概述
上个版本简单的连线在一些复杂场景,尤其层级比较多,连线跨层级比较多的情况下,会出现线条会穿过矩形的情况,这一讲就是在这个基础上,去优化这个连线。
场景分析
在下面几种情况下,简单版本的画法已经没法办规避障碍节点了。

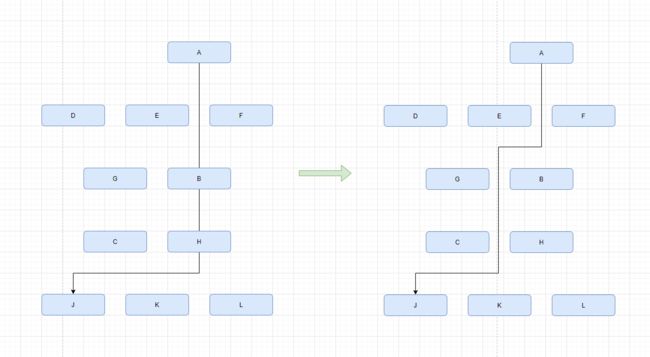
这种情况,由于简单版本,我们只在整条路径上添加了2个拐点,这种画法,当出现上述情况,线条就会被B挡住,实际的需求,我们要规避这种节点,绕开。
应该是下面这种情况:

再复杂一点的场景如下
这时候有2个节点挡住了。我们要做的就是按照图示,绕开节点。
思路分析

观察分析,我们要想绕开,一些障碍节点,我们先要知道哪些节点会挡住,才可以绕开。有两个已经明确数据是,每一层的节点的坐标我们是知道,起点p1, 终点是p6。 我们可以模拟这个过程:
- 如果p1 所在直线没有被最近的下一层挡住,也就是图中D,E,F节点挡住的话,那就说明,起点可以先画到p2
- 画到p2 之后,继续判断第三层节点,由于B节点会挡住从p2 往下画的竖线,所以绕开B节点,由于P6终点再p2 左侧,所以,在B的左侧找一个空白的地方,即p3
- 现在画到p3了,这时候起点编程p3了, 问题转换成画p1的场景了
- 一直循环,直到到终点这一层,把这个路径上的所有的折点记录下来,就是我们的路径
具体实现
function drawLine(startX, startY, endX, endY, color, sourceNodeName, targetNodeName, endLayer, startLayer, lineNodes) {
var points = []; // 保存路径上的折点
var sx = startX;
var ex = endX;
for (var layer = startLayer + 1; layer < endLayer; layer++) {
// 判断当前这一层有没有节点挡住
var coverRectIndex = -1;
for(var i = 0; i < lineNodes[layer].length; i++){
if(lineNodes[layer][i].x < sx && (sx - lineNodes[layer][i].x) < config.rect.width){
coverRectIndex = i;
break;
}
}
if(coverRectIndex === -1){
// 如果没有挡住,检查下一层
continue;
}else{
// 如果有挡住,则需要根据起点和目标节点相对位置,决定往左边绕还是后边绕
var midY = lineNodes[layer][coverRectIndex].y - 40;
// 计算是左边的空隙还是右边的空隙
var midX = lineNodes[layer][coverRectIndex].x;
midX += sx > ex? -(config.rect.space / 2 + config.rect.width) : (config.rect.space / 2 + config.rect.width);
while (true) {
var flag = false;
if (nodeLines[layer]) {
for (var i = 0; i < nodeLines[layer].length; i++) {
var line = nodeLines[layer][i];
if (line.startY === midY) {
if (checkCross(sx, midX, line.startX, line.endX)) {
flag = true;
}
}
if (flag) break;
}
} else {
nodeLines[layer] = [];
}
if (!flag) break;
midY -= lineDis;
}
if (sx !== midX) {
nodeLines[layer].push({
startX: sx,
startY: midY,
endX: midX,
endY: midY
})
}
// 存储路径上点
points.push({ x: sx, y: midY });
points.push({ x: midX, y: midY });
sx = midX;
}
}
// 单独处理最后一层的场景
var midY = lineNodes[endLayer][0].y - 40;
while (true) {
var flag = false;
if (nodeLines[endLayer]) {
for (var i = 0; i < nodeLines[endLayer].length; i++) {
var line = nodeLines[endLayer][i];
if (line.startY === midY) {
if (checkCross(sx, ex, line.startX, line.endX)) {
flag = true;
}
}
if (flag) break;
}
} else {
nodeLines[endLayer] = [];
}
if (!flag) break;
midY -= lineDis;
}
if (sx !== ex) {
nodeLines[layer].push({
startX: sx,
startY: midY,
endX: ex,
endY: midY
})
}
points.push({ x: sx, y: midY });
points.push({ x: ex, y: midY });
return points;
}
总结
这里是在原来的基础上进行优化的,实现了规避障碍节点的功能。一开始,我想到是 A*算法去搜索,但是像素点太多,算法复杂度Hold不住,后面卡在缩点的环节上,经过同事的指点,才实现了当前的这种优化,还是要多学习,多总结!
本文由华为云发布。