强化学习进阶——DQN
目录
预备知识
基本概念
目标和约束条件
MDP马尔可夫决策过程
假设
基本概念
计算价值函数
Action-Value Function动作价值函数
Optimal value function最优价值函数
策略迭代和值迭代
Q-Learning
Q-Learning算法
EE问题
DQN
Q-Learning神经网络化
DQN算法及其改进
NIPS DQN
Natural DQN
Double DQN
Prioritised replay
Dueling Network
在强化学习基础——bandit中,我们已经登堂入室,初窥强化学习的门径。不断探索的我们,怎么可能停滞不前呢?所以接下来,我会我们将重点介绍强化学习进阶——DQN。
预备知识
基本概念
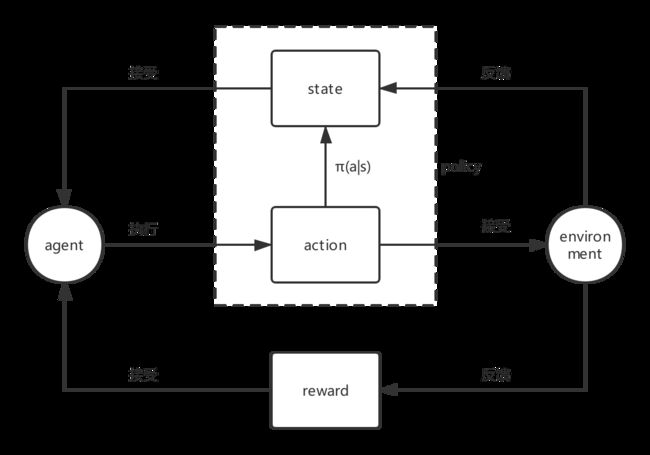
在人工智能领域,一般用智能体Agent来表示一个具备行为能力的物体,比如机器人,无人车,人等等。那么增强学习考虑的问题就是智能体Agent和环境Environment之间交互的任务。
不管是什么样的任务,都包含了一系列的动作Action,观察Observation还有反馈值Reward。所谓的Reward就是Agent执行了动作与环境进行交互后,环境会发生变化,变化的好与坏就用Reward来表示。
agent、environment、state、action、reward共同构建了强化学习,如下图:
目标和约束条件
强化学习目标是获取尽可能多的reward,如何量化reward?
Agent都是根据当前的观察来确定下一步的动作。观察Observation的集合就作为Agent的所处的状态state。状态state和动作action之间存在映射关系,即一个状态对应不同的动作的概率。
状态state到动作action过程,称为策略policy,表示为![]() 。
。
因此,增强学习的任务就是找到一个最优的策略Policy从而使Reward最多。
一开始并不知道最优的策略是什么,因此往往从随机的策略开始,使用随机的策略进行试验,就可以得到一系列的状态,动作和反馈:
![]()
这就是一系列的样本sample,增强学习需要这些样本改进policy。
MDP马尔可夫决策过程
假设
马尔可夫决策过程(MDP,Markov Decision Process)基本假设如下:
- 未来只取决于当前,即下一步的状态只取决于当前的状态,与过去的状态没有关系;
- 上帝不摘骰子,如果输入是确定的,那么输出也一定是确定的;
基本概念
一个基本MDP可以用(S,A,P)表示,S表示状态,A表示动作,P表示状态转移概率。状态对应动作的概率,有了动作,下一个状态也是确定的。
那么怎么描述状态的好坏?引入回报Return来表示某个时刻t的状态将具备的回报:
![]()
上面R是Reward反馈,λ是discount factor折扣因子,一般小于1,就是说一般当下的反馈是比较重要的,时间越久,影响越小。
实际上除非整个过程结束,否则显然我们无法获取所有的reward来计算出每个状态的Return,因此引入价值函数(Value Function)来表示未来潜在的价值:
![]()
计算价值函数
基于反复试验value Function评估,数学公式如下:
![]()
Bellman公式表明,value function是可以通过迭代计算出来的。
Action-Value Function动作价值函数
考虑到每个状态之后都有多种动作可以选择,每个动作之下的状态又多不一样,我们更关心在某个状态下的不同动作的价值。显然。如果知道了每个动作的价值,那么就可以选择价值最大的一个动作去执行了。动作价值函数表示为:
![]()
Optimal value function最优价值函数
计算动作价值函数是不够的,需要的是最有策略,求解最有策略方法有value-based,policy-based和model-based方法。
最优价值策略函数和一般动作价值函数关系:
![]()
最优价值策略函数是所有策略的价值函数的最大值。
策略迭代和值迭代
策略迭代
Policy Iteration是直接使用Bellman方程,其目的是通过迭代计算value function 价值函数的方式来使policy收敛到最优。其基本步骤如下:
- Policy Evaluation 策略评估。目的是 更新Value Function,或者说更好的估计基于当前策略的价值;
- Policy Improvement 策略改进。 使用 greedy policy 产生新的样本用于第一步的策略评估;
本质上就是使用当前策略产生新的样本,然后使用新的样本更好的估计策略的价值,然后利用策略的价值更新策略,然后不断反复。理论可以证明最终策略将收敛到最优。
值迭代
Value Iteration是使用Bellman 最优方程得到,和Policy Iteration有什么区别:
policy iteration使用bellman方程来更新value,最后收敛的value 即![]() 是当前policy下的value值(所以叫做对policy进行评估),目的是为了后面的policy improvement得到新的policy。
是当前policy下的value值(所以叫做对policy进行评估),目的是为了后面的policy improvement得到新的policy。
而value iteration是使用bellman 最优方程来更新value,最后收敛得到的value即![]() 就是当前state状态下的最优的value值。因此,只要最后收敛,那么最优的policy也就得到的。因此这个方法是基于更新value的,所以叫value iteration。
就是当前state状态下的最优的value值。因此,只要最后收敛,那么最优的policy也就得到的。因此这个方法是基于更新value的,所以叫value iteration。
value iteration比policy iteration更直接,不过理想条件下需要遍历所有的状态,这在复杂一些的问题上就基本不可能了。
Q-Learning
介绍以上强化学习储备知识后,下面开始进入正题了。首先从Q-Learning开始。
Q-Learning算法
Q Learning是基于value iteration得到。但value iteration每次都对所有的Q值更新一遍,也就是所有的状态S和动作A。一个s一个a对应一个Q值,需要维护一张S*A的Q值表,如下:
| ... | ||||
| Q(1,1) | Q(1,2) | Q(1,m) | ||
| Q(2,1) | Q(2,2) | Q(2,m) | ||
| ... | ||||
| Q(n,1) | Q(n,2) | Q(n,m) |
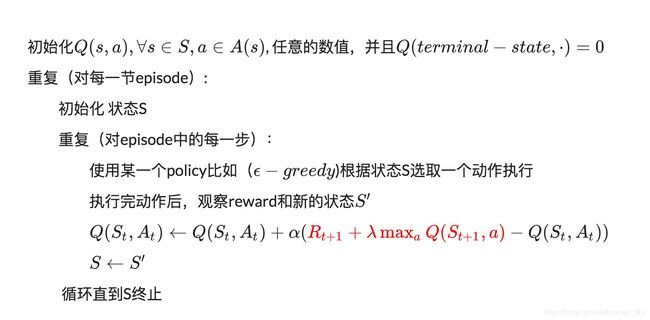
因此只能使用有限的样本进行操作。为此Q Learning提出了一种更新Q值的办法:
这里并没有直接将这个Q值(是估计值)直接赋予新的Q,而是采用渐进的方式类似梯度下降,朝target迈近一小步,取决于α,这就能够减少估计误差造成的影响。类似随机梯度下降,最后可以收敛到最优的Q值。其算法流程如下:
EE问题
Q-Learning完全不考虑model模型也就是环境的具体情况,只考虑看到的环境及reward,因此是model-free的方法。那么怎样选择policy来生成action呢?有两种做法:
- 探索阶段:随机生成动作;
- 利用阶段:根据当前的Q值计算出一个最优的动作,这个policy π称之为greedy policy贪婪策略
 ;
;
使用随机的动作就是exploration,有利于更新Q值,获得更好的policy。而使用greedy policy则是exploitation,利用policy,可以得到更好的测试效果用于判断算法是否有效。
将两者结合起来就是所谓的![]() 策略,一般
策略,一般![]() 是一个很小的值,决定exploration和exploitation的比例。
是一个很小的值,决定exploration和exploitation的比例。
DQN
Q-Learning神经网络化
当状态和动作空间是高维连续时,使用Q-Table不现实。如何解决维度灾难问题呢?答案是价值函数近似(Value Function Approximation)。其本质就是用一个函数近似Q值的分布,即:
![]()
DQN不用Q表记录Q值,而是用神经网络来预测Q值,并通过不断更新神经网络从而学习到最优的行动路径。
而Q值神经网络化要有海量带有标签的样本,如何实现呢?
利用Q-Learning中Reward和Q计算出来的目标Q值:
![]()
把目标Q值作为标签,让Q值趋近于目标Q值。
因此,Q网络训练的损失函数就是:
![\small L\left ( w \right )=E\left [( \underbrace{r+ \lambda \underset{a^{'}}{max}Q\left ( s^{'},a^{'},w \right )}-Q(s,a,w))^2 \right ]](http://img.e-com-net.com/image/info8/a01c066c5df54629901e1baf79704bcb.gif)
DQN算法及其改进
NIPS DQN
第一个版本的DQN(NIPS 2013提出的),在基本的Deep Q-Learning算法的基础上使用了Experience Replay经验池,算法流程如下:

主要涉及存储样本和采样问题,考虑到样本之间具有连续性,如果每次得到样本就更新Q值,受样本分布影响,效果会不好。因此,把样本先存起来,然后随机采样,降低数据相关性,这就是Experience Replay的意思。按照脑科学的观点,人的大脑也具有这样的机制,就是在回忆中学习。
Natural DQN
Nature DQN是在NPIS DQN上增加Target Q网络。也就是我们在计算目标Q值时使用专门的一个目标Q网络来计算,而不是直接使用预更新的Q网络。这样做的目的是为了减少目标计算与当前值的相关性。
![\small L\left ( w \right )=E\left [( \underbrace{r+ \lambda \underset{a^{'}}{max}Q\left ( s^{'},a^{'},w^{-} \right )}-Q(s,a,w))^2 \right ]](http://img.e-com-net.com/image/info8/fb79b5de0ddd415e88d2b6725fe942dc.gif)
如上公式,计算目标Q值的网络使用的参数是w-,而不是w。Target Q仍从Q网络中来,只不过是延迟更新。也就是每次等训练了一段时间再将当前Q网络的参数值复制给目标Q网络。
Double DQN
目的是减少max Q值计算带来的计算偏差,或者称为过度估计(over estimation)问题,用当前的Q网络w来选择动作,用目标Q网络![]() 来计算目标Q。其改进公式如下:
来计算目标Q。其改进公式如下:
![\small L\left ( w \right )=E\left [( \underbrace{r+ \lambda Q\left ( s^{'},\underset{a^{'}}{argmax}\, Q\left ( s^{'},a^{'},w \right ),w^{-} \right )}-Q(s,a,w))^2 \right ]](http://img.e-com-net.com/image/info8/961e3936bc494d26943d3c7d82dcb420.gif)
部分伪代码如下:
# 定义双网络结构
def build_layers(s,c_name,n_l1,w_initializer,b_initializer):
with tf.variable_scope('l1'):
w1 = tf.get_variable(name='w1',shape=[self.n_features,n_l1],initializer=w_initializer,collections=c_name)
b1 = tf.get_variable(name='b1',shape=[1,n_l1],initializer=b_initializer,collections=c_name)
l1 = tf.nn.relu(tf.matmul(s,w1)+b1)
with tf.variable_scope('l2'):
w2 = tf.get_variable(name='w2',shape=[n_l1,self.n_actions],initializer=w_initializer,collections=c_name)
b2 = tf.get_variable(name='b2',shape=[1,self.n_actions],initializer=b_initializer,collections=c_name)
out = tf.matmul(l1,w2) + b2
return out
# ------------------ build evaluate_net ------------------
with tf.variable_scope('eval_net'):
c_names = ['eval_net_params',tf.GraphKeys.GLOBAL_VARIABLES]
n_l1 = 20
w_initializer = tf.random_normal_initializer(0,0.3)
b_initializer =tf.constant_initializer(0.1)
self.q_eval = build_layers(self.s,c_names,n_l1,w_initializer,b_initializer)
# ------------------ build target_net ------------------
with tf.variable_scope('target_net'):
c_names = ['target_net_params', tf.GraphKeys.GLOBAL_VARIABLES]
self.q_next = build_layers(self.s_, c_names, n_l1, w_initializer, b_initializer)Prioritised replay
不同样本的重要性是不一样的,优化记忆库抽取。其改进数学公式如下:
![\small L\left ( w \right )=E\left [ \left | \underbrace{r+ \lambda \underset{a^{'}}{max}Q\left ( s^{'},a^{'},w^{-} \right )}-Q(s,a,w) \right | \right ]](http://img.e-com-net.com/image/info8/459a7acc33b44b6fba4f052be52f423e.gif)
按误差的大小进行重要程度排序,误差越大说明越需要被学习。但是为了效率,不能每次都排一遍太麻烦,所以使用sumtree(线段树)排序相对来说就简单了。
SumTree 是一种树形结构, 每片树叶存储每个样本的优先级 p, 每个树枝节点只有两个分叉, 节点的值是两个分叉的合, 所以 SumTree 的顶端就是所有p的和,如下:

抽样时, 我们会将 p 的总合 除以 batch size, 分成 batch size 那么多区间, (n=sum(p)/batch_size). 如果将所有 node 的 priority 加起来是42的话, 我们如果抽6个样本, 这时的区间拥有的 priority 可能是这样:
[0-7], [7-14], [14-21], [21-28], [28-35], [35-42]
部分伪代码如下:
# ISWeight计算
def sample(self, n):
b_idx, b_memory, ISWeights = np.empty((n,), dtype=np.int32), np.empty((n, self.tree.data[0].size)), np.empty((n, 1))
pri_seg = self.tree.total_p / n # priority segment
self.beta = np.min([1., self.beta + self.beta_increment_per_sampling]) # max = 1
min_prob = np.min(self.tree.tree[-self.tree.capacity:]) / self.tree.total_p # for later calculate ISweight
if min_prob == 0:
min_prob = 0.00001
for i in range(n):
a, b = pri_seg * i, pri_seg * (i + 1)
v = np.random.uniform(a, b)
idx, p, data = self.tree.get_leaf(v)
prob = p / self.tree.total_p
ISWeights[i, 0] = np.power(prob/min_prob, -self.beta)
b_idx[i], b_memory[i, :] = idx, data
return b_idx, b_memory, ISWeights
# 采样节点
def get_leaf(self, v):
"""
Tree structure and array storage:
Tree index:
0 -> storing priority sum
/ \
1 2
/ \ / \
3 4 5 6 -> storing priority for transitions
Array type for storing:
[0,1,2,3,4,5,6]
"""
parent_idx = 0
while True: # the while loop is faster than the method in the reference code
cl_idx = 2 * parent_idx + 1 # this leaf's left and right kids
cr_idx = cl_idx + 1
if cl_idx >= len(self.tree): # reach bottom, end search
leaf_idx = parent_idx
break
else: # downward search, always search for a higher priority node
if v <= self.tree[cl_idx]:
parent_idx = cl_idx
else:
v -= self.tree[cl_idx]
parent_idx = cr_idx
data_idx = leaf_idx - self.capacity + 1
return leaf_idx, self.tree[leaf_idx], self.data[data_idx]
# 更新sumTree权重
def batch_update(self, tree_idx, abs_errors):
abs_errors += self.epsilon # convert to abs and avoid 0
clipped_errors = np.minimum(abs_errors, self.abs_err_upper)
ps = np.power(clipped_errors, self.alpha)
for ti, p in zip(tree_idx, ps):
self.tree.update(ti, p)
def update(self, tree_idx, p):
change = p - self.tree[tree_idx]
self.tree[tree_idx] = p
# then propagate the change through tree
while tree_idx != 0: # this method is faster than the recursive loop in the reference code
tree_idx = (tree_idx - 1) // 2
self.tree[tree_idx] += changeDueling Network
考虑到有些state可能无论做什么动作,对下一个state都没有多大的影响。
Dueling DQN考虑将Q网络分成两部分,第一部分是仅仅与状态S有关,与具体要采用的动作A无关,这部分我们叫做价值函数部分,记做V(S,w,α),第二部分同时与状态状态S和动作A有关,这部分叫做优势函数(Advantage Function)部分,记为A(S,A,w,β),那么最终我们的价值函数可以重新表示为:
Q(S,A,w,α,β)=V(S,w,α)+A(S,A,w,β)
其中,w是公共部分的网络参数,而α是价值函数独有部分的网络参数,而β是优势函数独有部分的网络参数。
其部分伪代码如下:
def create_Q_network(self):
# input layer
self.state_input = tf.placeholder("float", [None, self.state_dim])
# network weights
with tf.variable_scope('current_net'):
W1 = self.weight_variable([self.state_dim,20])
b1 = self.bias_variable([20])
# hidden layer 1
h_layer_1 = tf.nn.relu(tf.matmul(self.state_input,W1) + b1)
# hidden layer for state value
with tf.variable_scope('Value'):
W21= self.weight_variable([20,1])
b21 = self.bias_variable([1])
self.V = tf.matmul(h_layer_1, W21) + b21
# hidden layer for action value
with tf.variable_scope('Advantage'):
W22 = self.weight_variable([20,self.action_dim])
b22 = self.bias_variable([self.action_dim])
self.A = tf.matmul(h_layer_1, W22) + b22
# Q Value layer
self.Q_value = self.V + (self.A - tf.reduce_mean(self.A, axis=1, keep_dims=True))
with tf.variable_scope('target_net'):
W1t = self.weight_variable([self.state_dim,20])
b1t = self.bias_variable([20])
# hidden layer 1
h_layer_1t = tf.nn.relu(tf.matmul(self.state_input,W1t) + b1t)
# hidden layer for state value
with tf.variable_scope('Value'):
W2v = self.weight_variable([20,1])
b2v = self.bias_variable([1])
self.VT = tf.matmul(h_layer_1t, W2v) + b2v
# hidden layer for action value
with tf.variable_scope('Advantage'):
W2a = self.weight_variable([20,self.action_dim])
b2a = self.bias_variable([self.action_dim])
self.AT = tf.matmul(h_layer_1t, W2a) + b2a
# Q Value layer
self.target_Q_value = self.VT + (self.AT - tf.reduce_mean(self.AT, axis=1, keep_dims=True))