python点云可视化
Python三种点云可视化方案:mayavi、matplotlib、CloudCompare。
方案一:mayavi可视化点云
安装方式:
pip install mayavi可视化代码:其中'airplane_0001.txt'数据下载地址为:modelnet40点云样例数据-深度学习文档类资源-CSDN下载
from mayavi import mlab
import numpy as np
def viz_mayavi(points):
x = points[:, 0] # x position of point
y = points[:, 1] # y position of point
z = points[:, 2] # z position of point
fig = mlab.figure(bgcolor=(0, 0, 0), size=(640, 360)) #指定图片背景和尺寸
mlab.points3d(x, y, z,
z, # Values used for Color,指定颜色变化依据
mode="point",
colormap='spectral', # 'bone', 'copper', 'gnuplot'
# color=(0, 1, 0), # 也可以使用固定的RGB值
)
mlab.show()
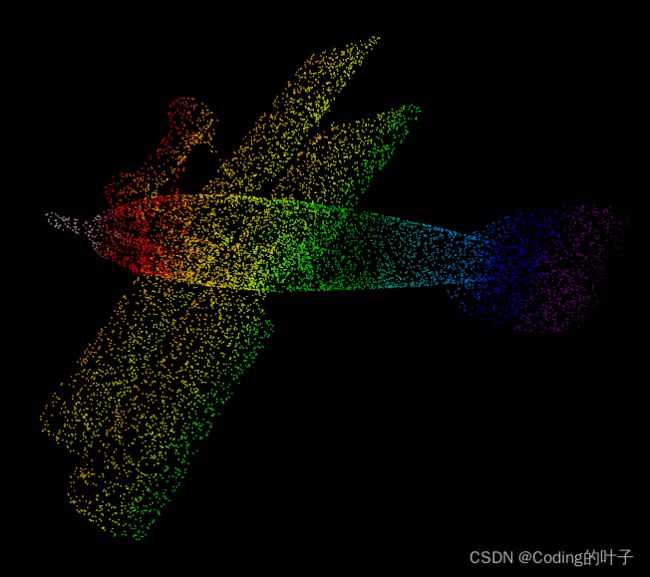
points = np.loadtxt('airplane_0001.txt', delimiter=',')
viz_mayavi(points)显示结果:
方案二、matplotlib可视化点云
代码如下所示:
import matplotlib.pyplot as plt
import numpy as np
def viz_matplot(points):
x = points[:, 0] # x position of point
y = points[:, 1] # y position of point
z = points[:, 2] # z position of point
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(x, # x
y, # y
z, # z
c=z, # height data for color
cmap='rainbow',
marker="x")
ax.axis()
plt.show()
points = np.loadtxt('airplane_0001.txt', delimiter=',')
viz_matplot(points)
显示结果:

方案三、CloudCompare可视化点云
直接用软件打开,无需安装。CloudCompare下载地址:CloudCompare点云可视化软件-深度学习文档类资源-CSDN下载。
显示结果:

Mayavi常用函数
from mayavi import mlab
fig = mlab.figure(bgcolor=(0, 0, 0), size=(640, 360)) #指定图片背景和尺寸
mlab.points3d(x, y, z,
z, # Values used for Color,指定颜色变化依据
mode="point",
colormap='spectral', # 'bone', 'copper', 'gnuplot'
# color=(0, 1, 0), # 也可以使用固定的RGB值
)
opacity=1.0 # 不透明度,取值范围0-1。0.0表示完全透明,1.0表示完全不透明
color=(1, 1, 1) # RGB数值,每个数的取值范围均为0-1。例:(1, 1, 1)表示白色。
colormap='spectral' # 不同的配色方案
mlab.show()#显示结果
# 2D data
img = xxxx # img is a 2D nunmpy array
mlab.imshow(img) #显示二维结果
mlab.surf()
mlab.contour_surf()
mlab.mesh() #将物体表面以网格(mesh)的形式展示出来,即坐标空间的网格化。# 参数:representation = 'wireframe' 可以仅绘制线框。
# 参数:representation = 'surface' 为default值,绘制完整曲面。mlab.mesh(x, y, z, representation='wireframe', line_width=1.0 )