L298N 电机驱动板 - 详细介绍
L298N是意法半导体(ST
Semiconductor)集团旗下量产的一种双路全桥式电机驱动芯片,拥有工作电压高、输出电流大、驱动能力强、发热量低、抗干扰能力强等特点,通常用来驱动继电器、螺线管、电磁阀、直流电机以及步进电机。
什么是L298N?
L298是L293电机驱动芯片的高功率、大电流版本, 由Multiwatt 15封装,N是L298的封装标识符,另外还有其他两种不同类型的封装方式:
- P 立式封装
- HN 侧安封装

L298N就是L298的立式封装,源自意法半导体集团旗下品牌产品,是一款可接受高电压、大电流双路全桥式电机驱动芯片,工作电压可达46V,输出电流最高可至4A,采用Multiwatt 15脚封装,接受标准TTL逻辑电平信号,具有两个使能控制端,在不受输入信号影响的情况下通过板载跳帽插拔的方式,动态调整电路运作方式,有一个逻辑电源输入端,通过内置的稳压芯片78MO5,使内部逻辑电路部分在低电压下工作,也可以对外输出逻辑电压5V,为了避免稳压芯片损坏,当使用大于12V驱动电压时,务必使用外置的5V接口独立供电。
L298N通过控制主控芯片上的I/O输入端,直接通过电源来调节输出电压,即可实现电机的正转、反转、停止,由于电路简单,使用方便,通常情况下L298N可直接驱动继电器(四路)、螺线管、电磁阀、直流电机(两台)以及步进电机(一台两相或四相)。
主要特点是:
- 发热量低
- 抗干扰能力强
- 驱动能力强 (高电压、大电流)
- 可靠性高 (使用大容量滤波电容,续流保护二极管可过热自断和反馈检测)
- 工作电压高 (最高可至46V)
- 输出电流大 (瞬间峰值电流可达3A,持续工作电流为2A)
- 额定功率25W(电压 X 电流)
具体规格参数:
技术参数
- 电源电压(DC) 46.0V (max)
- 输出接口数 4
- 输出电压 46 V
- 输出电流 2 A
- 通道数 2
- 针脚数 15
- 耗散功率 25000 mW
- 输出电流(Max) 4 A
- 工作温度(Max) 130 ℃
- 工作温度(Min) -25 ℃
- 耗散功率(Max) 25000 mW
- 电源电压 4.5V ~ 7V
- 电源电压(Max) 7 V
- 电源电压(Min) 4.5 V
封装参数
- 安装方式 Through Hole
- 引脚数 15
- 封装 Multiwatt-15
外形尺寸
- 长度 19.6 mm
- 宽度 5 mm
- 高度 10.7 mm
L298N 电路图 | 封装图 | 封装焊盘图 | 引脚图
L298N 电路图
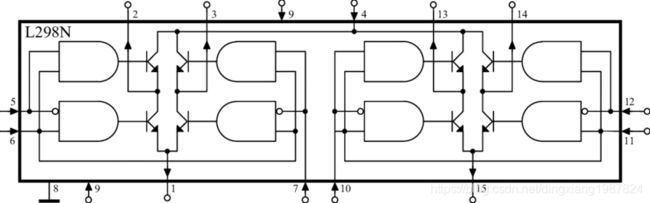
L298N是双H桥电路设计的哦,通过控制H桥上的电流流转方向达到对直流电机的方向进行控制,关于H桥电流感应详细控制这块,可以移步到这里:Current Sensing in an H-Bridge.pdf
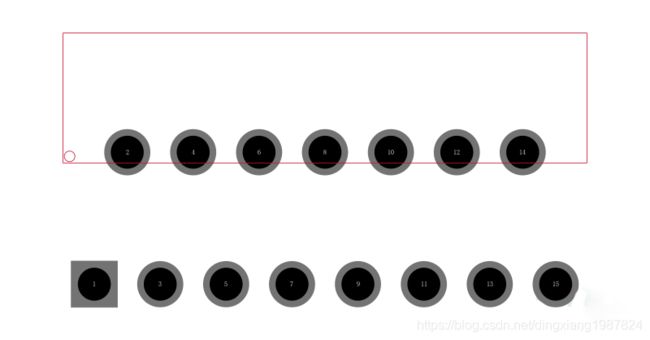
L298N 封装图


L298N 封装焊盘图
L298N 引脚图


关于L298N模块更多详细信息,可以下载附件(来源ST官网):Dual full-bridge driver.pdf
好了,前面说了一大堆关于L298N电机芯片,接下来重点讲述电机驱动板,红板…
L298N 电机驱动板
市场上有很多型号的L298N电机驱动板,使用方式基本没有多大变化,主要差别在于电路图布局上不一样,大家使用的时候稍微注意一下,如下图:

另外我们用使用最多,也是最常见的红板L298N来做示例,另外初学者建议从零部件开始学起,弄懂基本原理,像一些扩展板新手不建议拿来主义,还是自己装螺丝、拧铜线,从基础理论、实践开始做起
一睹L298N芳容吧

L298N电机驱动版主要由两个核心组件构成:
- L298N 驱动芯片
- 78M05 稳压器

1、L298N 驱动芯片
关于L298芯片这里不再重复讲述,不懂的同学再往回看,开篇已经陈述过了;
黑色散热片直接与L298 驱动芯片连接,散热片是一种无源热交换器,可将电子或机械设备产生的热量传递到流体介质中(空气或液体冷却剂),对芯片起到一定的散热作用,类似电脑中的风扇
2、78M05 稳压器
78M05是一种三端口电流正固定电压稳压器,这些端子分别是输入端子、公共端子和输出端子,使用平面外延制造工艺构造, 以TO-220形式封装,输出电流的最大值为500mA,输入偏置电流为3.2mA,输入电压的最大值为35V,由于其具有在过流过热时关断的保护功能,在现实中被广泛使用


本篇并非78M05主场,更多关于78M05稳压模块请查阅官方文档,附一个78M系列数据手册:ST_78M05DataSheet.pdf
稳压模块能否生效完全取决于5V使能跳帽是否启用(拔掉禁用、插入启用,默认是板载连通的),这里分两种情况,接通和未接通:

**板载跳帽:**当电源小于或等于12V时,内部电路将由稳压器供电,并且5V引脚作为微控制器供电的输出引脚,即:VCC作为7805的输入,5V是7805的输出,从而可以为板载提供5v电压,为外部电路供电使用
**拔掉跳帽:**当电源大于12V时,拔掉跳帽,并且应通过5V端子单独为内部供电,即:VCC不作为7805的输入,而+5v由外部电路提供,此时就需要两个供电电源,VCC和+5V
注意事项:
-
**7V
-
**12V
L298N 电机驱动板引脚
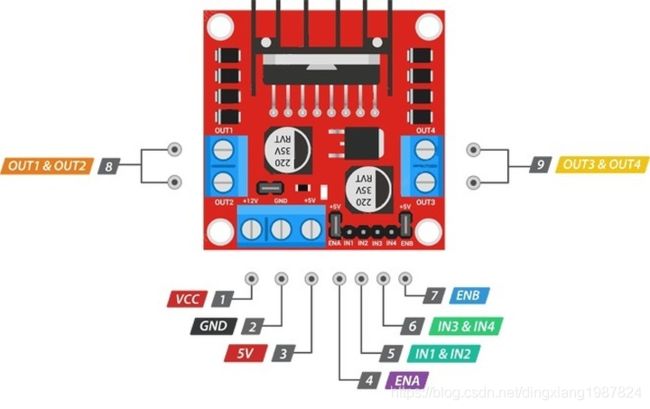
电源引脚
- VCC 外接直流电源引脚,电压范围在5~35V之间
- GND GND是接地引脚,连接到电源负极
- 5V 驱动芯片内部逻辑供电引脚,如果安装了5V跳帽,则此引脚可输出5V电压,为微控板或其他电路提供电力供给,如果拔掉5V跳帽,则需要独立外接5V电源
控制引脚
1. IN1 & IN2 电机驱动器A的输入引脚,控制电机A转动及旋转角度
IN1输入高电平HIGH,IN2输入低电平LOW,对应电机A正转
IN1输入低电平LOW,IN2输入高电平HIGH,对应电机A反转
IN1、IN2同时输入高电平HIGH或低电平LOW,对应电机A停止转动
调速就是改变IN1、IN2高电平的占空比(需拔掉ENA处跳帽)
2. IN3 & IN4 电机驱动器B的输入引脚,控制电机B转动及旋转角度
IN3输入高电平HIGH,IN4输入低电平LOW,对应电机B正转
IN3输入低电平LOW,IN4输入高电平HIGH,对应电机B反转
IN3、IN4同时输入高电平HIGH或低电平LOW,对应电机B停止转动
调速就是改变IN3、IN4高电平的占空比(需拔掉ENB处跳帽)
输出引脚
1. OUT1 & OUT2 电机驱动器A的输出引脚,接直流电机A或步进电机的A+和A-
2. OUT3 & OUT3 电机驱动器B的输出引脚,接直流电机B或步进电机的B+和B-
调速控制引脚
1. ENA 电机A调速开关引脚,拔掉跳帽,使用PWM对电机A调速,插上电机A高速运行
2. ENB 电机B调速开关引脚,拔掉跳帽,使用PWM对电机B调速,插上电机B高速运行
L298N 电机驱动直流电机原理图
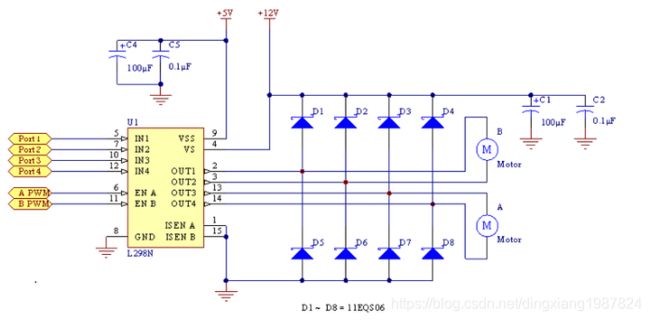
OUT1、OUT2和OUT3、OUT4之间分别接两个直流电机Motor1、Motor2,IN1、IN2、IN3、IN4引脚从单片机接入控制电平,控制电机的正反转,ENA、ENB接控制使能端,控制电机调速,L298N控制逻辑关系图如下:

关于电机调速这块,采用PWM调速,其原理是就是开关管在一个周期内电的导通时间为t,周期T内,则电机两端的平均电压U=Vcc*(t/T)=a Vcc。其中a=t/T,也称占空比,Vcc是电源电压,电机的转速与电机两端的电压成正比,而电机两端的电压与控制波形的占空比成正比,因此电机的速度与占空比成比例,占空比越大,电机转速越快,详细可看文末:电机驱动原理调速PWM。
附一张L298N电机驱动板 + 直流电机控制接线图

关于L298N+Arduino+直流电机控制(前进、后退、停止、调速)以及接线方式这块,由于内容涉及太多,此处不予展开,后面将独立一个章节发出来。
L298N 电机驱动版规格参数
- 驱动电机芯片:L298N双H桥直流电机驱动芯片
- 驱动供电范围:5V~35V ;如需板内取电,则供电范围7V~35V
- 驱动峰值电流:2A
- 逻辑部分端子供电范围:5V~7V(可板内取电5V)
- 逻辑部分工作电流范围: 0~36mA
- 控制信号输入电压范围:
低电平:-0.3V≤Vin≤1.5V
高电平: 2.3V≤Vin≤Vss - 使能信号输入电压范围:
低电平:-0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效) - 最大功耗:20W(温度T=75℃时)
L298N 电机驱动原理
电机驱动板可以通过如下两种方式对直流电机的速度和旋转方向进行控制
- H 桥 – 控制电机旋转方向(前进、后退、停止)
- PWM – 控制电机速度
H桥

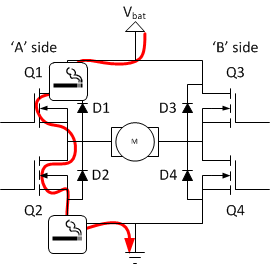
这里有四个开关Q1,Q2,Q3,Q4,另外还有一个直流电机M,D1,D2,D3,D4是MOS-FET的续流二极管,桥顶端连接到电源V(电池),底端接地。
H桥 ,英文名H-Bridge,也算是一个经典的直流电机控制电路,电路包含四个开关、晶体管(BJT或MOSFET)、负载处于中心,电机位于中心,形成H形结构,可以通过同时激活两个特定的开关来改变电流的方向,从而实现对电机的旋转方向进行控制。
输入IN1、IN2、IN3和IN4引脚实际上控制L298N 电机驱动板内部的H桥电路开关,至于为什么要叫H桥,因为电路形状长得比较像大写字母H,因故得名。

H桥电机控制 - 正转

H桥的基本工作电路非常简单:如果Q1和Q4打开,则电动机的左引线将连接到电源,而右引线则接地, 电流开始流过电机,电机向正方供电,电机轴开始向前旋转。
H桥电机控制 - 反转

如果Q2和Q3打开,电机反向通电,产生反向电流,电机轴将开始向后旋转。
在H桥中电路中,永远不要尝试同时关闭Q1和Q2(或Q3和Q4), 如果这样做的话,电源V和GND之间就会形成一条低电阻回路,导致电源短路,这种情况下会击穿电路,对电路中的电子元器件产生致命的损坏。
这里列一下所有H桥及A侧、B侧所有电源开关的开闭组合

PWM 调速
PWM,全称:Pulse Width Modulation,俗称脉冲宽度调制,是一种对模拟信号电平进行数字编码的方法,由于计算机不能输出模拟电压,只能输出0或12V的的数字电压值,我们就通过使用高分辨率计数器,利用方波的占空比被调制的方法来对一个具体模拟信号的电平进行编码。PWM 信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么是12V(ON),要么是0V(OFF)。
电压或电流是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。
- 通的时候 是直流供电被加到负载上的时候,
- 断的时候 是供电被断开的时候。
只要带宽足够,任何模拟值都可以使用PWM 进行编码,另外占空比通常以百分比表示,占空比分别为0%,25%,50%,75%和100%。

PWM通俗的讲就是通过占空比的方式来改变平均电压,从而使电机的转速发生改变,那么PWM如何生成呢?大家可以利用Arduino 开发语言提供的模拟函数:analogWrite 输出PWM波,取值区间0-255,关于这块,后续再专门整理一章独立来写,万字长文啊,手麻了,今天就到这了哈…
术语解释
- VCC:C =circuit 表示电路的意思, 即接入电路的电压
- VSS :S =series 表示公共连接的意思,通常指电路公共接地端电压
- VDD:D=device 表示器件的意思, 即器件内部的工作电压
- GND:Ground,电源的负极
- VBAT:当使用电池或其他电源连接到VBAT脚上时,当VDD 断电时,可以保存备份寄存器的内容和维持RTC的功能。如果应用中没有使用外部电池,VBAT引脚应接到VDD引脚上
PS:
另外如果大家有好的想法,意见都可以反馈,反馈账号:datazhen 只要你敢敢➕,我都在哈,会不定期的直播、更新、普惠新人哦
期间分享的视频、文章或相关话题小主们感兴趣的话,可以点赞、关注、收藏、转发或留言、亦或回复,丢空看见了会及时答复粉丝的…毕竟码了这么多字,敲起来手麻,大家也都多关照、关照哈…