python函数笔记总结
1.logging模块的使用
from resource.util.get_logger import get_logger
main_logger=get_logger("main","data/log/{}.log".format(TrainOption.task_uuid))
main_logger.info("TASK ID {}".format(TrainOption.task_uuid))
import logging
engine_logger = logging.getLogger("main.engine")
engine.info("")
关于logging模块,现在大概知道是一个关于日志记录打印的模块,getLogger函数传入的参数是所要记录模块的日志名称,通常为模块名。返回的对象,可以接到多个输出,记录日志到文件或工作台;并且可以过滤不同等级的日志信息,方便管理。然后关于多模块使用logging,在同一个python解释器里返回的都是同一个对象实例,但可以输出不同名称的日志记录。
2.python命令行交互 argparse
使用argparse包使得python可以直接从命令行读取参数
import argparse
parser = argparse.ArgumentParser()
parser.add_argument("--m", choices=["1", "2", "3", "4","5"]) # choices设置参数值的范围,如果choices中的类型不是字符串,需要指定type
parser.add_argument("--k", action="store_true", help="with knowledge")# ‘--’表示是可选参数,action="store_true"表示在命令行中无需添加赋值内容,只需要写--k即表示args.k=true
parser.add_argument("--g", type=int, default=0)#default表示如果没有填入的话为默认值
arg=parser.parse_arg()
- choices设置参数值的范围,如果choices中的类型不是字符串,需要指定type
- ‘- -’表示是可选参数,action="store_true"表示在命令行中无需添加赋值内容,只需要写–k即表示args.k=true
- default表示如果没有填入的话为默认值
使用实例:
python 文件名.py --m 1 --k
程序执行时,得到arg.m=1,arg.k=true,arg.g=0
3.python函数中参数的传递
-
function(*arg):
在python函数的定义时,可能会根据情况的不同出现传入参数个数不固定的情况,以∗*∗加上形参名的方式表示函数的参数个数不固定,可以是0个,也可以是多个。传入的参数在函数内部被存放在以形参名为标识符的tuple中。
例子:
def loss(self,*targets):
target,history=targets[0],targets[1]
def function1(*x):
if len(x)==0:
print("None")
else:
print(x)
第二个例子运行结果:
function1()
输出:None
function1(1,2,3)
输出:1,2,3
-
function(**arg):
形参前加两个*,在函数调用时,参数将被存储在字典中,在函数调用时,传参数需要使用arg1=value1,arg2=value2…的形式
例子:
def function1(**x):
if len(x)==0:
print("None")
else:
print(x)
运行结果:
function1()
输出:None
function1(x=1,y=2,z=3)
输出:{‘x’:1,‘y’:2,‘z’:3}
4.pytorch中模型的保存与加载:torch.save(),torch.load()
模型的保存
torch.save(net,PATH)#保存模型的整个网络,包括网络的整个结构和参数
torch.save(net.state_dict,PATH)#只保存网络中的参数
模型的加载
分别对应上边的加载方法。
model_dict=torch.load(PATH)
model_dict=net.load_state_dict(torch.load(PATH))
在自定义的网络中的使用:
import torch
import torch.nn as nn
class neuralModel(nn.Module):
def __init__(self,device):super(neuralModel,self).__init__()
self.device=device#初始化函数
def dump(self,filename):#保存模型参数
torch.save(self.state_dict(),filename)
def load(self,filename):
state_dict=torch.load(open(filename,"rb"),map_location=self.device)
self.load_state_dict(state_dict,strict=True)
其中map_location为改变设备(gpu0,gpu1,cpu…)
5.torch.nn.Module中的training属性详情,与Module.train()和Module.eval()的关系
Module类的构造函数:
def __init__(self):
"""
Initializes internal Module state, shared by both nn.Module and ScriptModule.
"""
torch._C._log_api_usage_once("python.nn_module")
self.training = True
self._parameters = OrderedDict()
self._buffers = OrderedDict()
self._backward_hooks = OrderedDict()
self._forward_hooks = OrderedDict()
self._forward_pre_hooks = OrderedDict()
self._state_dict_hooks = OrderedDict()
self._load_state_dict_pre_hooks = OrderedDict()
self._modules = OrderedDict()
其中training属性表示BatchNorm与Dropout层在训练阶段和测试阶段中采取的策略不同,通过判断training值来决定前向传播策略。
对于一些含有BatchNorm,Dropout等层的模型,在训练和验证时使用的forward在计算上不太一样。在前向训练的过程中指定当前模型是在训练还是在验证。使用module.train()和module.eval()进行使用,其中这两个方法的实现均有training属性实现。
关于这两个方法的定义源码如下:
train():
def train(self, mode=True):
r"""Sets the module in training mode.
This has any effect only on certain modules. See documentations of
particular modules for details of their behaviors in training/evaluation
mode, if they are affected, e.g. :class:`Dropout`, :class:`BatchNorm`,
etc.
Args:
mode (bool): whether to set training mode (``True``) or evaluation
mode (``False``). Default: ``True``.
Returns:
Module: self
"""
self.training = mode
for module in self.children():
module.train(mode)
return self
eval():
def eval(self):
r"""Sets the module in evaluation mode.
This has any effect only on certain modules. See documentations of
particular modules for details of their behaviors in training/evaluation
mode, if they are affected, e.g. :class:`Dropout`, :class:`BatchNorm`,
etc.
This is equivalent with :meth:`self.train(False) `.
Returns:
Module: self
"""
return self.train(False)
从源码中可以看出,train和eval方法将本层及子层的training属性同时设为true或false。
具体如下:
net.train() # 将本层及子层的training设定为True
net.eval() # 将本层及子层的training设定为False
net.training = True # 注意,对module的设置仅仅影响本层,子module不受影响
net.training, net.submodel1.training
6.pytorch .to(device)
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model.to(device)
mytensor = my_tensor.to(device)
这行代码的意思是将所有最开始读取数据时的tensor变量copy一份到device所指定的GPU上去,之后的运算都在GPU上进行。
这句话需要写的次数等于需要保存GPU上的tensor变量的个数;一般情况下这些tensor变量都是最开始读数据时的tensor变量,后面衍生的变量自然也都在GPU上
Tensor总结
(1)Tensor 和 Numpy都是矩阵,区别是前者可以在GPU上运行,后者只能在CPU上;
(2)Tensor和Numpy互相转化很方便,类型也比较兼容
(3)Tensor可以直接通过print显示数据类型,而Numpy不可以
7.torch.nn.CrossEntropyLoss(),torch.nn.NLLLoss()函数
torch.nn.NLLLoss()
NLLLoss() ,即负对数似然损失函数(Negative Log Likelihood)。nn.NLLLoss输入是一个对数概率向量和一个目标标签。
NLLLoss() 损失函数公式:
N L L L o s s = − 1 N ∑ k = 1 N y k ( l o g _ s o f t m a x ) NLLLoss=-\frac{1}{N}\sum_{k=1}^{N}y_k(log\_softmax) NLLLoss=−N1k=1∑Nyk(log_softmax)
y k y_k yk表示one_hot 编码之后的数据标签
损失函数运行的结果为 y k y_k yk与经过log_softmax运行的数据相乘,求平均值,再取反。
实际使用NLLLoss()损失函数时,传入的标签,无需进行 one_hot 编码(这个具体是个啥不太清楚???)
这块对于数据相乘还不太清楚,因为下边代码验证的例子,是说输入的target相当于在input中进行选择,选择标签对应的元素
torch.nn.CrossEntropyLoss()
对数据进行softmax,再log,再进行NLLLoss。其与nn.NLLLoss的关系可以描述为:
softmax(x)+log(x)+nn.NLLLoss====>nn.CrossEntropyLoss
相关的代码实现验证:
import torch
input=torch.randn(3,3)
print(input)
soft_input=torch.nn.Softmax(dim=1)
a=soft_input(input)#对数据在1维上进行softmax计算
print(a)
b=torch.log(soft_input(input))#计算log
print(b)
loss=torch.nn.NLLLoss()
target=torch.tensor([0,1,2])
print('NLLLoss:')
print(loss(b,target))#选取第一行取第0个元素,第二行取第1个,
#---------------------第三行取第2个,去掉负号,求平均,得到损失值。
loss=torch.nn.CrossEntropyLoss()
print('CrossEntropyLoss:')
print(loss(input,target))
运行结果:
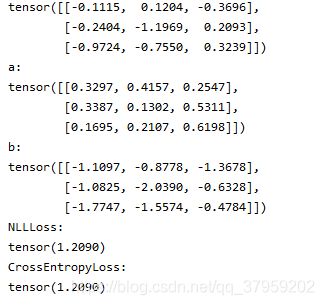
可以看到当softmax函数在1维上进行计算时,两种方法得到的值相同。
相关源码:
这一点关于torch.nn.CrossEntropyLoss()的源码中可以看到:
![]()
进入对应函数:
CrossEntropyLoss()的定义
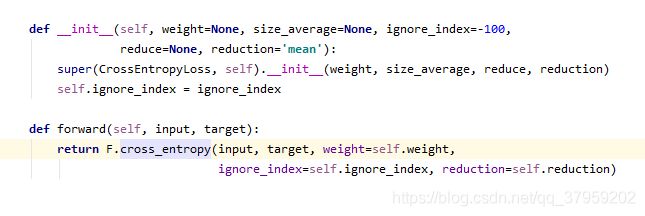
进入其返回的cross_entropy():

可以看到其是在1维上进行softmax的求解。
8.pytorch nn.GRU(),RNN,LSTM
GRU,LSTM,RNN等模型网络在pytorch中的定义均在torch/nn/modules/rnn,py中
其中GRU,RNN,LSTM均是继承的父类RNNBase
其中关于RNNBase类的定义:
def __init__(self, mode, input_size, hidden_size,
num_layers=1, bias=True, batch_first=False,
dropout=0., bidirectional=False):
super(RNNBase, self).__init__()
self.mode = mode
self.input_size = input_size
self.hidden_size = hidden_size
self.num_layers = num_layers
self.bias = bias
self.batch_first = batch_first
self.dropout = float(dropout)
self.bidirectional = bidirectional
num_directions = 2 if bidirectional else 1
if not isinstance(dropout, numbers.Number) or not 0 <= dropout <= 1 or \
isinstance(dropout, bool):
raise ValueError("dropout should be a number in range [0, 1] "
"representing the probability of an element being "
"zeroed")
if dropout > 0 and num_layers == 1:
warnings.warn("dropout option adds dropout after all but last "
"recurrent layer, so non-zero dropout expects "
"num_layers greater than 1, but got dropout={} and "
"num_layers={}".format(dropout, num_layers))
if mode == 'LSTM':
gate_size = 4 * hidden_size
elif mode == 'GRU':
gate_size = 3 * hidden_size
elif mode == 'RNN_TANH':
gate_size = hidden_size
elif mode == 'RNN_RELU':
gate_size = hidden_size
else:
raise ValueError("Unrecognized RNN mode: " + mode)
self._all_weights = []
for layer in range(num_layers):
for direction in range(num_directions):
layer_input_size = input_size if layer == 0 else hidden_size * num_directions
w_ih = Parameter(torch.Tensor(gate_size, layer_input_size))
w_hh = Parameter(torch.Tensor(gate_size, hidden_size))
b_ih = Parameter(torch.Tensor(gate_size))
# Second bias vector included for CuDNN compatibility. Only one
# bias vector is needed in standard definition.
b_hh = Parameter(torch.Tensor(gate_size))
layer_params = (w_ih, w_hh, b_ih, b_hh)
suffix = '_reverse' if direction == 1 else ''
param_names = ['weight_ih_l{}{}', 'weight_hh_l{}{}']
if bias:
param_names += ['bias_ih_l{}{}', 'bias_hh_l{}{}']
param_names = [x.format(layer, suffix) for x in param_names]
for name, param in zip(param_names, layer_params):
setattr(self, name, param)
self._all_weights.append(param_names)
self.flatten_parameters()
self.reset_parameters()
其中关于mode定义了模型是GRU,LSTM…
- input_size:输入数据X的特征值的数目。
- hidden_size:隐藏层的神经元数量,也就是隐藏层的特征数量。
- num_layers:循环神经网络的层数,默认值是 1。
- bias:默认为 True,如果为 false 则表示神经元不使用 bias 偏移参数。
- batch_first:如果设置为 True,则输入数据的维度中第一个维度就 是 batch 值,默认为 False。默认情况下第一个维度是序列的长度, 第二个维度才是 - - batch,第三个维度是特征数目。
- dropout:如果不为空,则表示最后跟一个 dropout 层抛弃部分数据,抛弃数据的比例由该参数指定。默认为0。
- bidirectional : 如果为True, 则是双向的网络,分为前向和后向。默认为false
关于GRU的输入输出,具体形式和介绍如下:
INPUTS:
- input:(seq_len,batch,input_size)
- h_0:(num_layers*num_directions,batch,hidden_size)
OUTPUTS:
- output:(seq_len,batch,num_directions*hidden_size)
- h_n:(num_layers*num_directions,batch,hidden_size)
Inputs: input, h_0
- input of shape(seq_len, batch, input_size): tensor containing the features
of the input sequence. The input can also be a packed variable length
sequence. See :func:torch.nn.utils.rnn.pack_padded_sequence
or :func:torch.nn.utils.rnn.pack_sequence
for details.
- h_0 of shape(num_layers * num_directions, batch, hidden_size): tensor
containing the initial hidden state for each element in the batch.
Defaults to zero if not provided. If the RNN is bidirectional,
num_directions should be 2, else it should be 1.Outputs: output, h_n
- output of shape(seq_len, batch, num_directions * hidden_size): tensor
containing the output features (h_t) from the last layer of the RNN,
for eacht. If a :class:torch.nn.utils.rnn.PackedSequencehas
been given as the input, the output will also be a packed sequence.
For the unpacked case, the directions can be separated
usingoutput.view(seq_len, batch, num_directions, hidden_size),
with forward and backward being direction0and1respectively.
Similarly, the directions can be separated in the packed case.
- h_n of shape(num_layers * num_directions, batch, hidden_size): tensor
containing the hidden state fort = seq_len.
Like output, the layers can be separated using
h_n.view(num_layers, num_directions, batch, hidden_size).
RNN,LSTM输入输出的形式同上。其中如果网络为双向的,则num_directions=2;否则为1。
代码参考:
>>> import torch.nn as nn
>>> gru = nn.GRU(input_size=50, hidden_size=50, batch_first=True)
>>> embed = nn.Embedding(3, 50)
>>> x = torch.LongTensor([[0, 1, 2]])
>>> x_embed = embed(x)
>>> x.size()
torch.Size([1, 3])
>>> x_embed.size()
torch.Size([1, 3, 50])
>>> out, hidden = gru(x_embed)
>>> out.size()
torch.Size([1, 3, 50])
>>> hidden.size()
torch.Size([1, 1, 50])