【使用Pytorch搭建resnet网络框架结合单/多GPU并行训练分类模型】
【使用Pytorch搭建resnet网络框架结合单/多GPU并行训练分类模型】
- 一、文前白话
- 二、使用GPU并行训练相关知识
-
- 1、多GPU的一般使用方法
- 2、并行训练过程需要知晓的点
-
- ① 数据如何在不同的设备之间分配
- ② 误差梯度如何在不同的设备之间通信
- ③ BatchNormalization 如何在不同的设备之间同步数据
- 3、PyTorch官方给出的不同的GPU加速模型方式
-
-
- 3.1 两种模式
- ① DataParallel (稍早出现)
- ② DistributedDataParallel (迭代更新后的版本)
- 3.2 不同的GPU训练启动方式
-
- ①DistributedSampler方法
- ② BatchSampler方法
-
- 三、实操训练过程涉及代码与解析
-
- 3.1 环境依赖
- 3.2脚本解析
-
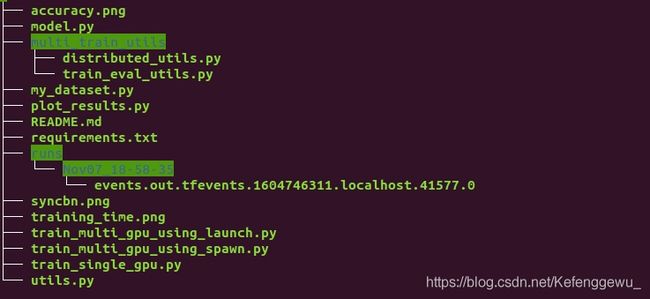
- 3.2.1 运行文件夹目录树结构
-
- ①train_single_gpu.py 脚本解析
-
- 可视化训练结果
- ②train_multi_gpu_with_launch.py 脚本解析
- ③ train_multi_gpu_with_multiprocessing.py 脚本解析
- 附: 其他相关 脚本
-
-
- ①model.py
- ②distributed_utils.py 文件
- ③train_eval_utils.py 文件
- ④my_dataset.py 文件
- ⑤ plot_results.py 文件
- 6. utils.py 文件
-
- Reference
一、文前白话
本文学习并介绍如何使用pytorch框架配合单/多GPU展开模型的训练过程与代码脚本操作,以搭建的resnet网络框架训练花分类数据集分类模型为例,帮助实现计算资源的合理利用。

二、使用GPU并行训练相关知识
1、多GPU的一般使用方法
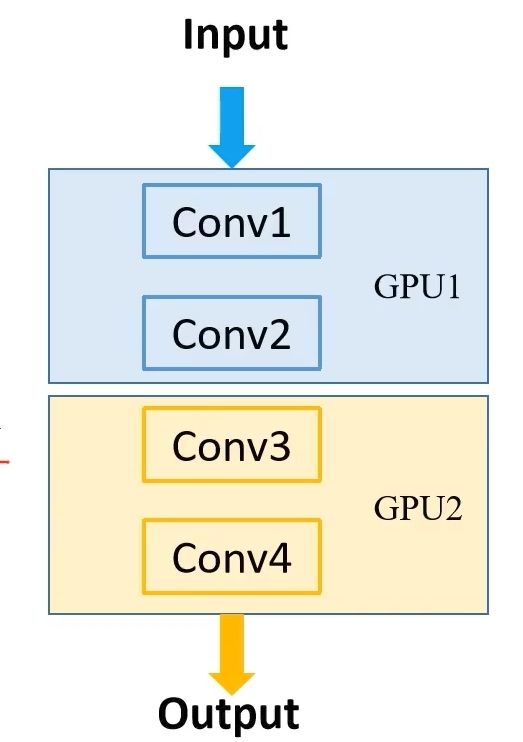
- model parallel 模型并行
可以把一个很大的数据模型分布在不同的GPU上,实际上对于训练速度没什么帮助。
图示如下:
- data parallel 数据并行
将整块模型放到一个GPU中(每个GPU中都复制有相同的模型),同时输入更多的数据集进行训练,相当于加大了batchsize , 加快训练了速度。
流程图示:

2、并行训练过程需要知晓的点
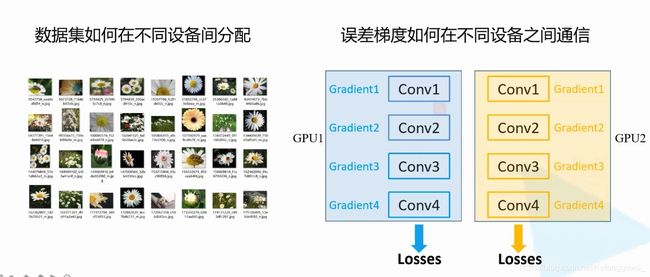
① 数据如何在不同的设备之间分配
② 误差梯度如何在不同的设备之间通信
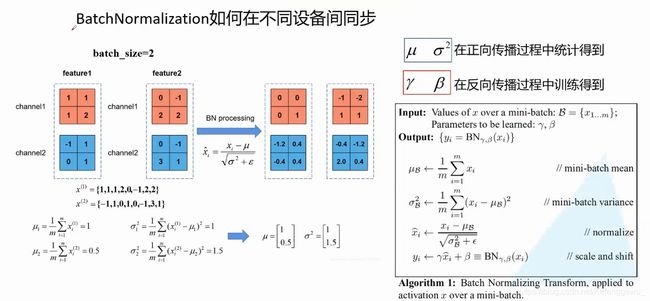
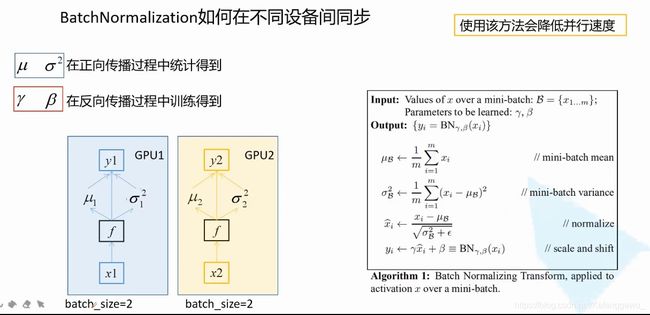
③ BatchNormalization 如何在不同的设备之间同步数据
3、PyTorch官方给出的不同的GPU加速模型方式
更多的可以去官网了解(单机多卡、多机多卡等)使用教程
阅读官方文档
链接:PyTorch官网
3.1 两种模式
① DataParallel (稍早出现)
单进程,多线程,适用于单机设备上
可适用:单机多卡
② DistributedDataParallel (迭代更新后的版本)
多进程,单机 多机均可,单机下运算更快
可适用:单机多卡,多机多卡
链接: 官方文档两种模式对比说明

3.2 不同的GPU训练启动方式
- torch.distributed.launch
代码量少,启动速度快,一般多卡情况下使用
启动方式:
python -m torch.distributed.launch --(加上参数以及 脚本名称)
python -m torch.distributed.launch --help # 查看使用说明
- torch.multiprocessing
相比,有更好的控制性和灵活性
启动方式:
python -m torch.multiprocessing --(加上参数以及 脚本名称)
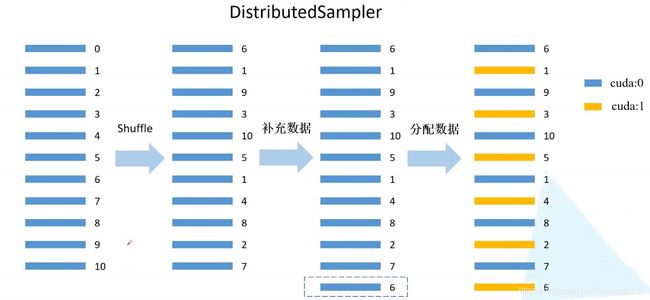
①DistributedSampler方法
作用图示:
假设此时有11个样本数据,如下进行GPU设备之间的数据分配:
假设有2块GPU设备,样本数量/GPU数量=向上取整数 :2
重分配时候,不足的取第一个补足。 将数据均匀分配到GPU设备中。
② BatchSampler方法
作用图示:

三、实操训练过程涉及代码与解析
3.1 环境依赖
- python == 3.7
- matplotlib == 3.2.1
- tqdm == 4.42.1
- torchvision == 0.7.0
- torch == 1.6.0
3.2脚本解析
3.2.1 运行文件夹目录树结构
①train_single_gpu.py 脚本解析
使用单机单卡训练脚本
#@ Time: 2021-07-23
# recoder:Wupke
import os
import math
import argparse
import torch
import torch.optim as optim
from torch.utils.tensorboard import SummaryWriter
from torchvision import transforms
import torch.optim.lr_scheduler as lr_scheduler
from model import resnet34, resnet101
from my_dataset import MyDataSet
from utils import read_split_data
from multi_train_utils.train_eval_utils import train_one_epoch, evaluate
def main(args):
device = torch.device(args.device if torch.cuda.is_available() else "cpu")
print(args)
print('Start Tensorboard with "tensorboard --logdir=logs", view at http://localhost:6006/')
tb_writer = SummaryWriter(log_dir="logs")
if os.path.exists("./weights") is False:
os.makedirs("./weights")
train_info, val_info, num_classes = read_split_data(args.data_path)
train_images_path, train_images_label = train_info
val_images_path, val_images_label = val_info
# check num_classes
assert args.num_classes == num_classes, "dataset num_classes: {}, input {}".format(args.num_classes,
num_classes)
data_transform = {
"train": transforms.Compose([transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])]),
"val": transforms.Compose([transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])}
# 实例化训练数据集
train_data_set = MyDataSet(images_path=train_images_path,
images_class=train_images_label,
transform=data_transform["train"])
# 实例化验证数据集
val_data_set = MyDataSet(images_path=val_images_path,
images_class=val_images_label,
transform=data_transform["val"])
batch_size = args.batch_size
nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8]) # number of workers
print('Using {} dataloader workers every process'.format(nw))
train_loader = torch.utils.data.DataLoader(train_data_set,
batch_size=batch_size,
shuffle=True,
pin_memory=True,
num_workers=nw,
collate_fn=train_data_set.collate_fn)
val_loader = torch.utils.data.DataLoader(val_data_set,
batch_size=batch_size,
shuffle=False,
pin_memory=True,
num_workers=nw,
collate_fn=val_data_set.collate_fn)
# 如果存在预训练权重则载入
model = resnet34(num_classes=args.num_classes).to(device)
if os.path.exists(args.weights):
weights_dict = torch.load(args.weights, map_location=device)
load_weights_dict = {k: v for k, v in weights_dict.items()
if model.state_dict()[k].numel() == v.numel()}
model.load_state_dict(load_weights_dict, strict=False)
# 是否冻结权重
if args.freeze_layers:
for name, para in model.named_parameters():
# 除最后的全连接层外,其他权重全部冻结
if "fc" not in name:
para.requires_grad_(False)
pg = [p for p in model.parameters() if p.requires_grad]
optimizer = optim.SGD(pg, lr=args.lr, momentum=0.9, weight_decay=0.005)
# Scheduler https://arxiv.org/pdf/1812.01187.pdf
lf = lambda x: ((1 + math.cos(x * math.pi / args.epochs)) / 2) * (1 - args.lrf) + args.lrf # cosine
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
for epoch in range(args.epochs):
# train
mean_loss = train_one_epoch(model=model,
optimizer=optimizer,
data_loader=train_loader,
device=device,
epoch=epoch)
scheduler.step()
# validate
sum_num = evaluate(model=model,
data_loader=val_loader,
device=device)
acc = sum_num / len(val_data_set)
print("[epoch {}] accuracy: {}".format(epoch, round(acc, 3)))
tags = ["loss", "accuracy", "learning_rate"]
tb_writer.add_scalar(tags[0], mean_loss, epoch)
tb_writer.add_scalar(tags[1], acc, epoch)
tb_writer.add_scalar(tags[2], optimizer.param_groups[0]["lr"], epoch)
torch.save(model.state_dict(), "./weights/model-{}.pth".format(epoch))
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--num_classes', type=int, default=5)
parser.add_argument('--epochs', type=int, default=20)
parser.add_argument('--batch-size', type=int, default=8)
parser.add_argument('--lr', type=float, default=0.001)
parser.add_argument('--lrf', type=float, default=0.1)
# 数据集所在根目录
# http://download.tensorflow.org/example_images/flower_photos.tgz # 官方花分类数据集下载链接
parser.add_argument('--data-path', type=str,
default="/home/Git/pytorch/tensorboard/flower_photos")
# resnet34 官方权重下载地址
# https://download.pytorch.org/models/resnet34-333f7ec4.pth
parser.add_argument('--weights', type=str, default='resNet34.pth',
help='initial weights path')
parser.add_argument('--freeze-layers', type=bool, default=False) # 这里未使用预训练权重
parser.add_argument('--device', default='cuda', help='device id (i.e. 0 or 0,1 or cpu)')
opt = parser.parse_args()
main(opt)
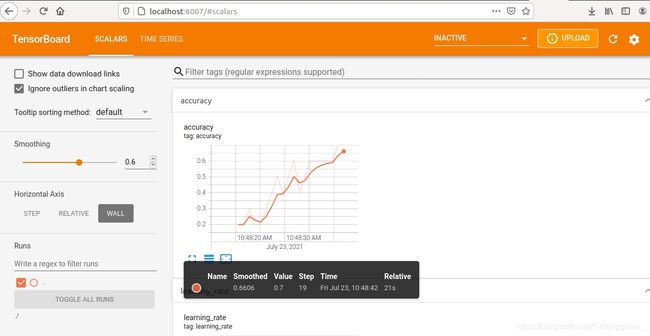
可视化训练结果
选择了部分花数据集(各选50张)进行训练,可视化结果图下:
具体的可视化训练过程,及数据格式、训练参数设置等训练小细节,可参考之前的博文链接: 如何在Pytorch中使用Tensorboard可视化训练过程.

②train_multi_gpu_with_launch.py 脚本解析
基于torch.distributed.launch启动方式的训练
脚本代码:
#@ Time: 2021-07-23
# recoder:Wupke
import os
import math
import tempfile
import argparse
import torch
import torch.optim as optim
import torch.optim.lr_scheduler as lr_scheduler
from torch.utils.tensorboard import SummaryWriter
from torchvision import transforms
from model import resnet34
from my_dataset import MyDataSet
from utils import read_split_data, plot_data_loader_image
from multi_train_utils.distributed_utils import init_distributed_mode, dist, cleanup
from multi_train_utils.train_eval_utils import train_one_epoch, evaluate
def main(args):
if torch.cuda.is_available() is False:
raise EnvironmentError("not find GPU device for training.")
# 初始化各进程环境
init_distributed_mode(args=args)
rank = args.rank
device = torch.device(args.device)
batch_size = args.batch_size
num_classes = args.num_classes
weights_path = args.weights
args.lr *= args.world_size # 学习率要根据并行GPU的数量进行倍增
if rank == 0: # 在第一个进程中打印信息,并实例化tensorboard
print(args)
print('Start Tensorboard with "tensorboard --logdir=runs", view at http://localhost:6006/')
tb_writer = SummaryWriter()
if os.path.exists("./weights") is False:
os.makedirs("./weights")
train_info, val_info, num_classes = read_split_data(args.data_path)
train_images_path, train_images_label = train_info
val_images_path, val_images_label = val_info
# check num_classes
assert args.num_classes == num_classes, "dataset num_classes: {}, input {}".format(args.num_classes,
num_classes)
data_transform = {
"train": transforms.Compose([transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])]),
"val": transforms.Compose([transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])}
# 实例化训练数据集
train_data_set = MyDataSet(images_path=train_images_path,
images_class=train_images_label,
transform=data_transform["train"])
# 实例化验证数据集
val_data_set = MyDataSet(images_path=val_images_path,
images_class=val_images_label,
transform=data_transform["val"])
# 给每个rank对应的进程分配训练的样本索引
train_sampler = torch.utils.data.distributed.DistributedSampler(train_data_set)
# DistributedSampler 函数可到官网文档查看定义参数与使用样例
val_sampler = torch.utils.data.distributed.DistributedSampler(val_data_set)
# 将样本索引每batch_size个元素组成一个list
train_batch_sampler = torch.utils.data.BatchSampler(
train_sampler, batch_size, drop_last=True)
nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8]) # number of workers
if rank == 0:
print('Using {} dataloader workers every process'.format(nw))
train_loader = torch.utils.data.DataLoader(train_data_set,
batch_sampler=train_batch_sampler,
pin_memory=True,
num_workers=nw,
collate_fn=train_data_set.collate_fn)
val_loader = torch.utils.data.DataLoader(val_data_set,
batch_size=batch_size,
sampler=val_sampler,
pin_memory=True,
num_workers=nw,
collate_fn=val_data_set.collate_fn)
# 实例化模型
model = resnet34(num_classes=num_classes).to(device)
# 如果存在预训练权重则载入
if os.path.exists(weights_path):
weights_dict = torch.load(weights_path, map_location=device)
load_weights_dict = {k: v for k, v in weights_dict.items()
if model.state_dict()[k].numel() == v.numel()}
model.load_state_dict(load_weights_dict, strict=False)
else:
checkpoint_path = os.path.join(tempfile.gettempdir(), "initial_weights.pt")
# 如果不存在预训练权重,需要将第一个进程中的权重保存,然后其他进程载入,保持初始化权重一致
if rank == 0:
torch.save(model.state_dict(), checkpoint_path)
dist.barrier()
# 这里注意,一定要指定map_location参数,否则会导致第一块GPU占用更多资源
model.load_state_dict(torch.load(checkpoint_path, map_location=device))
# 是否冻结权重
if args.freeze_layers:
for name, para in model.named_parameters():
# 除最后的全连接层外,其他权重全部冻结
if "fc" not in name:
para.requires_grad_(False)
else:
# 只有训练带有BN结构的网络时使用SyncBatchNorm采用意义
if args.syncBN:
# 使用SyncBatchNorm后训练会更耗时
model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
# 转为DDP模型
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.gpu])
# optimizer
pg = [p for p in model.parameters() if p.requires_grad]
optimizer = optim.SGD(pg, lr=args.lr, momentum=0.9, weight_decay=0.005)
# Scheduler https://arxiv.org/pdf/1812.01187.pdf
lf = lambda x: ((1 + math.cos(x * math.pi / args.epochs)) / 2) * (1 - args.lrf) + args.lrf # cosine
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
for epoch in range(args.epochs):
train_sampler.set_epoch(epoch)
mean_loss = train_one_epoch(model=model,
optimizer=optimizer,
data_loader=train_loader,
device=device,
epoch=epoch)
scheduler.step()
sum_num = evaluate(model=model,
data_loader=val_loader,
device=device)
acc = sum_num / val_sampler.total_size
if rank == 0:
print("[epoch {}] accuracy: {}".format(epoch, round(acc, 3)))
tags = ["loss", "accuracy", "learning_rate"]
tb_writer.add_scalar(tags[0], mean_loss, epoch)
tb_writer.add_scalar(tags[1], acc, epoch)
tb_writer.add_scalar(tags[2], optimizer.param_groups[0]["lr"], epoch)
torch.save(model.module.state_dict(), "./weights/model-{}.pth".format(epoch))
# 删除临时缓存文件
if rank == 0:
if os.path.exists(checkpoint_path) is True:
os.remove(checkpoint_path)
cleanup()
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--num_classes', type=int, default=5)
parser.add_argument('--epochs', type=int, default=30)
parser.add_argument('--batch-size', type=int, default=16)
parser.add_argument('--lr', type=float, default=0.001)
parser.add_argument('--lrf', type=float, default=0.1)
# 是否启用SyncBatchNorm
parser.add_argument('--syncBN', type=bool, default=True)
# 数据集所在根目录
# http://download.tensorflow.org/example_images/flower_photos.tgz
parser.add_argument('--data-path', type=str, default="/home/flower_data/flower_photos")
# resnet34 官方权重下载地址
# https://download.pytorch.org/models/resnet34-333f7ec4.pth
parser.add_argument('--weights', type=str, default='resNet34.pth',
help='initial weights path')
parser.add_argument('--freeze-layers', type=bool, default=False)
# 不要改该参数,系统会自动分配
parser.add_argument('--device', default='cuda', help='device id (i.e. 0 or 0,1 or cpu)')
# 开启的进程数(注意不是线程),不用设置该参数,会根据nproc_per_node自动设置
parser.add_argument('--world-size', default=4, type=int,
help='number of distributed processes')
parser.add_argument('--dist-url', default='env://', help='url used to set up distributed training')
opt = parser.parse_args()
main(opt)
③ train_multi_gpu_with_multiprocessing.py 脚本解析
基于torch.multiprocessing启动方式的训练
脚本代码:
#@ Time: 2021-07-23
# recoder:Wupke
import os
import math
import tempfile
import argparse
import torch
import torch.multiprocessing as mp
from torch.multiprocessing import Process
import torch.optim as optim
import torch.optim.lr_scheduler as lr_scheduler
from torch.utils.tensorboard import SummaryWriter
from torchvision import transforms
from model import resnet34
from my_dataset import MyDataSet
from utils import read_split_data, plot_data_loader_image
from multi_train_utils.distributed_utils import dist, cleanup
from multi_train_utils.train_eval_utils import train_one_epoch, evaluate
def main_fun(rank, world_size, args):
if torch.cuda.is_available() is False:
raise EnvironmentError("not find GPU device for training.")
# 初始化各进程环境 start
os.environ["MASTER_ADDR"] = "localhost"
os.environ["MASTER_PORT"] = "12355"
args.rank = rank
args.world_size = world_size
args.gpu = rank
args.distributed = True
torch.cuda.set_device(args.gpu)
args.dist_backend = 'nccl'
print('| distributed init (rank {}): {}'.format(
args.rank, args.dist_url), flush=True)
dist.init_process_group(backend=args.dist_backend, init_method=args.dist_url,
world_size=args.world_size, rank=args.rank)
dist.barrier()
# 初始化各进程环境 end
rank = args.rank
device = torch.device(args.device)
batch_size = args.batch_size
num_classes = args.num_classes
weights_path = args.weights
args.lr *= args.world_size # 学习率要根据并行GPU的数量进行倍增
if rank == 0: # 在第一个进程中打印信息,并实例化tensorboard
print(args)
print('Start Tensorboard with "tensorboard --logdir=runs", view at http://localhost:6006/')
tb_writer = SummaryWriter()
if os.path.exists("./weights") is False:
os.makedirs("./weights")
train_info, val_info, num_classes = read_split_data(args.data_path)
train_images_path, train_images_label = train_info
val_images_path, val_images_label = val_info
# check num_classes
assert args.num_classes == num_classes, "dataset num_classes: {}, input {}".format(args.num_classes,
num_classes)
data_transform = {
"train": transforms.Compose([transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])]),
"val": transforms.Compose([transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])}
# 实例化训练数据集
train_data_set = MyDataSet(images_path=train_images_path,
images_class=train_images_label,
transform=data_transform["train"])
# 实例化验证数据集
val_data_set = MyDataSet(images_path=val_images_path,
images_class=val_images_label,
transform=data_transform["val"])
# 给每个rank对应的进程分配训练的样本索引
train_sampler = torch.utils.data.distributed.DistributedSampler(train_data_set)
val_sampler = torch.utils.data.distributed.DistributedSampler(val_data_set)
# 将样本索引每batch_size个元素组成一个list
train_batch_sampler = torch.utils.data.BatchSampler(
train_sampler, batch_size, drop_last=True)
nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8]) # number of workers
if rank == 0:
print('Using {} dataloader workers every process'.format(nw))
train_loader = torch.utils.data.DataLoader(train_data_set,
batch_sampler=train_batch_sampler,
pin_memory=True,
num_workers=nw,
collate_fn=train_data_set.collate_fn)
val_loader = torch.utils.data.DataLoader(val_data_set,
batch_size=batch_size,
sampler=val_sampler,
pin_memory=True,
num_workers=nw,
collate_fn=val_data_set.collate_fn)
# 实例化模型
model = resnet34(num_classes=num_classes).to(device)
# 如果存在预训练权重则载入
if os.path.exists(weights_path):
weights_dict = torch.load(weights_path, map_location=device)
load_weights_dict = {k: v for k, v in weights_dict.items()
if model.state_dict()[k].numel() == v.numel()}
model.load_state_dict(load_weights_dict, strict=False)
else:
checkpoint_path = os.path.join(tempfile.gettempdir(), "initial_weights.pt")
# 如果不存在预训练权重,需要将第一个进程中的权重保存,然后其他进程载入,保持初始化权重一致
if rank == 0:
torch.save(model.state_dict(), checkpoint_path)
dist.barrier()
# 这里注意,一定要指定map_location参数,否则会导致第一块GPU占用更多资源
model.load_state_dict(torch.load(checkpoint_path, map_location=device))
# 是否冻结权重
if args.freeze_layers:
for name, para in model.named_parameters():
# 除最后的全连接层外,其他权重全部冻结
if "fc" not in name:
para.requires_grad_(False)
else:
# 只有训练带有BN结构的网络时使用SyncBatchNorm采用意义
if args.syncBN:
# 使用SyncBatchNorm后训练会更耗时
model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
# 转为DDP模型
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.gpu])
# optimizer
pg = [p for p in model.parameters() if p.requires_grad]
optimizer = optim.SGD(pg, lr=args.lr, momentum=0.9, weight_decay=0.005)
# Scheduler https://arxiv.org/pdf/1812.01187.pdf
lf = lambda x: ((1 + math.cos(x * math.pi / args.epochs)) / 2) * (1 - args.lrf) + args.lrf # cosine
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
for epoch in range(args.epochs):
train_sampler.set_epoch(epoch)
mean_loss = train_one_epoch(model=model,
optimizer=optimizer,
data_loader=train_loader,
device=device,
epoch=epoch)
scheduler.step()
sum_num = evaluate(model=model,
data_loader=val_loader,
device=device)
acc = sum_num / val_sampler.total_size
if rank == 0:
print("[epoch {}] accuracy: {}".format(epoch, round(acc, 3)))
tags = ["loss", "accuracy", "learning_rate"]
tb_writer.add_scalar(tags[0], mean_loss, epoch)
tb_writer.add_scalar(tags[1], acc, epoch)
tb_writer.add_scalar(tags[2], optimizer.param_groups[0]["lr"], epoch)
torch.save(model.module.state_dict(), "./weights/model-{}.pth".format(epoch))
# 删除临时缓存文件
if rank == 0:
if os.path.exists(checkpoint_path) is True:
os.remove(checkpoint_path)
cleanup()
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--num_classes', type=int, default=5)
parser.add_argument('--epochs', type=int, default=30)
parser.add_argument('--batch-size', type=int, default=16)
parser.add_argument('--lr', type=float, default=0.001)
parser.add_argument('--lrf', type=float, default=0.1)
# 是否启用SyncBatchNorm
parser.add_argument('--syncBN', type=bool, default=True)
# 数据集所在根目录
# http://download.tensorflow.org/example_images/flower_photos.tgz
parser.add_argument('--data-path', type=str, default="/home/flower_data/flower_photos")
# resnet34 官方权重下载地址
# https://download.pytorch.org/models/resnet34-333f7ec4.pth
parser.add_argument('--weights', type=str, default='resNet34.pth',
help='initial weights path')
parser.add_argument('--freeze-layers', type=bool, default=False)
# 不要改该参数,系统会自动分配
parser.add_argument('--device', default='cuda', help='device id (i.e. 0 or 0,1 or cpu)')
# 开启的进程数(注意不是线程),在单机中指使用GPU的数量
parser.add_argument('--world-size', default=4, type=int,
help='number of distributed processes')
parser.add_argument('--dist-url', default='env://', help='url used to set up distributed training')
opt = parser.parse_args()
# when using mp.spawn, if I set number of works greater 1,
# before each epoch training and validation will wait about 10 seconds
# mp.spawn(main_fun,
# args=(opt.world_size, opt),
# nprocs=opt.world_size,
# join=True)
world_size = opt.world_size
processes = []
for rank in range(world_size):
p = Process(target=main_fun, args=(rank, world_size, opt))
p.start()
processes.append(p)
for p in processes:
p.join()
附: 其他相关 脚本
实际训练过程,可以依据上述的文件目录树结构存放,并构建好数据集,配置环境依赖,调整路径与参数,进行训练调试。
①model.py
# 搭建resnet网络结构
import torch.nn as nn
import torch
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_channel, out_channel, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=out_channel,
kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel,
kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channel)
self.downsample = downsample
def forward(self, x):
identity = x
if self.downsample is not None:
identity = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out += identity
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, in_channel, out_channel, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=out_channel,
kernel_size=1, stride=1, bias=False) # squeeze channels
self.bn1 = nn.BatchNorm2d(out_channel)
# -----------------------------------------
self.conv2 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel,
kernel_size=3, stride=stride, bias=False, padding=1)
self.bn2 = nn.BatchNorm2d(out_channel)
# -----------------------------------------
self.conv3 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel*self.expansion,
kernel_size=1, stride=1, bias=False) # unsqueeze channels
self.bn3 = nn.BatchNorm2d(out_channel*self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
def forward(self, x):
identity = x
if self.downsample is not None:
identity = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
out += identity
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, blocks_num, num_classes=1000, include_top=True):
super(ResNet, self).__init__()
self.include_top = include_top
self.in_channel = 64
self.conv1 = nn.Conv2d(3, self.in_channel, kernel_size=7, stride=2,
padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(self.in_channel)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, blocks_num[0])
self.layer2 = self._make_layer(block, 128, blocks_num[1], stride=2)
self.layer3 = self._make_layer(block, 256, blocks_num[2], stride=2)
self.layer4 = self._make_layer(block, 512, blocks_num[3], stride=2)
if self.include_top:
self.avgpool = nn.AdaptiveAvgPool2d((1, 1)) # output size = (1, 1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
def _make_layer(self, block, channel, block_num, stride=1):
downsample = None
if stride != 1 or self.in_channel != channel * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.in_channel, channel * block.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(channel * block.expansion))
layers = []
layers.append(block(self.in_channel, channel, downsample=downsample, stride=stride))
self.in_channel = channel * block.expansion
for _ in range(1, block_num):
layers.append(block(self.in_channel, channel))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
if self.include_top:
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x
def resnet34(num_classes=1000, include_top=True):
return ResNet(BasicBlock, [3, 4, 6, 3], num_classes=num_classes, include_top=include_top)
def resnet101(num_classes=1000, include_top=True):
return ResNet(Bottleneck, [3, 4, 23, 3], num_classes=num_classes, include_top=include_top)
②distributed_utils.py 文件
import os
import torch
import torch.distributed as dist
def init_distributed_mode(args):
# 多机多卡情况下,RANK 第几台设备 WORLD_SIZE 使用了几台设备, LOCAL_RANK 某一台机器上第几块GPU设备
# 单机多卡下,RANK 第几块GPU WORLD_SIZE 使用了几块GPU, LOCAL_RANK 也是第几块GPU
if 'RANK' in os.environ and 'WORLD_SIZE' in os.environ:
args.rank = int(os.environ["RANK"])
args.world_size = int(os.environ['WORLD_SIZE'])
args.gpu = int(os.environ['LOCAL_RANK'])
elif 'SLURM_PROCID' in os.environ:
args.rank = int(os.environ['SLURM_PROCID'])
args.gpu = args.rank % torch.cuda.device_count()
else:
print('Not using distributed mode')
args.distributed = False
return
args.distributed = True
torch.cuda.set_device(args.gpu)
args.dist_backend = 'nccl' # 通信后端,nvidia GPU推荐使用NCCL
print('| distributed init (rank {}): {}'.format(
args.rank, args.dist_url), flush=True)
dist.init_process_group(backend=args.dist_backend, init_method=args.dist_url,
world_size=args.world_size, rank=args.rank)
dist.barrier()
def cleanup():
dist.destroy_process_group()
def is_dist_avail_and_initialized():
"""检查是否支持分布式环境"""
if not dist.is_available():
return False
if not dist.is_initialized():
return False
return True
def get_world_size():
if not is_dist_avail_and_initialized():
return 1
return dist.get_world_size()
def get_rank():
if not is_dist_avail_and_initialized():
return 0
return dist.get_rank()
def is_main_process():
return get_rank() == 0
def reduce_value(value, average=True):
world_size = get_world_size()
if world_size < 2: # 单GPU的情况
return value
with torch.no_grad():
dist.all_reduce(value)
if average:
value /= world_size
return value
③train_eval_utils.py 文件
import sys
from tqdm import tqdm
import torch
from multi_train_utils.distributed_utils import reduce_value, is_main_process
def train_one_epoch(model, optimizer, data_loader, device, epoch):
model.train()
loss_function = torch.nn.CrossEntropyLoss()
mean_loss = torch.zeros(1).to(device)
optimizer.zero_grad()
# 在进程0中打印训练进度
if is_main_process():
data_loader = tqdm(data_loader)
for step, data in enumerate(data_loader):
images, labels = data
pred = model(images.to(device))
loss = loss_function(pred, labels.to(device))
loss.backward() # loss反向传播
loss = reduce_value(loss, average=True)
mean_loss = (mean_loss * step + loss.detach()) / (step + 1) # update mean losses
# 在进程0中打印平均loss
if is_main_process():
data_loader.desc = "[epoch {}] mean loss {}".format(epoch, round(mean_loss.item(), 3))
if not torch.isfinite(loss):
print('WARNING: non-finite loss, ending training ', loss)
sys.exit(1)
optimizer.step()
optimizer.zero_grad()
# 等待所有进程计算完毕
if device != torch.device("cpu"):
torch.cuda.synchronize(device)
return mean_loss.item()
@torch.no_grad()
def evaluate(model, data_loader, device):
model.eval()
# 用于存储预测正确的样本个数
sum_num = torch.zeros(1).to(device)
# 在进程0中打印验证进度
if is_main_process():
data_loader = tqdm(data_loader)
for step, data in enumerate(data_loader):
images, labels = data
pred = model(images.to(device))
pred = torch.max(pred, dim=1)[1]
sum_num += torch.eq(pred, labels.to(device)).sum()
# 等待所有进程计算完毕
if device != torch.device("cpu"):
torch.cuda.synchronize(device)
sum_num = reduce_value(sum_num, average=False)
return sum_num.item()
④my_dataset.py 文件
自定义数据集与划分
from PIL import Image
import torch
from torch.utils.data import Dataset
class MyDataSet(Dataset):
"""自定义数据集"""
def __init__(self, images_path: list, images_class: list, transform=None):
self.images_path = images_path
self.images_class = images_class
self.transform = transform
def __len__(self):
return len(self.images_path)
def __getitem__(self, item):
img = Image.open(self.images_path[item])
# RGB为彩色图片,L为灰度图片
if img.mode != 'RGB':
raise ValueError("image: {} isn't RGB mode.".format(self.images_path[item]))
label = self.images_class[item]
if self.transform is not None:
img = self.transform(img)
return img, label
@staticmethod
def collate_fn(batch):
# 官方实现的default_collate可以参考
# https://github.com/pytorch/pytorch/blob/67b7e751e6b5931a9f45274653f4f653a4e6cdf6/torch/utils/data/_utils/collate.py
images, labels = tuple(zip(*batch))
images = torch.stack(images, dim=0)
labels = torch.as_tensor(labels)
return images, labels
⑤ plot_results.py 文件
matplotlib模块实现绘图
import math
import matplotlib.pyplot as plt
x = [0, 1, 2, 3]
y = [9, 5.5, 3, 2]
plt.bar(x, y, align='center')
plt.xticks(range(len(x)), ['One-GPU', '2 GPUs', '4 GPUs', '8 GPUs'])
plt.ylim((0, 10))
for i, v in enumerate(y):
plt.text(x=i, y=v + 0.1, s=str(v) + ' s', ha='center')
plt.xlabel('Using number of GPU device')
plt.ylabel('Training time per epoch (second)')
plt.show()
plt.close()
x = list(range(30))
no_SyncBatchNorm = [0.348, 0.495, 0.587, 0.554, 0.637,
0.622, 0.689, 0.673, 0.702, 0.717,
0.717, 0.69, 0.716, 0.696, 0.738,
0.75, 0.75, 0.66, 0.713, 0.758,
0.777, 0.777, 0.769, 0.792, 0.802,
0.807, 0.807, 0.804, 0.812, 0.811]
SyncBatchNorm = [0.283, 0.514, 0.531, 0.654, 0.671,
0.591, 0.621, 0.685, 0.701, 0.732,
0.701, 0.74, 0.667, 0.723, 0.745,
0.679, 0.738, 0.772, 0.764, 0.765,
0.764, 0.791, 0.818, 0.791, 0.807,
0.806, 0.811, 0.821, 0.833, 0.81]
plt.plot(x, no_SyncBatchNorm, label="No SyncBatchNorm")
plt.plot(x, SyncBatchNorm, label="SyncBatchNorm")
plt.xlabel('Training epochs')
plt.ylabel('Accuracy')
plt.legend()
plt.show()
plt.close()
x = list(range(30))
single_gpu = [0.569, 0.576, 0.654, 0.648, 0.609,
0.637, 0.699, 0.709, 0.715, 0.715,
0.717, 0.724, 0.722, 0.731, 0.721,
0.774, 0.751, 0.787, 0.78, 0.77,
0.763, 0.803, 0.754, 0.796, 0.799,
0.815, 0.793, 0.808, 0.811, 0.806]
plt.plot(x, single_gpu, color="black", label="Single GPU")
plt.plot(x, no_SyncBatchNorm, label="No SyncBatchNorm")
plt.plot(x, SyncBatchNorm, label="SyncBatchNorm")
plt.xlabel('Training epochs')
plt.ylabel('Accuracy')
plt.legend()
plt.show()
plt.close()
# epochs = 30
# lrf = 0.1
# lf0 = lambda x: math.cos(x * math.pi / epochs)
# lf1 = lambda x: 1 + math.cos(x * math.pi / epochs)
# lf2 = lambda x: (1 + math.cos(x * math.pi / epochs)) / 2
# lf3 = lambda x: ((1 + math.cos(x * math.pi / epochs)) / 2) * (1 - lrf) + lrf
# x = range(epochs)
# y0 = [lf0(epoch) for epoch in x]
# y1 = [lf1(epoch) for epoch in x]
# y2 = [lf2(epoch) for epoch in x]
# y3 = [lf3(epoch) for epoch in x]
# plt.subplot(2, 2, 1)
# plt.plot(x, y0)
# plt.hlines(1, 0, epochs-1, colors="r", linestyles="dashed")
# plt.hlines(-1, 0, epochs-1, colors="r", linestyles="dashed")
# plt.xlim((0, epochs-1))
#
# plt.subplot(2, 2, 2)
# plt.plot(x, y1)
# plt.hlines(2, 0, epochs-1, colors="r", linestyles="dashed")
# plt.hlines(0, 0, epochs-1, colors="r", linestyles="dashed")
# plt.xlim((0, epochs-1))
#
# plt.subplot(2, 2, 3)
# plt.plot(x, y2)
# plt.hlines(1, 0, epochs-1, colors="r", linestyles="dashed")
# plt.hlines(0, 0, epochs-1, colors="r", linestyles="dashed")
# plt.xlim((0, epochs-1))
#
# plt.subplot(2, 2, 4)
# plt.plot(x, y3)
# plt.hlines(1, 0, epochs-1, colors="r", linestyles="dashed")
# plt.hlines(lrf, 0, epochs-1, colors="r", linestyles="dashed")
# plt.text(epochs-1, y3[-1], "{}".format(round(y3[-1], 1)))
# plt.xlim((0, epochs-1))
#
# plt.show()
# plt.close()
6. utils.py 文件
import os
import json
import pickle
import random
import matplotlib.pyplot as plt
def read_split_data(root: str, val_rate: float = 0.2):
random.seed(0) # 保证随机结果可复现
assert os.path.exists(root), "dataset root: {} does not exist.".format(root)
# 遍历文件夹,一个文件夹对应一个类别
class_names = [cla for cla in os.listdir(root) if os.path.isdir(os.path.join(root, cla))]
# 排序,保证顺序一致
class_names.sort()
# 生成类别名称以及对应的数字索引
class_indices = dict((k, v) for v, k in enumerate(class_names))
json_str = json.dumps(dict((val, key) for key, val in class_indices.items()), indent=4)
with open('class_indices.json', 'w') as json_file:
json_file.write(json_str)
train_images_path = [] # 存储训练集的所有图片路径
train_images_label = [] # 存储训练集图片对应索引信息
val_images_path = [] # 存储验证集的所有图片路径
val_images_label = [] # 存储验证集图片对应索引信息
every_class_num = [] # 存储每个类别的样本总数
supported = [".jpg", ".JPG", ".png", ".PNG"] # 支持的文件后缀类型
# 遍历每个文件夹下的文件
for cla in class_names:
cla_path = os.path.join(root, cla)
# 遍历获取supported支持的所有文件路径
images = [os.path.join(root, cla, i) for i in os.listdir(cla_path)
if os.path.splitext(i)[-1] in supported]
# 获取该类别对应的索引
image_class = class_indices[cla]
# 记录该类别的样本数量
every_class_num.append(len(images))
# 按比例随机采样验证样本
val_path = random.sample(images, k=int(len(images) * val_rate))
for img_path in images:
if img_path in val_path: # 如果该路径在采样的验证集样本中则存入验证集
val_images_path.append(img_path)
val_images_label.append(image_class)
else: # 否则存入训练集
train_images_path.append(img_path)
train_images_label.append(image_class)
print("{} images were found in the dataset.".format(sum(every_class_num)))
print("{} images for training.".format(len(train_images_path)))
print("{} images for validation.".format(len(val_images_path)))
plot_image = False
if plot_image:
# 绘制每种类别个数柱状图
plt.bar(range(len(class_names)), every_class_num, align='center')
# 将横坐标0,1,2,3,4替换为相应的类别名称
plt.xticks(range(len(class_names)), class_names)
# 在柱状图上添加数值标签
for i, v in enumerate(every_class_num):
plt.text(x=i, y=v + 5, s=str(v), ha='center')
# 设置x坐标
plt.xlabel('image class')
# 设置y坐标
plt.ylabel('number of images')
# 设置柱状图的标题
plt.title('flower class distribution')
plt.show()
return [train_images_path, train_images_label], [val_images_path, val_images_label], len(class_names)
def plot_data_loader_image(data_loader):
batch_size = data_loader.batch_size
plot_num = min(batch_size, 4)
json_path = './class_indices.json'
assert os.path.exists(json_path), json_path + " does not exist."
json_file = open(json_path, 'r')
class_indices = json.load(json_file)
for data in data_loader:
images, labels = data
for i in range(plot_num):
# [C, H, W] -> [H, W, C]
img = images[i].numpy().transpose(1, 2, 0)
# 反Normalize操作
img = (img * [0.229, 0.224, 0.225] + [0.485, 0.456, 0.406]) * 255
label = labels[i].item()
plt.subplot(1, plot_num, i+1)
plt.xlabel(class_indices[str(label)])
plt.xticks([]) # 去掉x轴的刻度
plt.yticks([]) # 去掉y轴的刻度
plt.imshow(img.astype('uint8'))
plt.show()
def write_pickle(list_info: list, file_name: str):
with open(file_name, 'wb') as f:
pickle.dump(list_info, f)
def read_pickle(file_name: str) -> list:
with open(file_name, 'rb') as f:
info_list = pickle.load(f)
return info_list
Reference
①②③ ④⑤
https://www.bilibili.com/video/BV1yt4y1e7sZ