opencv学习笔记之图像透视变换与极坐标变换
文章目录
- 前言
- 一、图像透视变换
-
-
-
- getPerspectiveTransform()函数原型(用于求取变化矩阵)
- warpPerspective()函数原型
-
-
- 二、极坐标变换
-
-
-
- warpPolar()函数原型
-
-
前言
本次介绍图像的透视变换和极坐标变换
一、图像透视变换
图像的透视变换主要指的是按照物体成像投影规律进行变换,即将物体重新投影到新的成像平面,常用于机器人视觉导航中,透视前与透视后的图像之间的变换可以用3*3的变换矩阵表示,而该矩阵可以通过4个对应点的坐标获取,因此透视变换又称作“四点变换”。
getPerspectiveTransform()函数原型(用于求取变化矩阵)
Mat getPerspectiveTransform(const Point2f src[], const Point2f dst[], int solveMethod = DECOMP_LU)
src[]:原图像中的4个像素坐标
dst[]:目标图像中的4个像素坐标
solveMethod:选择计算透视变换矩阵方法的标志,一般情况下选用最佳主轴元素的高斯消元法DECOMP_LU
warpPerspective()函数原型
void warpPerspective(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags = INTER_LINEAR, int borderMode = BORDER_CONSTANT, const Scarlar & borderValue = Scalar())
src:输入图像
dst:透视变换后输出图像,与src数据类型相同,但是尺寸与dsize相同
M:3*3的变换矩阵
dsize:输出图像的尺寸
flags:插值方法标志
borderMode:像素边界外推方法的标志
borderValue:填充边界使用的数值,默认情况下为0
示例程序:
#include运行结果:
noobcvqr.png:
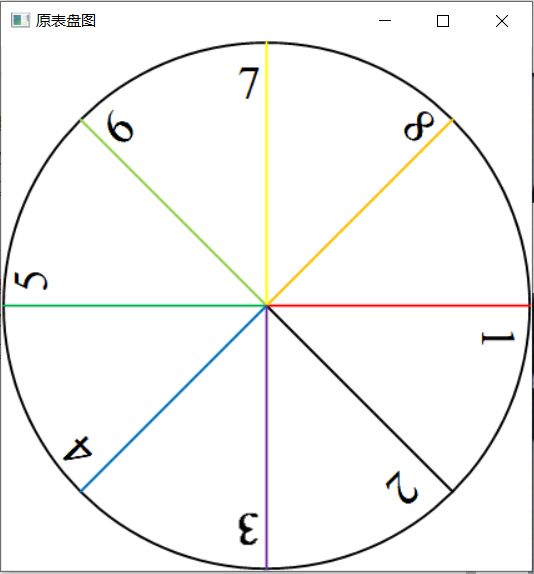
二、极坐标变换
通过将图像在直角坐标系与极坐标系中相互变换,可以使一个图形以不同的方式呈现。比如圆形的图像上的文字,经过极坐标变换后可以垂直地排列在新图像的边缘,便于对文字进行识别和检测。
warpPolar()函数原型
void warpPloar(InputArray src, OutputArray dst, Size dsize, Point2f center, double maxRadius, int flags)
src:源图像,可以是灰度图像或者彩色图像
dst:极坐标变换后输出图像,与源图像具有相同的数据类型和通道数
dsize:目标图像大小
center:极坐标变换时极坐标的原点坐标
maxRadius:变换时边界圆的半径,它也决定了逆变换时的比例参数
flags:插值方法与极坐标映射方法标志,两个方法之间通过“+”或者“|”号连接
极坐标映射方法标志:
| 标志参数 | 作用 |
|---|---|
| WARP_POLAR_LINEAR | 极坐标变换 |
| WARP_POLAR_LOG | 半对数极坐标变换 |
| WARP_INVERSE_MAP | 逆变换 |
示例程序:
#includeimg:
img1:

img2:

感谢阅读!
也欢迎大家关注小白博主,多多鼓励一下!