opencv实战(零)——检测标记点
在实际应用中,能够直接利用霍夫圆检测这些理想方法的应用场景是非常少的,更多的是利用拟合的办法去寻找圆形。
大致思路如下,首先先选择要处理的ROI部分,记录下该图的左上点在原图的坐标,如果原图过大,要先进行等比例缩放;然后利用自适应阈值和Canny边缘提取进行处理,再进行闭运算与轮廓检测,计算点集面积,通过筛选面积阈值去除杂点,最后进行轮廓检测,拟合椭圆,效果如下:
1.导入原图:

2.截取ROI

3.进行自适应阈值化与Canny边缘提取
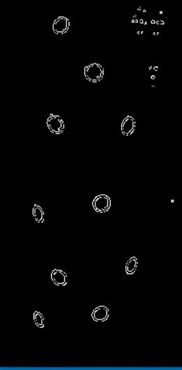
4.进行闭运算,然后轮廓检测,然后计算点集面积,通过面积阈值去除杂点

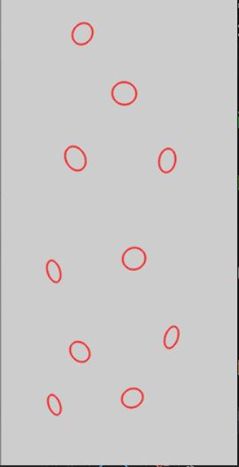
5.再次进行轮廓检测,拟合椭圆

代码如下:
#include