opencv-python:11_几何变换(平移、缩放、旋转、仿射变换、透视变换、cv2.warpAffine 、cv2.warpPerspective、cv2.getPerspectiveTran)
几何变换
- 学习对图像进行各种几个变换,例如移动,旋转,仿射变换等。
- 函数:cv2.getPerspectiveTransform。
变换函数
OpenCV 提供了两个变换函数,cv2.warpAffine 和 cv2.warpPerspective,使用这两个函数你可以实现所有类型的变换。cv2.warpAffine 接收的参数是2 × 3 的变换矩阵,而 cv2.warpPerspective 接收的参数是 3 × 3 的变换矩阵。
一、扩展缩放
扩展缩放只是改变图像的尺寸大小。OpenCV 提供的函数 cv2.resize() 可以实现这个功能。
cv2.resize(src, dsize, dst, fx, fy, interpolation)
- 图像的尺寸可以自己手动设置
- 也可以指定缩放因子。
我们可以选择使用不同的插值方法。
- 在缩放时,推荐使用 cv2.INTER_AREA,
- 在扩展时,推荐使用 v2.INTER_CUBIC(慢) 和 v2.INTER_LINEAR。
默认情况下所有改变图像尺寸大小的操作使用的插值方法都是 cv2.INTER_LINEAR。你可以使用下面任意一种方法改变图像的尺寸:
import cv2
import numpy as np
img=cv2.imread('cat.jpg')
# 下面的 None 本应该是输出图像的尺寸,但是因为后边我们设置了缩放因子
res=cv2.resize(img,None,fx=2,fy=2,interpolation=cv2.INTER_CUBIC)
# 这里呢,我们直接设置输出图像的尺寸,所以不用设置缩放因子
height,width=img.shape[:2]
res=cv2.resize(img,(2*width,2*height),interpolation=cv2.INTER_CUBIC)
while(1):
cv2.imshow('res',res)
cv2.imshow('img',img)
if cv2.waitKey(1) & 0xFF == 27:
break
cv2.destroyAllWindows()
二、图像平移
平移就是将对象换一个位置。如果你要沿(x,y)方向移动,移动的距离是(tx,ty),你可以以下面的方式构建移动矩阵:

你可以使用 Numpy 数组构建这个矩阵(数据类型是 np.float32),然后把它传给函数 cv2.warpAffine() 。下面这个例子中,它被移动了(100,50)个像素。
函数 cv2.warpAffine() 的第三个参数的是输出图像的大小,它的格应该是图像的(宽,高)。应该记住的是图像的宽对应的是列数,高对应的是行数。
import cv2
import numpy as np
cap=cv2.VideoCapture(0)
while(1):
# 获取每一帧
ret,frame=cap.read()
# 转换到 HSV
hsv=cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)
# 设定蓝色的阈值
lower_blue=np.array([110,50,50])
upper_blue=np.array([130,255,255])
# 根据阈值构建掩模
mask=cv2.inRange(hsv,lower_blue,upper_blue)
# 对原图像和掩模进行位运算
res=cv2.bitwise_and(frame,frame,mask=mask)
# 显示图像
cv2.imshow('frame',frame)
cv2.imshow('mask',mask)
cv2.imshow('res',res)
if cv2.waitKey(5) & 0xFF == 27:
break
# 关闭窗口
cv2.destroyAllWindows()
三、图像旋转
- 在原点处进行变换的旋转矩阵

- 在任意位置进行变换的旋转矩阵

OpenCV 提供了下面两个函数来实现图像旋转:
- cv2.getRotationMatrix2D(获得旋转矩阵)
- cv2.warpAffine(进行旋转变化)
函数说明
-
rot_mat = cv2.getRotationMatrix2D(center, -45, 1)
- 参数说明:旋转中心,旋转角度,旋转后图像的缩放比例
- center表示中间点的位置,-45表示逆时针旋转45度,1表示进行等比列的缩放
- 可以通过设置旋转中心,缩放因子,以及窗口大小来防止旋转后超出边界的问题
-
cv2.warpAffine(img, rot_mat, (img.shape[1], img.shape[0]))
- 参数说明: img表示输入的图片,rot_mat表示仿射变化矩阵,(image.shape[1], image.shape[0])表示变换后的图片大小
# 下面的例子是在不缩放的情况下将图像旋转 90 度。
import cv2
import numpy as np
img=cv2.imread('cat.jpg',0)
rows,cols=img.shape
# 这里的第一个参数为旋转中心,第二个为旋转角度,第三个为旋转后的缩放因子
M=cv2.getRotationMatrix2D((cols/2,rows/2),90,0.8)
# 第三个参数是输出图像的尺寸中心
dst=cv2.warpAffine(img,M,(cols,rows))
cv2.imshow('cat',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
四、仿射变换
-
仿射变换(Affine Transformation)其实是另外两种简单变换的叠加:一个是线性变换,一个是平移变换
-
仿射变换变化包括缩放(Scale)、平移(transform)、旋转(rotate)、反射(reflection,对图形照镜子)、错切(shear mapping,感觉像是一个图形的倒影),原来的直线仿射变换后还是直线,原来的平行线经过仿射变换之后还是平行线,这就是仿射
-
仿射变换中集合中的一些性质保持不变:
- (1)凸性
- (2)共线性:若几个点变换前在一条线上,则仿射变换后仍然在一条线上
- (3)平行性:若两条线变换前平行,则变换后仍然平行
- (4)共线比例不变性:变换前一条线上两条线段的比例,在变换后比例不变
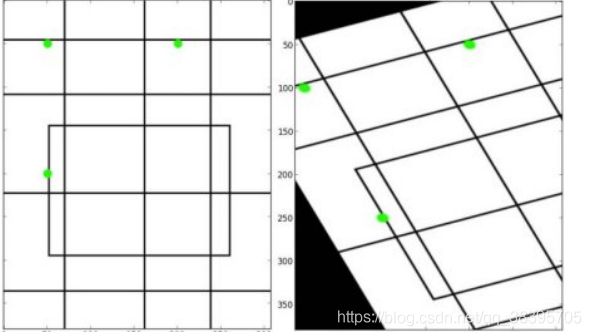
为了创建这个矩阵我们需要从原图像中找到三个点以及他们在输出图像中的位置。
然后cv2.getAffineTransform 会创建一个 2x3 的矩阵,最后这个矩阵会被传给函数 cv2.warpAffine。
- M=cv2.getAffineTransform(src, dst)
- src:原始图像中的三个点的坐标
- dst:变换后的这三个点对应的坐标
- M:根据三个对应点求出的仿射变换矩阵
来看看下面的例子,以及我选择的点(被标记为绿色的点)
import cv2
import numpy as np
from matplotlib import pyplot as plt
img=cv2.imread('dog.jpg')
rows,cols,ch=img.shape
pts1=np.float32([[50,50],[200,50],[50,200]])
pts2=np.float32([[10,100],[200,50],[100,250]])
M=cv2.getAffineTransform(pts1,pts2)
dst=cv2.warpAffine(img,M,(cols,rows))
plt.figure(figsize = (10, 10))
plt.subplot(1, 2, 1), plt.imshow(img, cmap = 'gray'), plt.title('Input')
plt.subplot(1, 2, 2), plt.imshow(dst, cmap = 'gray'), plt.title('Output')
plt.show()

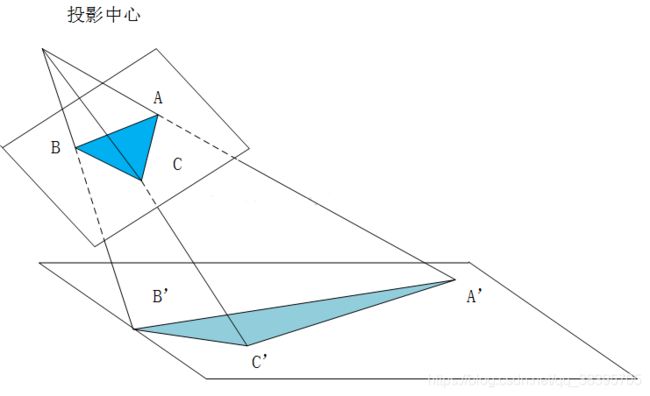
五、透视变换
透视变换(Perspective Transformation)是将成像投影到一个新的视平面(Viewing Plane),也称作投影映射(Projective Mapping)。如下图,通过透视变换ABC变换到A’B’C’。
 对于视角变换,我们需要一个 3x3 变换矩阵。在变换前后直线还是直线。
对于视角变换,我们需要一个 3x3 变换矩阵。在变换前后直线还是直线。
要构建这个变换矩阵,你需要在输入图像上找 4 个点,以及他们在输出图像上对应的位置。这四个点中的任意三个都不能共线。这个变换矩阵可以有函数cv2.getPerspectiveTransform() 构建。然后把这个矩阵传给函数cv2.warpPerspective。
-
cv2.getPerspectiveTransform(src, dst)
参数说明:
- src:源图像中待测矩形的四点坐标
- sdt:目标图像中矩形的四点坐标
返回由源图像中矩形到目标图像矩形变换的矩阵
-
cv2.warpPerspective(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
参数为:
- src:输入图像
- M:变换矩阵
- dsize:目标图像shape
- flags:插值方式,interpolation方法INTER_LINEAR或INTER_NEAREST
- borderMode:边界补偿方式,BORDER_CONSTANT or BORDER_REPLICATE
- borderValue:边界补偿大小,常值,默认为0
-
cv2.perspectiveTransform(src, m[, dst])
参数:
- src:输入的2通道或者3通道的图片
- m:变换矩阵
返回的是相同size的图片
-
区别
- warpPerspective适用于图像。perspectiveTransform适用于一组点。
- 透视变换有很多有趣的应用,比如可以用来做图像倾斜校正
import cv2
import numpy as np
from matplotlib import pyplot as plt
img=cv2.imread('test.jpg')
w,h,ch=img.shape
pts1 = np.float32([[150,50],[400,50],[350,750],[50,750]])
pts2 = np.float32([[20,50],[220,50],[250,750],[30,750]])
M=cv2.getPerspectiveTransform(pts1,pts2)
dst=cv2.warpPerspective(img,M,(270,750))
cv2.namedWindow('output', cv2.WINDOW_NORMAL)
cv2.imshow('input',img)
cv2.imshow('output',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()

参考
- cv2.getPerspectiveTransform 透视变换:http://www.cnblogs.com/aoru45/p/9763983.html
- 有关仿射变换的原理:https://blog.csdn.net/u011681952/article/details/98942207