Large-scale cluster management at Google with Borg
众所周知,Borg是Kubernetes的前身,了解Borg的设计思路及其对Kubernetes架构的影响,对我们更好地使用K8S,或在K8S的基础上进行二次开发都是大有裨益的,甚至在设计类似的分布式系统时也能有所启发。本文由Google在2015年正式发表,拜读后把它翻译了给大家分享,有不恰当的地方还望大家积极指正。
Borg论文全文地址在这里: https://static.googleusercontent.com/media/research.google.com/zh-CN//pubs/archive/43438.pdf,论文原名Large-scale cluster management at Google with Borg,中文翻译过来就是Google使用Borg进行大规模集群管理。

目录
摘要
1. 介绍
2. 用户角度
2.1 Workload(工作负载)
2.2 Clusters and cells(集群和单元)
2.3 Jobs and tasks(作业和任务)
2.4 Allocs(分配)
2.5 Priority, quota, and admission control(优先级,配额和准入控制)
2.6 Naming and monitoring(命名和监控)
Borg architecture(Borg架构)
3.1 Borgmaster
3.2 Scheduling(调度)
3.3 Borglet
3.4 Scalability(可拓展性)
4. Availability(可用性)
5. Utilization(利用率)
5.1 Evaluation methodology(评估方法)
5.2 Cell共享(Cell sharing)
5.3 大型cells(Large cells)
5.4 细粒度的资源申请(Fine-grained resouce requests)
5.5 资源回收(Resource reclamation)
6. Isolation(隔离)
6.1 安全性隔离(Security isolation)
6.2 性能隔离(Performance isolation)
7. Related Work(相关工作)
8. Lessons and future work(经验和未来的工作)
8.1 经验:坏的一面
8.2 经验:好的一面
8.3 结论
摘要
Google Borg是一个横跨多个集群(单个集群的机器数可达数万台),运行着成百上千不同应用任务的集群管理系统。 它通过进程级别的性能隔离,将准入控制,高效的任务打包,超卖以及机器资源共享,糅合在一起以达到高利用率。它还具有最小化故障恢复时间,降低相关故障概率的调度策略等运行时特性,来支持应用的高可用。Borg提供了声明式的作业规格语言,命名(域名)服务集成,实时作业监控等系统行为分析与仿真工具来简化用户的工作。 我们将对Borg的系统架构,特性,重要的设计决定,定量的决策分析和定性的测试分析,及过去十余年间的实践经验进行一个总结。
1. 介绍
我们内部称之为Borg的集群管理系统,管理,调度,启动,重启并监视了所有的Google应用。本文将解释它如何实现。 Borg提供了三大好处:(1)隐藏了资源管理和故障处理的细节,因此它的用户可以专注应用开发。(2)本身即高可靠/高可用,在其之上运行的应用亦是。(3)将我们的工作负载高效地运行在成千上万的机器上。Borg并不是第一个解决此类问题的系统,但它是极少数能够以如此高弹性和高完成度处理这种规模的系统之一。本文将围绕这些主题,通过我们十余年的经验得出一些定性的结论(观察)。
2. 用户角度
Borg的用户是Google应用及服务的开发者或SRE。用户以作业 (jobs) 的形式提交他们的任务 (task) ,每个job由一个或多个的二进制程序组成。每个job运行在单个Borg cell 上:作为最小单元被管理的一些机器的集合。本章节将描述Borg暴露给用户视角的一些主要特性。
2.1 Workload(工作负载)
Borg cell主要运行着两大异构的工作负载。第一部分是长时运行的服务(在线任务),主要处理短时且延迟敏感的请求(从几微秒到几百毫秒不等)。这些服务面向终端用户,例如Gmail,Google Docs,Google search,也用于内部的一些基础设施服务,例如BigTable。第二部分是处理时长从几秒到几天不等的批处理任务(离线任务),这些任务对短期的性能波动并不敏感。不同cells之间运行的工作负载差异很大,主要依赖于它们的租户(某些cell的批处理任务高度密集),并且在时间维度上这些任务的差异也非常大:批处理任务来来去去,而很多面向终端用户服务的调用高峰在日间。Borg需要平等地处理这些场景。
一个代表性的Borg 中工作负载的例子是一个公开的2011年5月整月的记录数据集,它已被充分分析。
过去几年已经有很多应用框架在Borg之上被建立起来了,包括我们内部的MapReduce,FlumeJava,MillWheel,Pregel等。这些中的大多数都有一个控制器来提交主job和一些工作job,其中MapReduce和FlumeJava扮演了与YARN的应用管理器相似的角色。我们的分布式存储系统GFS,以及它的后继CFS,还有BigTable,Megastore都跑在Borg上。
在此文中,我们把高优先级的Borg job划分为"production (prod) job",其余为"non-production (non-prod) job"。在一个具有代表性的cell中,prod jobs占据了大约70%的CPU资源以及大约60%的CPU利用率,同时占据了55%的总内存和85%的内存利用率。
2.2 Clusters and cells(集群和单元)
同一个cell里的机器都属于单个 集群 ,通过数据中心级的高性能网络光缆连接在一起。一个集群存活在单个数据中心的建筑中,多个建筑构成了一个站点。一个集群通常只有一个cell,但是可能会有一些小型的用于测试的cell和其他有特殊用途的cell。我们竭尽所能地避免任何的单点故障。
我们除去测试cell之后的中心cell规模大约有1万台机器,甚至有些更大。一个cell中的机器在多个维度都是异构的:大小(CPU,RAM,硬盘,网络),处理器类型,性能和IP地址的容量或闪存介质。Borg通过这些维度的差异将不同用户隔离开来并决定task被分配到哪个cell上运行,获取资源,安装程序及其依赖,监视它们的健康状况,并在他们异常退出时重启。
2.3 Jobs and tasks(作业和任务)
一个Borg job的属性包括名字,拥有者和它所包含的task数目。Jobs可以通过 约束 去强制它的tasks运行在包含特定 属性 的机器上,比如处理器架构,OS版本或是一个外网IP地址。约束可以是硬性的也可以是弹性的。弹性的指可以作为偏好设置而不是硬性需求。一个job的可以延迟到前一个job结束才启动,一个job只能运行在一个cell中。
每个task会映射到运行着容器的Linux进程集合中。绝大部分的Borg工作负载不运行在虚拟机上,因为我们不想承担硬件虚拟化的开销。并且,这个系统是在我们很多处理器没有支持虚拟化的时候设计的。
Task也有自己的属性,比如资源需求和它在job中的索引。同一个job中的大多数task有着相同的属性,但也可以被新值覆盖,例如特定任务的命令行参数。各个资源维度(CPU核数,RAM,硬盘空间,硬盘读写速率,TCP端口等)都被独立地指定。Borg程序为了减少对运行时环境的依赖,都采用静态链接,并且被组织成由二进制程序和数据文件组成的 包 ,它们的安装都由Borg负责。
用户通过调用RPC来操作jobs,RPC通常通过命令行工具,由其他Borg job或是监控系统来发出。大多数job的描述通过声明式配置语言BCI完成。BCI是GCL的变种,它会生成protobuf文件并通过Borg专有的关键字来拓展。GCL提供lambda函数进行计算,可以被应用用来调整配置以适应环境。有数万的BCL文件超过1k行,累计已经超过1千万行的BCL。Borg job的配置和Aurora配置文件有很多相同之处。 图2展示了jobs和tasks在其生命周期内的状态转移。

用户可以通过向Borg推送一份新的job配置文件来更改一个正在运行job中的部分或所有task,并且命令Borg将task 更新 到最新。这些是一种轻量级的,非原子性的事务操作,那么它们在被关闭(提交)之前当然也可以轻易撤销。更新通常是滚动执行的,而且可以限制由更新导致的任务中断(被重新调度或抢占)的数量;超过限值后,任何将导致中断的改动都会被跳过。
一些task的更新操作(例如推送一个新的二进制文件)总是会触发重启,一些(例如对资源的需求数增长或改变了约束)会使得task不再适应于当前的机器,然后导致它被停止然后重新调度,还有一些(例如更改优先级)可以无需重启或移动。
Task可以请求在被kill之前通过Unix SIGTERM信号机制得到通知,从而有时间完成扫尾,保存状态,结束当前正在执行的请求并拒绝新请求等操作。如果抢占者设置了延迟上限那么有些通知将来不及发出。实践中,80%的情况下能发出通知。
2.4 Allocs(分配)
Borg上的 Alloc 是为一个或多个task运行的预留资源。不管有没有被使用,这些资源都被分配出去了。Alloc能为未来的task预留资源,在停止task与重启task之间保留资源,并能将不同job的task聚集到同一台机器上 —— 举个例子,一个web服务实例,以及一个与之关联的写log任务(将本地服务器的URL日志从本地磁盘复制到分布式文件系统中)。Alloc像机器一样对待其管理的资源,多个运行在同一Alloc内的task共享其资源。如果一个Alloc需要被迁移到其他机器,那么从属于它的task都会被重新调度。
一个 Alloc集合 就像一个job:它是在一组在多台机器上预留了资源的allocs。一旦一个Alloc集合被创建,一个或多个job就可以被提交并运行。为了简洁起见,我们通常用"task"指代一个Alloc或一个顶级task(独立于alloc),用"job"指代一个job或是Alloc集合。
2.5 Priority, quota, and admission control(优先级,配额和准入控制)
当更多可被容纳的工作出现时(注:即超过了系统的负载能力)会发生什么?我们的解决方案是引入优先级和配额。
每个job都有 优先级 ,一个正整数。一个高优先级的task可以通过牺牲低优先级的task来获取资源,甚至可以抢占(杀死)后者。Borg为不同的用途定义了不重叠的 优先级区间 ,包括(降序): 监控(monitoring),生产(production),批处理(batch),尽力而为(best effort)(测试或免费程序) 。在本文中,prod jobs指的就是监控和生产区间。
尽管一个被抢占的task通常会被重新调度到cell的某个机器上,级联抢占还是可能发生:例如当一个高优先级task抢占了一个稍低优先级的task,而这个task又抢占了更低优先级的另一个task。为了避免这样的情况,我们禁止production区间内的task之间进行抢占。细粒度的优先级划分在别的情况下也同样有用。例如MapReduce的master上的task比worker节点上的task优先级稍高一些,为的就是提高master的可靠性。
优先级反映了cell中正在运行或者正在等待的job的重要程度,而配额(Quota) 被用于调度哪个job 准入 。在一段时间内(通常是数月),配额用一个资源向量(CPU,RAM,硬盘等)来表示某时用户的job可以请求的最大资源(例如,在cell xx,prod优先级下,20TB的RAM,直到7月底)。配额检查是准入控制的一部分,而非调度时:当job的配额不足时会在提交时被立刻拒绝。
高优先级的配额比低优先级的配额开销更大。Production级别的配额会被cell中的实际可用资源所限制,所以当一个用户提交了production优先级的job且此job满足配额时,它一定可以运行。尽管我们鼓励用户按需购买配额,很多用户还是会超买以防未来应用基数增长时将要面临的资源短缺。我们对低优先级的配额进行超卖来应对这样的情况,这意味着当优先级为0时用户有无限的配额,尽管这实际上几乎无法实现。一个低优先级的job可以准入,但是因为资源不足会保持等待。
配额是Borg之外的系统处理的,并且和我们的物理容量规划密切相关,在不同的数据中心,容量规划反映出的价格和可用性都会不尽相同。用户的job只有在请求的优先级上有足够配额时才会被接收。配额的使用使得DRF这样的公平性策略变得不再必要。
Borg有一个可以为某些用户提供特殊权限的容量系统,例如,允许管理员删除或更改cell中的任意job,或者允许用户访问被限制的内核特性和禁用job资源预估这样的Borg行为。
2.6 Naming and monitoring(命名和监控)
仅仅创建和部署tasks还不够:即使tasks被迁移到了新机器上,服务的客户端和其他系统也应该能找到他们。为了实现这个特性,Borg建立了一个稳定的“Borg域名服务”为每个task命名,包括cell名,job名和task编号。Borg把一个task的主机名和端口号写入一个持久化存储且高可用的Chubby文件中,这被RPC系统用来找到task的终端(真实所在的位置)。BNS域名也构成了task的DNS域名的基础,例如,cell cc中urban用户的名为jfoo的job下的第50个task会被命名为50.jfoo.ubar.cc.borg.google.com。当job的大小和task的健康状况改变时,Borg会写入Chubby,因此负载均衡方可以决策将请求路由到哪里。
几乎所有运行在Borg之下的task都会包含一个内置的HTTP服务,它会发布task的健康信息以及数千的性能指标(例如,RPC延迟)。Borg通过健康检查URL监控task并对那些没有及时相应或返回了HTTP错误码的task进行重启。其他数据会被监控工具跟踪并展示在仪表盘上,并对未达SLO的服务进行报警。
一个被称为Sigma的服务提供了基于web的用户界面(UI),用户可以检测他们所有job的状态,或是一个特定的cell,或者深入研究独立jobs和tasks的资源状况,日志细节,执行历史和最终结果。我们的应用会产生大量的日志,它们会自动的轮转以防用尽磁盘空间,并且在退出后会保留一段时间,为了辅助调试。如果一个job没有处于运行中,Borg会提供一个"why pending?(为什么挂起)"的注解,以及一个如何修改job的资源需求以更好适配cell的指引。我们发布了一个“符合”资源形态使得调度更加容易的指南。
Borg会把所有的job提交记录和task事件,以及每个task尽可能详细的资源使用信息记录在Infrastore上,Infrastore是一个可扩展的只读数据存储,通过Dremel提供了类SQL的交互式接口。这些数据被用来支持基于使用量的收费,调试job和系统错误以及长期的容量规划。它也为Google集群的工作负载追踪提供了数据。 所有的这些特性帮助用户理解Borg的行为,调试job,协助SRE可以独立管理成千上万的机器。
Borg architecture(Borg架构)
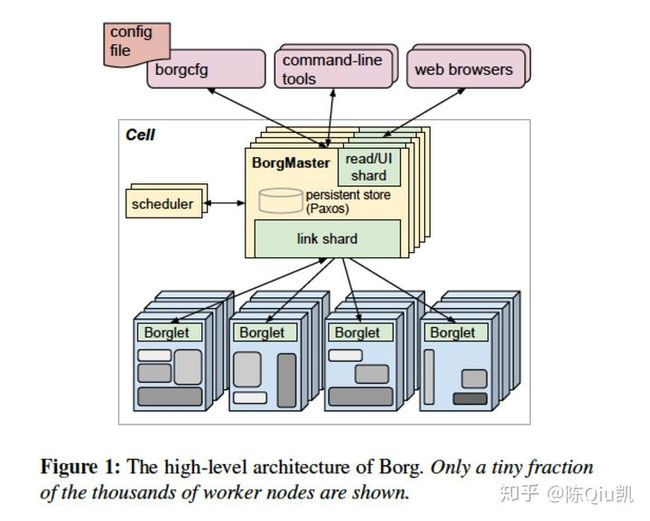
一个Borg cell由一些机器,一个被称为Borgmaster的逻辑上的中心控制器,以及一个被称为Borglet的运行在cell的每台机器上的一个代理进程组成。Borg的组件都是用C++写的。
3.1 Borgmaster
每个cell的Borgmaster都由两个进程构成:一个主进程和一个独立的调度进程。Borgmaster的主进程处理来自客户端的RPC请求,如修改状态(例如创建job),提供只读的数据访问(例如查询job)。它还管理了系统中所有对象(机器,tasks,allocs等)的状态机,通过Borglets的通信,并提供一个web UI作为Sigma的备份。
Borgmaster逻辑上是一个单进程,但实际上有5个副本。每个副本在内存中维护了一份cell中大多数状态的拷贝,并且这个状态会被记录在一个高可用,分布式且基于Paxos的存储中(副本的本地硬盘上)。每个cell上仅有一个 选举出的master ,同时作为Paxos集群的leader和状态的修改者,处理所有改变cell状态的操作,例如提交一个job或终止一台机器上的某个task。当一个cell启动或之前选举出的master宕机了,都会触发一次master节点的选举(利用Paxos协议),新的master会获取一个Chubby锁,这样别的系统就能找到它。选举一个新master并把故障转移通常需要10s,但是在一个大型cell中耗时也能高达1分钟,因为内存中的状态需要被重新构建。当一个副本从宕机中恢复过来时,它会动态地从其他最新的Paxos副本中重新同步它的状态。
Borgmaster某个时间点的状态被称为检查点(checkpoint),以定期的快照(snapshot)加上改动日志的形式持久化在Paxos存储中。检查点有很多用途,包括恢复过去任意一个时间点的Borgmaster的状态(例如,把时间点设为接受某个触发软件缺陷的请求之前,这样可以用于调试); 极端情况 下可以手动修复它;构建事件的持久化日志用于未来的查询;还有离线仿真。
一个叫作Fauxmaster的高保真Borgmaster仿真器被用来读取检查点文件,并且包含了一份完整的线上Borgmaster代码,还有Borglets的存根接口。它接收RPC请求去改动状态机,并执行类似“调度所有挂起的task”这样的操作。我们还用Fauxmaster来调试故障,把它当做一个真实的Borgmaster来与它交互,用模拟的Borglets从检查点文件中重放真实的交互操作。用户可以进入系统一步一步观察过去发生的状态改变。Fauxmaster对于容量规划也很有帮助(多少同样类型的新job会合适?),还有在对cell的配置改动之前进行可行性检查(这样的改动会导致任何重要的job不可用吗?)
3.2 Scheduling(调度)
当一个job被提交时,Borgmaster会将它持久化在Paxos的存储中,并且将job里的tasks加入 挂起(等待)队列 中。 调度器 会异步地扫描队列,如果有足够的资源且符合job的约束,它会将tasks赋给机器。(调度器主要操作tasks而不是jobs)。扫描会遵循从高到低的优先级,同一级别优先级下的会采用轮转法来保证不同用户之间的公平性,以避免队首大型任务阻塞。调度算法包括两个部分: 可行性检查(feasibility checking) ,找到task可以运行的机器集合,和 评分(scoring) ,从可行的机器中选择一台。
在可行性检查中,调度器找到满足tasks约束并且有足够多可用资源的机器集合(包括那些可以从低优先级任务中抢夺过来的资源)。在评分阶段,调度器会判断每个可行机器的质量。评分考虑了用户指定的一些偏好,但是主要还是由内置的标准驱动,例如最小化被抢占任务的优先级和数量,选择已经有任务安装包的机器,使任务分散在不同能耗和故障域之间,以及整合质量(在单台机器上混合高低优先级的tasks使得高优先级任务可以在负载突刺时扩容)等。
Borg之前使用E-PVM算法用来评分,E-PVM对异构资源生成一个成本值,最小化部署一个任务的成本。在实践中,E-PVM将负载传播到了所有的机器上,为负载突刺留出了资源——但代价是增加了资源碎片,尤其是对需要占据一台机器大部分资源的大型task来说。有时候我们称之为“最差匹配(worst fit)”。
与之相反的是“最佳匹配(best fit)”。“最佳匹配”尽可能的将任务填满机器。这使得某些机器没有在运行用户的job(但仍然运行着存储服务),因此部署大型任务就会非常直接,但是如果Borg或用户误判了资源的需求,这样紧实的任务整合策略会导致性能受损,当有突发的高负载时会损害应用,尤其是对指定了低CPU需求的批处理job有负面影响,它们本应能轻易被调度并且抓住机会使用空闲的资源:20%的non-prod优先级的tasks只请求了少于0.1核的CPU。
我们当前的评分模型是一个混合模型,力图减少搁浅(stranded)资源的数量——搁浅资源指的是某些因为其他类型的资源被饱和分配了而不能使用的资源。它比最佳匹配模型高出了大约3-5%的整合效率。
如果在评分阶段被选中的机器没有足够的可用资源去匹配新task,Borg会 抢占(杀死) 更低优先级的tasks,优先级从低到高直到有足够的可用资源。我们将被抢占的tasks加入调度器的挂起队列中,而不是将它迁移或休眠。
Task的启动延迟(从job提交到task运行所经历的时间)是我们持续关注的重点。它是一个变化很大的值,中位数大约为25s。包的安装大约占据了总时间的80%:一个已知的性能瓶颈是不同的包在写入本地硬盘时会产生竞争。为了减少task的启动时间,调度器更倾向于把task赋给已经有必要安装包(程序和数据)的机器:大多数的安装包是只读的因此可以被共享和缓存。(这是Borg调度器唯一支持的一种数据局部化形式。)除此之外,Borg利用树形结构和类似torrent的协议并行地把包分发到不同机器上。 此外,调度器使用了一些技术使得它可以扩展到包含数万台机器的cell中。
3.3 Borglet
Borglet是存在于cell的每台机器上的本地Borg代理。它被用来启动和停止tasks,重启失败的task,通过内核调用来管理本地资源,滚动调试日志,并且向Borgmaster和其他监控系统报告机器的状态。
Borgmaster每隔几秒会轮询每个Borglet来获取机器的当前状态并发送请求。这使得Borgmaster可以控制通信的速率,避免了复杂的流量控制机制,且防止了恢复风暴。
选举出的master节点负责准备发往Borglet的消息,并根据他们的响应更新cell的状态。为了性能的可拓展性,每个Borgmaster的副本运行着一个无状态的 链接分片(link shard) 去处理和某些Borglet的通信;只要新的选举发生,这样的分区就会被重新计算。为了弹性,Borglet会一直报告它的完整状态,链接分片会把这些信息聚合并压缩,只向状态机报告与之前的不同之处,以此减少master节点的更新负载。
如果一个Borglet对多次的轮询信息都没有作出响应,这台机器就会被标记为宕机,其上的所有task都会被重新调度。如果通信恢复,Borgmaster为避免复制的开销,会通知Borglet杀死那些已经被重新调度task。即使和Borgmaster失去联系,Borglet也会继续执行普通的操作,因此当前正在运行的task和服务会被保留就算Borgsmaster复制失败了。
3.4 Scalability(可拓展性)
我们还不知道Borg这种集中式架构的最终拓展上限在哪;至今为止,每次我们接近限制的时候都可以顺利的突破它。单个Borgmaster可以在一个cell中管理数千台机器,有些cell每分钟有超过10000的task到达。一个忙碌的Borgmaster占用10-14个CPU核数以及高达50GB的内存。我们使用了几种技术来达到这样的扩展性。
早期的Borgmaster用一个简单的同步的循环来接收请求,调度任务并和Borglets通信。为了处理更大型的cells,我们把调度器分割为独立的进程,这样它就可以和其他Borgmaster的功能并行了,并且这些功能为了容错会有副本。调度器对一份缓存的cell状态拷贝进行操作。它重复以下操作:从选举出的master节点中取回状态变更(包括被分配的和正在等待的task);更新本地拷贝;调度并分配任务;把分配的结果通知master节点。master节点会接受并且应用这些分配,除非它们不再合适(例如基于过期的状态的分配),这将导致它们等待下一轮被重新调度。这和Omega采用的乐观并发控制思路十分相似,实际上我们最近对Borg新增了根据不同工作负载类型选择不同调度器的能力。
为了改进响应时间,我们增加了线程来与Borglets通信,并且对只读的RPC调用进行响应。为了更好的性能,我们将5个Borgmaster副本对这些功能进行分片。这些举措使得99%分位数的UI响应时间低于1秒,95%分位数的Borglet轮询间隔低于10秒。 以下几方面是Borg调度器强拓展性的关键。
缓存评分 :可行性评估并对一台机器进行评分的开销是很大的,所以Borg会将评分缓存起来直到机器或task的属性改变——例如,一台机器上的一个task终止了,或是一个属性被改变了,或是一个task的需求发生变更。忽略一些少量的资源变化可以减少缓存失效。
等效类别 :Borg job中的tasks通常有相同的需求和约束,所以Borg只对 等效类别(equivalence) 的一个task进行可行性分析和评分,而不是对每一台机器上的每一个等待中的task进行可行性分析,对每一台可行的机器进行评分。(等效类别是指一组相同需求的tasks)
宽松随机化 :对一个大型cell中的每台机器计算可行性及评分是一种资源的浪费,因此调度器会乱序地检查机器知道找到足够多可行的机器去评分,并且在这个集合中选择最优的一台机器。这减少了评分的数量以及task进入/离开系统时的缓存失效,并且加速了task分配给对应机器的过程。宽松随机化类似Sparrow中的批量采样技术,但它还处理了优先级,抢占,异质性以及安装包的成本。 在我们的实验中,从零开始调度整个cell的工作负载通常会花费几百秒,但当以上技术被关闭的时候,调度3天多还没有结束。通常情况下,一个等待队列中的调度任务会在少于半秒的时间内结束。
4. Availability(可用性)

故障在大规模系统中是十分常见的。图3展示了15个cell样本中task异常退出的原因。运行在Borg上的程序应该使用诸如多副本,状态持续存储至分布式文件系统,(如果合适的话)执行快照(checkpoint)等技术来处理这些事件。即使如此,我们还是尽量地减轻这些事件带来的影响。例如,Borg会:
- 自动对退出的任务重新调度,如果有必要的话将调度到新机器上。
- 通过把一个job中的task传播至不同的可能失败域,例如不同机器,机架和供能域,来减少关联故障。
- 操作系统/机器更新期间,限制允许的任务中断的速率以及job中同时失败的task数量。
- 使用声明式预期状态表示和幂等的修改操作,这样故障的客户端就可以无损的重新提交遗漏的请求。
- 当机器不可用的时候限制tasks的重新调度速率,因为
Borg不能区分大规模的机器故障和网络分区。 - 避免造成机器::task崩溃的组合再次出现。
- 通过不断地重新执行日志保存task,把写入本地硬盘的 关键 中间数据恢复,即使与日志关联的
Alloc已经终止或转移到其他机器上了。用户可以指定系统重试的时长,通常设置为几天。
Borg的一个重要设计特性是:就算Borgmaster或task从属的Borglet退出了,正在运行的task还会继续运行下去。但是保持master节点正常运行还是十分重要,因为当它退出,新的task不能被提交,现有的task也不能被更新,故障机器上的tasks也不能被重新调度。 Borgmaster使用了一系列技术使得它在实践中的可用性高达99.99%:多副本以防机器故障,准入控制以防过负载,使用简单且贴近底层的工具来部署实例使得外部依赖最小化。每个cell都是独立于其它cell的,这样可以降低关联操作错误和故障传播的几率。同时这也是我们不愿扩大cell规模的主要原因,而不是拓展性的限制。
5. Utilization(利用率)
Borg最初的目标之一就是高效的利用好Google的大规模机器,这同时也是一笔很有意义的经济投资:提高几个百分点的利用率就能省下几百万美元。这一节将讨论Borg使用的一些策略和技术。
5.1 Evaluation methodology(评估方法)
Jobs有部署的约束,且需要处理少见的负载突刺,我们的机器是异构的,我们从服务型job回收资源来运行批处理job。因此为了评估我们的策略选择,我们需要一个比“平均利用率”更复杂的指标。在大量实验之后我们选择了 cell压缩量 :给定工作负载,我们通过不断移除机器直到当前的资源总量不足以支持工作负载,来确定一个cell需要的最小规模,从零开始重复部署此工作负载,确保我们不会被某个意料之外的配置所干扰。这提供了明确的终止条件,且促进了自动化程度,避免了生成和建模合成负载的陷阱。评估技术的定量比较可以在[78]查看:我们会发现细节令人惊讶地微秒。
利用线上的cells来进行试验是不可能的,但我们可以用线上cells的数据和工作负载,包括约束,限制,预留,数据的使用量等,通过Fauxmaster来获得高保真的仿真结果。以下的数据来自2014年10月1日14:00周三的一份Borg快照(其他快照也会提供类似的结果)。我们首先排除了用于特殊目的的,用于测试的以及小型(机器数小于5000)的cells,然后从剩下选择了15个Brog cells,抽样的结果关于cell的大小大致均匀分布。
为了在紧凑的cell中保持机器异质性,我们随机地移除机器。为了保持工作负载的异质性,我们全量保留,除了那些与特定机器关联的服务型或存储tasks(如Borglet)。对于比原cell一半规模还大的job,我们把硬性约束变为弹性约束,并且允许最多0.2%的tasks进入等待状态,这是针对那些十分“挑剔”且只能部署在少数机器上的tasks而言的;大量的实验证明结果是可复现的,并且波动很小。如果我们需要一个规模更大的cell,就在合并(压缩)之前的把原cell多克隆几倍;如果需要更多的cell,就只要克隆原cell。
每个实验都借助不同的随机数种子在每个cell上重复了11次。在图中,我们用误差条来展示所需机器的最小值和最大值,选择90%分位数作为结果 —— 平均值和中位数并不能合理反映系统管理员期望把握的工作负载。我们相信cell压缩率是比较调度策略的一个公平且一致的指标,它能被直接翻译成开销/收益;更优的策略只需更少的机器就能支撑起同样的工作负载。 我们的实验关注即时的调度(装箱),而不是重放一段长时的工作负载追踪记录。原因一是避免复制开放和闭合队列模型的复杂度,二是因为传统的“完成时间”指标并不适用于我们的环境,很多服务都是长时运行的,三是为提供清晰的比较结果,四是我们相信结果并不会差异巨大,最后是一个现实问题:我们发现单次实验消耗了200000个Borg CPU核 —— 即使以Google的规模来看,这也是一笔不小的投资。
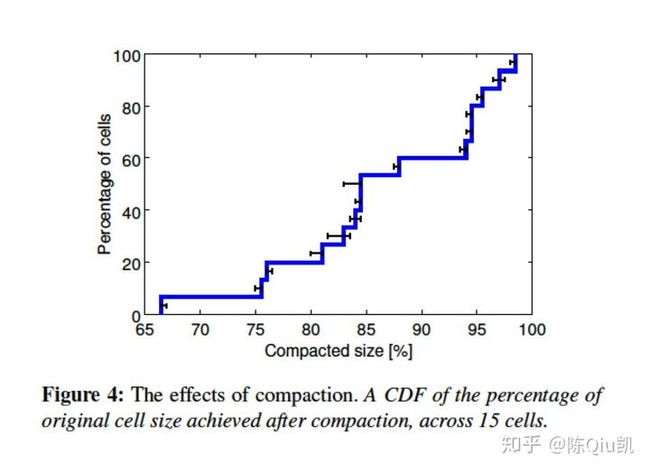
在线上,我们特意为工作负载的增长,偶然的“黑天鹅事件”,负载突刺,机器故障,硬件升级和大规模局部故障(如供电短路)保留了足够的裕度(headroom)。图4展示了如果我们执行cell合并(压缩),我们的实际cell可以有多小。图中使用这些压缩后的大小作为基准线。
5.2 Cell共享(Cell sharing)
几乎所有的机器同时运行着prod task和non-prod task:共享的Borg cells中大约有98%的机器是这样,被Borg管理的整个机器集合中大约有83%(一些cell有特殊用途)。
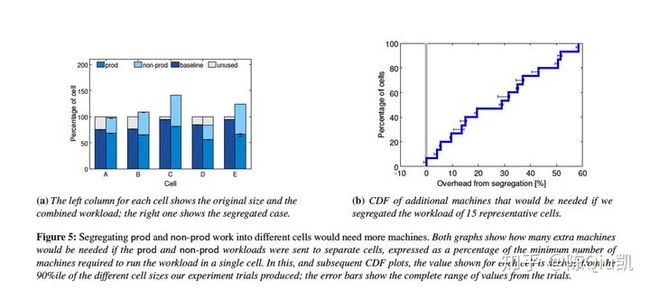
很多其他组织在独立的集群里运行面向用户的job和批处理job,我们审视了一下如果我们也这么做会发生什么。图5显示,在一个中等规模的cell上,prod job和non-prod job隔离运行的话将多需要20%-30%的机器来支撑起工作负载。因为prod jobs通常会预留一些资源来应对罕见的负载突刺,但大多数时间并不要这些资源。Borg会将这些资源回收来运行non-prod jobs,因此总体上我们并不需要那么多机器。
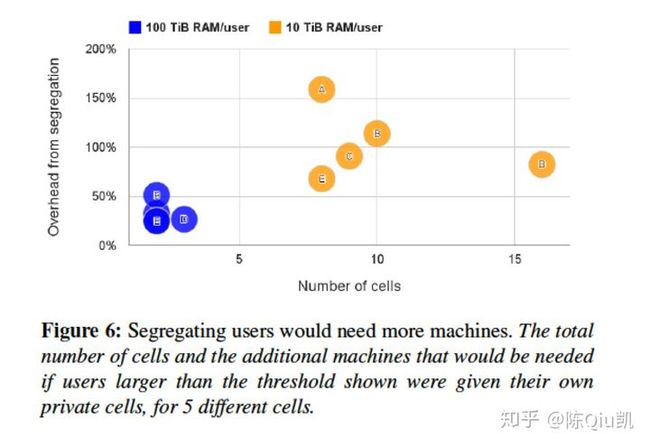
大多数的Borg cells都会被数千用户所共享。图六展示了原因。在这个测试中,如果用户的工作负载消耗了至少10TiB(或100TiB)的内存,我们就会把它切分入一个新cell。目前的共享策略看起来效果不错:即使选择更大的阈值(100TiB),我们需要2-16倍的cells和20%-150%的多余机器。池化资源能够有效节约成本。
但把无关的用户和job类型打包到同一台机器上可能会导致CPU干扰,是否会导致我们需要更多的机器进行补偿?为了弄明白,我们来看一下同种机器类型,同样的时钟速度下,CPI(cycles per instruction)是如何改变不同环境中的tasks的。在这些条件下,CPI的值是可比较的,且可以被用作性能干扰的参考量,因为成倍的CPI值对于一个计算密集型程序来说意味着双倍的运行时间。这些数据是过去一周,使用了[83]中描述的硬件分析工具,以5分钟为间隔对时钟数和指令数进行统计,从大约12000个随机选择的prod tasks收集来的,最后我们对样本进行加权平均。也许结果并不那么直观。
(1) 我们发现在同样的时间间隔下,CPI和两种测量方法正相关:CPU的总使用率和(基本独立的)tasks的数量;机器每新增一个task,其它任务的CPI就会增长0.3%(使用线性模型拟合数据的结果);机器的CPU使用率提高10%,CPI会增加不到2%。尽管这样的相关性很有统计意义,但它只能解释CPI测量中5%的变化;其他因素取决于,例如应用间的固有差异,某种特定的干扰等。
(2) 通过我们从共享cells和某些 专用 cells的多样化应用中采样到的CPI数据来看,共享cells的平均CPI为1.58(σ=0.35),专用cells的平均CPI为1.53(σ=0.32)- 即在共享cells中,CPU性能会低3%。
(3) 为了解决不同cell上的应用可能有不同工作负载,甚至是选择偏好(也许某些对冲突敏感的程序已经被迁移到专用cell上)的问题,我们会观察两种类型cell中所有运行着的Borglet的CPI。我们发现专用cells的CPI为1.20(σ=0.29),共享cells的CPI为1.43(σ=0.45),意味着专用cells的性能是共享cells的1.19倍,尽管这高估了对轻负载机器的影响,结果轻微偏向专用cells。 这些实验确认了仓库规模的性能比较是十分困难的,强化了[51]中的观测,也说明了共享的策略并没有大幅增加运行程序的开销。 尽管对我们的结果作了最保守的假设,共享依然是有益的:与显著减少几种不同分区方案中的机器数相比,CPU降速显得不足为奇,并且共享的优势还在其他的资源中有所体现,包括内存和硬盘,而不仅仅是CPU。
5.3 大型cells(Large cells)
Google为了满足运行大型计算任务和减少资源碎片的需求,建造了大型cells。我们通过对一个cell上的工作负载分区至多个更小的cells上,测试了对资源碎片的影响——对jobs随机排列,然后将它们轮转地分配给各个分区。图7显示使用更小的cells将显著地需要更多机器。

5.4 细粒度的资源申请(Fine-grained resouce requests)
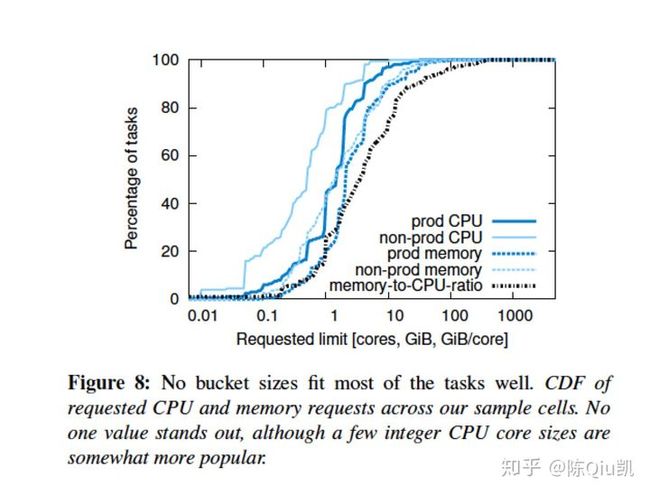
Borg的用户以毫核为单位申请CPU资源,以字节为单位申请硬盘空间和内存(一个核是一个处理器超线程(HT),为不同类型机器的性能进行了标准化)。图8显示用户充分利用了细粒度:对请求的内存量和CPU核数没有明显的“偏好点”,资源之间也没有明显的相关性。这些分布和[68]中展示的十分相似,除了我们在90%分位数上的内存请求稍微大一些。
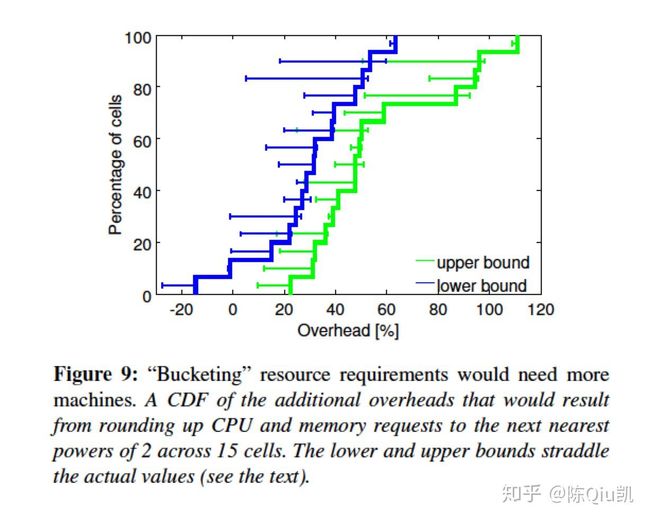
在Iaas(infrastructure-as-a-service)中普遍提供的固定尺寸的容器或虚拟机并没有很好地符合我们的需求。为了说明这一点,我们对prod jobs和Alloc的CPU核数和内存申请向上取整,取最接近的2的幂次数,最低为0.5核/1G RAM。图9显示这样的做法通常需要30-50%更多的资源。上界来自于即使将压缩前的原cell的尺寸扩大四倍仍无法满足资源需求的大型tasks,只得为它们分配一整台机器;下界来自于允许tasks进入挂起等待状态(这比[37]中将近100%的额外开销要少一些,因为我们支持不仅4种buckets,且允许CPU和RAM容量独立缩放)。
5.5 资源回收(Resource reclamation)
Job可以指定资源申请的 上限(Limit) 。Borg利用资源上限来确定用户是否有足够配额准许job运行,并确定是否有某台特定的机器有足够的空闲资源来调度此task。就像有些用户会购买超出需求的配额一样,有些用户会请求超出他们的tasks使用的资源,因为Borg通常会杀死一个实际的RAM或硬盘空间使用量超出它请求量的task,或压制CPU以不超过它的申请值。除此之外,有些tasks只是偶尔需要使用它们的资源(例如在一天中的负载峰值或遭受了拒绝服务攻击),但大多数时候并不用。
与其浪费那些已申请但当前未被消费的资源,我们会对一个task的资源用量进行评估,并回收剩余的资源,供那些对资源质量要求并不那么高的任务使用,例如批处理jobs。这整个过程叫做 资源回收(resource reclamation) 。评估的结果叫 预留(reservation) ,Borgmaster每隔几秒便会利用从Borglet捕获的细粒度 使用率(资源消费),对预留值进行计算。最初的预留值被设为资源的请求量(即资源上限),300s的启动阶段之后,预留值会缓慢下降到实际用量加上安全余量。当实际用量超过它时,预留值会迅速上升。
Borg调度器使用资源上限来计算prod tasks(高优先级,时延敏感)的可行性,所以prod tasks从来不依赖资源回收,也和资源超卖无关;对于non-prod tasks,它们使用现有运行tasks的预留值,因此新task可以利用这些被回收的资源进行调度。
如果预留值(预测值)出错,机器可能在运行时耗尽资源——即使所有tasks的使用量都低于它们的上限。如果有这样的情况发生,我们会杀死或者压制non-prod tasks,但永远不会是prod tasks。

图10显示,如果没有资源预留,会需要很多额外的机器。在一个中等规模的cell中,大约有20%的工作负载运行在被回收的资源中。
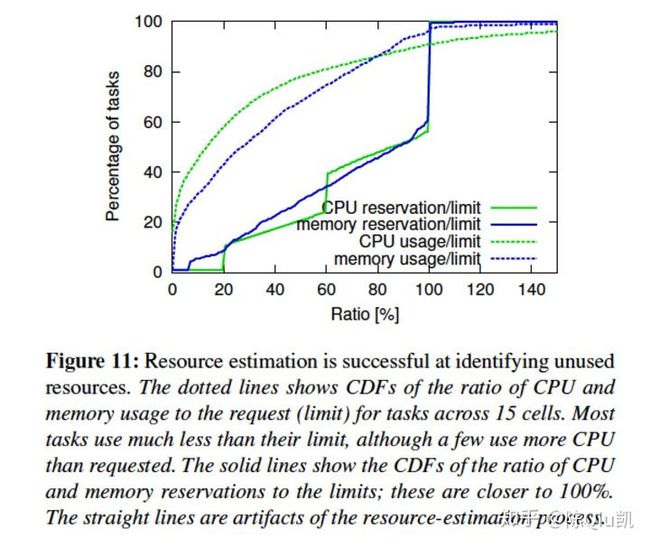
图11可以看到更多的细节,展示了预留值与使用上限的比。一个超出内存限制的task,如果它的资源被其他task需要,不管优先级有多高它都会首先被抢占,所以极少有task会超过它的内存限制。另一方面,CPU很容易被压制,因此短期的突刺会让使用量超出预留值,却不会有什么损害。 图11表明资源回收可能不必要地保守了:预留值和使用量之间有足够的浮动空间。为了测试这点,我们选择一台线上的cell,并调整了它的资源评估算法,在一周的时间内以减少安全余量的方式使其更 激进 ,接着下一周在基准线和 激进 设置之间选择一个 适度 的设置,最后一周恢复到基准线。
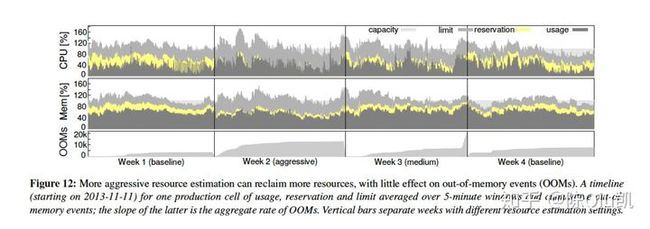
图12显示发生了什么。在第二周,预留值明显和真实使用量更接近,比第三周稍低一些,最显著的差距在第一周和第四周。如预期,内存溢出(OOM)事件的发生速率在第二和第三周略微增长。回顾这些结果之后,我们认为利大于弊,并把同样的适度策略的资源回收参数应用到了其他cell上。
6. Isolation(隔离)
50%的机器都运行着9个及以上tasks:一个处于90%分位数的机器大约有25个tasks,且运行着大约4500个线程[83]。尽管在应用之间共享机器提高了利用率,但它需要一种合适的机制来防止tasks(实质是进程)之间的干扰。这适用于安全性和性能两个方面。
6.1 安全性隔离(Security isolation)
我们使用Linux的 chroot 作为同一机器上多个tasks之间主要的安全性隔离机制。过去为了支持远程调试,当机器在为某个用户运行task时,我们会通过自动分发(及废除)ssh密钥的方式给予用户访问对应机器的权限。对于大多数用户,现在这种方式已经被borgssh命令取代了,borgssh会与Borglet一起向目标task所在的chroot和cgroup,用shell构建起一个ssh连接,更严格地锁定访问权限。 虚拟机(VM)和安全沙箱技术被用来在Google的AppEngine(GAE)和ComputeEngine(GCE)运行外部软件。宿主机上的虚拟机以KVM进程的形式运行一个Borg task。
6.2 性能隔离(Performance isolation)
早期版本的Borglet采用了相对原始的资源隔离手段:事后检查内存,硬盘空间和CPU使用量,对那些过量使用内存或硬盘的tasks进行统一的终止,并降低过量占用CPU使用的tasks的Linux CPU优先级。不过一些粗暴的tasks还是很容易影响到同一机器上其他tasks的性能,因此有些用户夸大了他们的资源请求量以使Borg减少与其同寸的tasks数目,这间接减少了利用率。资源回收可以夺回剩余的一些资源,但毕竟有限,因为涉及到安全裕度。在极端场景下,用户还会申请使用专用的机器或cells。
现在,所有的Borg tasks都运行在基于Linux cgroup的容器中,Borglet直接操作容器的设置,有了OS内核的帮助,极大地提升了控制能力。即使如此,低阶的资源冲突还是会发生(例如内存带宽或L3缓存污染),就像[60,83]。 为了解决过载和过售,Borg tasks有一个应用类别 (appclass) 属性。最重要的区别在于延时敏感任务 (latency-sensitive, LS) 类型和其他被称为批处理 (batch) 的任务。LS tasks指面向用户的应用以及需要快速响应请求的共享基础设施服务。高优先级的LS tasks最先被优待,为此可以暂时挂起批处理tasks几秒。
第二个区别在于: 可压缩的 资源(例如CPU使用量,硬盘I/O带宽)是基于速率的,可以通过降低task的服务质量而不杀死它来回收资源; 不可压缩的 资源(例如内存,硬盘空间)只能杀死task来回收。如果某台机器用尽了不可压缩资源,Borglet会依据优先级从低到高终止tasks,直到剩余的预留量满足需求。如果某台机器用尽了可压缩资源,Borglet会限制资源使用量(偏好LS tasks),这样不用杀死任何tasks就可以应付短时的负载尖峰。如果情况没有改善,Borgmaster会从机器上移走一个或多个task。
Borglet有一个用户态的控制循环,它负责以下工作:为容器分配内存,prod tasks基于未来使用量的预测值,non-prod tasks则基于内存压力;处理来自内核的内存溢出 (OOM) 事件;当task尝试分配超出它们内存限制的内存时,或某台超售的机器确实耗尽了内存,则杀死这些任务。Linux激进的文件缓存机制加大了我们实现的复杂度,因为需要对内存精确计算。 为了提高性能隔离的效果,LS tasks可以完全占有一个物理核,并阻止其他LS tasks使用。批处理tasks可以在任意一个核上运行,但相对于LS tasks,它们只有很少的调度额度。Borglet动态地调整贪婪LS tasks的资源上限,以保证它们不会长久(数分钟)挂起批处理tasks,必要时会有选择性的应用CFS带宽控制[75];份额总是不够的,因为我们有多种优先级级别。
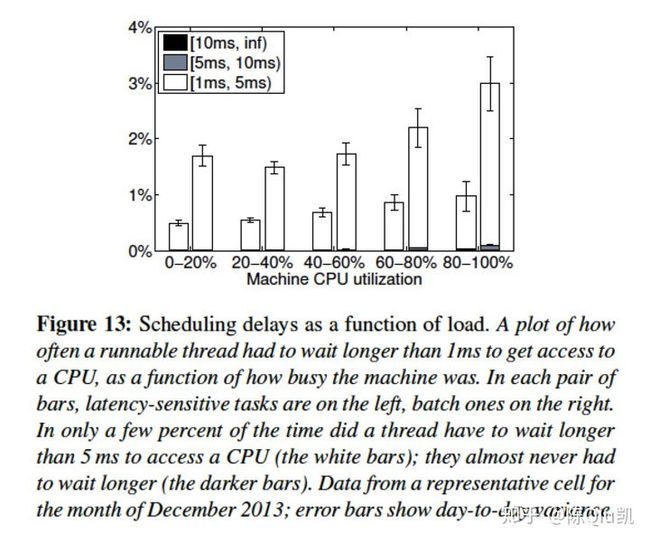
像Leverich,我们发现标准Linux CPU调度器(CFS)需要实质性的调整来同时支持低延迟和高利用率。为了减少调度延迟,我们的CFS版本对cgroup作了拓展,使得每个cgroup都有自己的加载历史[16];允许LS tasks抢占批处理tasks;当多个LS tasks在一个CPU上都可运行时减少了调度量。幸运的是,我们的多数任务使用了“为每个请求创建一个处理线程”(thread-per-request)的模型,这减轻了持续的负载不均衡。我们保守地使用 cpusets 为有特定延迟要求的应用分配CPU核。以上工作的结果展示在了图13。这方面的工作还在继续,我们正在加入支持NUMA超线程,感知功耗的线程管理和CPU管理,并提升Borglet的控制精确度。 Tasks可以消费其规定上限内的资源。大多数任务还被允许消费超出上限的可压缩资源,如CPU,以利用好空闲(slack)资源。只有5%的LS tasks关闭了这一特性,大概是为了更好地可预测性;少于1%的批处理tasks同样关闭了。默认情况下不允许使用空闲内存,因为会增加task被杀死的几率,但即使如此,10%的LS tasks和79%的批处理tasks覆盖了这一设置,因为这是MapReduce框架的默认行为。以上对资源回收的结果作了补充。批处理tasks乐意随机的使用空闲和被回收的内存:大多数时候这能奏效,但LS tasks紧急需要资源时批处理tasks会被牺牲。
7. Related Work(相关工作)
资源调度已经被研究了几十年,在多个领域都有了应用,如广域高性能计算 (wide-area HPC supercomputing Grids) ,工作站网络 ((networks of workstations)) 、和大规模服务器集群 (large-scale server clusters) 等。这里我们只关注大规模服务器集群的相关工作。 最近的一些研究分析了从Yahoo!, Google, Facebook[20,52,63,68,70,80,82]获取的集群追踪数据,说明了这些现代数据中心和工作负载固有的规模和异质性带来的挑战。包含了集群管理架构的分类。
Apache Mesos 使用一种基于供应 (offer-based) 的机制,把资源管理(类似移除调度器的Borg)和部署功能切分至中心资源管理器与多种框架(如Hadoop,Spark)之间。Borg使用一种基于请求 (request-based) 的机制把这些功能集中起来,并且可以很好地拓展。DRF[29,35,36,66]最初是为Mesos开发的;Borg则使用了优先级和准入配额来替代。Mesos的开发者宣布了拓展Mesos功能的雄心,使其支持预测性资源分配及回收,并修复[69]中提到的某些问题。
YARN 是一个以Hadoop为中心的集群管理器。每个应用都有一个管理器与中心资源管理器谈判它所需的资源;这和2008年以来Google MapReduce的jobs从Borg获取资源的模式十分相像。 YARN 的资源管理器最近才支持容错。一个相关的开源项目是 Hadoop Capacity Scheduler ,它支持多租户容量保证,多级队列,弹性共享和公平性。 YARN 最近通过拓展支持了多种资源类型,优先级,抢占和高级准入控制。Teris的研究原型支持了完成时间感知的作业装箱机制。
Facebook的 Tupperware 是一个集群中调度cgroup容器的类Borg系统;只有一些细节被透露,不过看起来它可以提供某种程度的资源回收。Twitter开源了名为 Aurora 的调度长时运行于Mesos之上的服务的类Borg调度器,其配置语言和状态机也类似于Borg。
微软的 Autopilot 为微软的集群提供了“自动化软件供应与部署;系统监控;为有故障的软件和硬件执行修复操作”。Borg生态系统提供了类似的特性,不过篇幅有限不再讨论。作者Issard提炼了一些我们也十分赞同的最佳实践。
Quincy 使用了一种网络流模型来提供公平且数据局部性感知的调度,在上百个节点集群中提供DAG (Directed Acyclic Graph) 数据处理。Borg使用配额和优先级机制在用户之间共享资源,规模可扩容至上万台机器。Quincy直接处理执行图,而Borg需要在其上独立创建。
Cosmos 专注于批处理,重点关注它的用户是否能公平地获取到他们捐献给集群的资源。每个作业都有一个管理器来获取资源,关于Cosmos的公开资料还十分有限。
Microsoft的 Apollo 系统为每个短期批处理作业分配一个调度器来获得高吞吐,且集群的规模看起来与Borg cells相当。Apollo适时且随机地执行低优先级的后台任务,以(偶尔)长达多日的队列等待为代价,将利用率提升到另一个高水平。Apollo节点为任务的启动时间提供预测矩阵,作为两个资源维度的大小函数,调度器将此预测矩阵与任务启动开销,远程数据访问开销的测量结果相结合,作出最终的部署决策,并用一个随机的延迟来减少碰撞。Borg使用一个中央调度器作出基于先前资源分配状态的部署决策,这样可以处理更多维度的资源,并且专注于高可用,长时运行的应用的需求。也许Apollo可以处理更高的任务到达速率。
阿里巴巴的 Fuxi 支持数据分析的工作负载,它从2009年起就开始运行了。类似Borg,Fuxi有一个中心FuxiMaster(多副本以容错)从各个节点收集可用资源的信息,接受来自应用的请求,并且将两者匹配。Fuxi的渐进式调度策略与Borg的等价类相反:Fuxi将最新可用的资源与积压的等待任务进行匹配,而不是将task与一群合适机器进行逐个匹配 (Fuxi是资源匹配任务,Borg是任务匹配资源) 。类似Mesos,Fuxi也支持定义“虚拟资源”类型。目前只有合成的工作负载实验结果是公开的。
Omega 支持多并行且十分垂直的调度,粗略等于移除持久化存储与链接分片的Borgmaster。Omega使用乐观并发控制来操作的共享的集群预期与被观察的状态表示,状态保存在中央持久化存储模块中,通过分离的链接组件与Borglet同步。Omega的架构为支持多种不同的工作负载而设计,每个工作负载有自己应用特定的RPC接口,状态机和调度策略(例如,长时运行服务,不同框架的批处理作业,集群存储系统这样的基础设施服务,Google Cloud Platform上的虚拟机)。另一方面,Borg提供了普适的RPC接口,状态机语义和调度策略,出于支持多种工作负载的需求,其规模和复杂度都在随着时间增长,但扩展性目前还不是问题。
Google的开源系统 Kubernetes 将应用部署在主机节点的Docker容器中。它可以运行在物理机上(像Borg那样),也可以运行在不同云主机供应商上,例如Google Compute Engine。Kubernetes正在多个Borg开发者的参与下活跃开发。Google提供了一个被称为Google Container Engine的托管版本。我们将在下一节讨论从Borg到Kubernetes的应用中学到了哪些。 高性能计算社区在这一领域已经开展了长期工作(例如,Maui,Moab,Platform LSF)。但因为规模,工作负载和容错需求的不同,和Google的集群还是有些不同。通常来说,这些系统通过持有大量的积压(等待)作业来达到高利用率。 虚拟化厂商,比如VMware,或数据中心解决方案厂商,比如HP和IBM,都提供了通常能够支持O(1000)复杂度 (机器数量达1000) 的集群管理解决方案。除此之外,几个研究小组完成了能够以多种方式提高调度决策质量的系统原型。[25,40,72,74]
最后,正如我们所说,管理大规模集群的另一重要方面是自动化和“运维人员横向拓展”。[43]描述了如何规划故障处理,多租户,健康检查,准入控制和快速重启等特性,对于单个运维人员管理大量机器是十分重要的。Borg的设计哲学与此相似,允许单个运维人员(SRE)操作数万台机器。
8. Lessons and future work(经验和未来的工作)
本节我们将复盘一些在长达十几年的线上操作Borg的经历中学到的宝贵经验,并说明这些结果是如何被Kubernetes的设计所利用的。
8.1 经验:坏的一面
我们将从Borg的一些特性开始作为警示,并讲述Kubernetes中的一些替代方案。
将job作为task的唯一分组机制有诸多限制。 Borg没有很好的方法将多作业组成的服务当做一个实体来管理,或支持相关的服务实例互相引用(例如,测试通道和生产通道)。用户使用了他们自己的hack手段,将服务拓扑编码入job名,并构建更高级的管理工具来解析这些名字。但另一方面,这没办法引用job的任意子集,导致不能灵活地回滚配置和调整job大小。 为了避免这些困难,Kubernetes弃用了job的概念,取而代之的是利用 标签(labels) 作为组织调度单元 (pods) 的方式——用户可以对系统中的任意对象附加键值对。对于Borg job来说,等效做法是将一个 job:jobname 标签附加到一系列pods上,不过标签能够表示更多有用的分组方式,例如服务、层级、发布类型(如生产、就绪、测试)。Kubernetes中的操作通过查询标签意义的方式来选择操作涉及的目标对象。这种方法比单一固定的job方式灵活的多。
一台机器一个IP地址增加了复杂度。 在Borg中,同一台机器上的所有tasks使用一个主机IP地址,同样也共享了主机的端口空间。这导致了一些困难:Borg必须将端口作为调度的资源;tasks必须预先声明需要的端口数;并且告知它们启动时需要哪些端口;Borglet必须强制进行端口隔离;域名与RPC系统必须将端口与IP地址一同处理。 感谢Linux namespace,虚拟机(VMs),IPv6和软件定义网络(SDN)的诞生,Kubernetes可以利用一种对用户更友好的方法来解决这些复杂的问题:每个pod和服务都有自己的IP地址,开发者可以自行选择端口而不是要求他们的软件被动地适应基础设施服务选择的端口,并且移除了基础设施管理端口的复杂度。
以临时用户为代价,对高级用户优化。 Borg向“高级用户”提供了大量特性,使得他们可以很好地调节程序运行的方式(BCL规范罗列了230个左右的参数):最初的关注点在支持Google的大型资源消费者,效率是它们最在乎的。不幸的是,如此强大的API使得“临时”用户的体验变得糟糕,并限制了API的演进。我们的解决方案是构建运行于Borg之上的自动化工具与服务,并从实验中确定合适的设置。程序容错使得实验可以自由进行;若自动化程序出错了,只会产生干扰但不会致命。
8.2 经验:好的一面
另一方面,Borg的一些设计特性非常有益,并且经受住了时间的考验。
Allocs非常有用 。Borg的alloc抽象催生了广泛使用的日志保存模式及另一在web服务中非常流行的模式:以一个简单的数据加载任务定期更新数据。Allocs和包允许这些辅助服务由独立的团队开发。Kubernetes中与alloc等效的是 pod , pod是由单个或多个容器组成的资源封装,且一定会被调度到同一台机器上并共享其资源。Kubernetes在同一pod中使用辅助容器来替代alloc中的task,但想法是一样的。
集群管理不仅仅是任务管理 。Borg的主要角色是管理tasks与机器的生命周期,但其上的应用也受益于其他集群服务,包括命名服务与负载均衡服务。Kubernetes使用 service 抽象支持了命名和负载均衡:单个service拥有一个名字和一个由标签选择器定义的动态pods集合。集群中的所有容器都可以通过service名与其连接。在这背后,Kubernetes自动将该service的连接负载均衡到与标签匹配的pods之间,并且对它们运行的位置进行跟踪,这样当它们发生故障时就可以被重新调度。
内省至关重要 。尽管Borg总是能正常工作,但当意外发生时,找到根本原因依然是一个挑战。Borg的一个重要设计决定就是将调试信息对所有用户都公开而非隐藏:Borg有数千用户,因此调试的第一步即"自助"。虽然这让我们难以弃用一些特性并改变用户依赖的一些内部策略,这仍然是成功的,我们没有发现更好的选择。为了处理海量卷数据,我们提供了不同级别的UI和调试工具,用户可以快速识别与其job相关的异常事件,然后深入研究来自于应用和基础设施本身的详细事件与错误日志。 Kubernetes致力于引入Borg中已有的很多内省技术。例如,Kubernetes附带了cAdvisor用于资源监控,基于Elasticsearch/Kibana和Fluentd进行日志聚合。master节点可被请求生成其对象状态的一个快照。Kubernetes有统一的机制使得所有组件都可以记录事件(例如一个pod被调度,一个容器故障)并暴露给客户端。 master节点是分布式系统的关键 。Borgmaster最初被设计为一个单片系统,但随着时间推移,它演变成了各个管理用户作业的服务互相协作形成的生态系统的大心脏。举个例子,我们把调度器和主要UI(Sigma)分离为单独的进程,并添加准入控制,垂直和水平自动拓展,任务重新打包,定时任务提交(cron),工作流管理,用于离线查询的系统动作归档等服务。以上种种使得我们可以扩大工作负载和特性集合而不会对性能及可维护性造成影响。 Kubernetes的架构则更进一步:它的核心是一个只负责处理请求或操作状态对象的API Server。整个集群管理逻辑由小粒度且可组合的微服务构成,它们都是API Server的客户端,例如为了应对故障,维护目标pod副本数目的副本控制器(replication controller),管理机器生命周期的节点控制(node controller)。
8.3 结论
实际上,在过去的十几年,Google的所有集群负载都已被迁移至Borg。我们仍在不断迭代,并把学到的经验应用到Kubernetes中。