【论文笔记】Shunted Self-Attention via Multi-Scale Token Aggregation 论文笔记及实验
paper:Shunted Self-Attention via Multi-Scale Token Aggregation
github:https://github.com/OliverRensu/Shunted-Transformer
aistudio:没有GPU?Shunted Transformer 飞桨权重迁移在线体验传送门
ViT模型在设计时有个特点:在相同的层中每个token的感受野相同。这限制了self-attention层捕获多尺度特征的能力,从而导致处理多尺度目标的图片时性能下降。针对这个问题,作者提出了shunted self-attention,使得每个attention层可以获取多尺度信息。
目录
一、Shunted Self-Attention
二、Detail-specific Feedforward Layers
三、网络结构
四、实验结果
五、总结
一、Shunted Self-Attention
本篇论文的核心是提出了Shunted Self-Attention,几种不同的ViT模块对比如下:
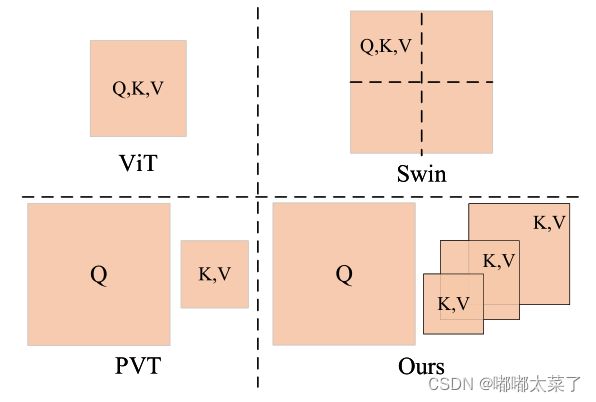
ViT: QKV维度相同,可以得到全局感受野但是计算量大
Swin:划分window,self-attention在窗口内计算减少计算量,同时引入shift操作使得感受野增加
PVT:降低KV的patch数量来降低计算量
shunted Self-Attention:在单个attention层计算时得到多尺度KV,再计算Self-Attention
计算过程如下:

上式中,i表示KV尺度的个数,MTA(multi-scale token aggregation)表示下采样率为ri的特征聚合模块(通过带步长的卷积实现),LE是深度可分离卷积层,用来增强V中相邻像素的联系。
实现代码:
class Attention(nn.Module):
def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0., sr_ratio=1):
super().__init__()
assert dim % num_heads == 0, f"dim {dim} should be divided by num_heads {num_heads}."
self.dim = dim
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.q = nn.Linear(dim, dim, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
self.sr_ratio = sr_ratio
if sr_ratio > 1:
self.act = nn.GELU()
if sr_ratio==8:
self.sr1 = nn.Conv2d(dim, dim, kernel_size=8, stride=8)
self.norm1 = nn.LayerNorm(dim)
self.sr2 = nn.Conv2d(dim, dim, kernel_size=4, stride=4)
self.norm2 = nn.LayerNorm(dim)
if sr_ratio==4:
self.sr1 = nn.Conv2d(dim, dim, kernel_size=4, stride=4)
self.norm1 = nn.LayerNorm(dim)
self.sr2 = nn.Conv2d(dim, dim, kernel_size=2, stride=2)
self.norm2 = nn.LayerNorm(dim)
if sr_ratio==2:
self.sr1 = nn.Conv2d(dim, dim, kernel_size=2, stride=2)
self.norm1 = nn.LayerNorm(dim)
self.sr2 = nn.Conv2d(dim, dim, kernel_size=1, stride=1)
self.norm2 = nn.LayerNorm(dim)
self.kv1 = nn.Linear(dim, dim, bias=qkv_bias)
self.kv2 = nn.Linear(dim, dim, bias=qkv_bias)
self.local_conv1 = nn.Conv2d(dim//2, dim//2, kernel_size=3, padding=1, stride=1, groups=dim//2)
self.local_conv2 = nn.Conv2d(dim//2, dim//2, kernel_size=3, padding=1, stride=1, groups=dim//2)
else:
self.kv = nn.Linear(dim, dim * 2, bias=qkv_bias)
self.local_conv = nn.Conv2d(dim, dim, kernel_size=3, padding=1, stride=1, groups=dim)
self.apply(self._init_weights)
def forward(self, x, H, W):
B, N, C = x.shape
q = self.q(x).reshape(B, N, self.num_heads, C // self.num_heads).permute(0, 2, 1, 3)
if self.sr_ratio > 1:
x_ = x.permute(0, 2, 1).reshape(B, C, H, W)
x_1 = self.act(self.norm1(self.sr1(x_).reshape(B, C, -1).permute(0, 2, 1)))
x_2 = self.act(self.norm2(self.sr2(x_).reshape(B, C, -1).permute(0, 2, 1)))
kv1 = self.kv1(x_1).reshape(B, -1, 2, self.num_heads//2, C // self.num_heads).permute(2, 0, 3, 1, 4)
kv2 = self.kv2(x_2).reshape(B, -1, 2, self.num_heads//2, C // self.num_heads).permute(2, 0, 3, 1, 4)
k1, v1 = kv1[0], kv1[1] #B head N C
k2, v2 = kv2[0], kv2[1]
attn1 = (q[:, :self.num_heads//2] @ k1.transpose(-2, -1)) * self.scale
attn1 = attn1.softmax(dim=-1)
attn1 = self.attn_drop(attn1)
v1 = v1 + self.local_conv1(v1.transpose(1, 2).reshape(B, -1, C//2).
transpose(1, 2).view(B,C//2, H//self.sr_ratio, W//self.sr_ratio)).\
view(B, C//2, -1).view(B, self.num_heads//2, C // self.num_heads, -1).transpose(-1, -2)
x1 = (attn1 @ v1).transpose(1, 2).reshape(B, N, C//2)
attn2 = (q[:, self.num_heads // 2:] @ k2.transpose(-2, -1)) * self.scale
attn2 = attn2.softmax(dim=-1)
attn2 = self.attn_drop(attn2)
v2 = v2 + self.local_conv2(v2.transpose(1, 2).reshape(B, -1, C//2).
transpose(1, 2).view(B, C//2, H*2//self.sr_ratio, W*2//self.sr_ratio)).\
view(B, C//2, -1).view(B, self.num_heads//2, C // self.num_heads, -1).transpose(-1, -2)
x2 = (attn2 @ v2).transpose(1, 2).reshape(B, N, C//2)
x = torch.cat([x1,x2], dim=-1)
else:
kv = self.kv(x).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
k, v = kv[0], kv[1]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C) + self.local_conv(v.transpose(1, 2).reshape(B, N, C).
transpose(1, 2).view(B,C, H, W)).view(B, C, N).transpose(1, 2)
x = self.proj(x)
x = self.proj_drop(x)
return x二、Detail-specific Feedforward Layers
在MLP中加入了Detail Specific分支(depth-wise卷积)来增强相邻像素的联系,与PVT的MLP不同是有了残差连接。
PS:源码中GELU的位置和残差连接的位置顺序与图相反,参考下方代码。

代码如下:
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.dwconv = DWConv(hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x, H, W):
x = self.fc1(x)
x = self.act(x + self.dwconv(x, H, W)) # 残差连接,这里和图画的顺序不一样,图应该画错了
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class DWConv(nn.Module):
def __init__(self, dim=768):
super(DWConv, self).__init__()
self.dwconv = nn.Conv2d(dim, dim, 3, 1, 1, bias=True, groups=dim)
def forward(self, x, H, W):
B, N, C = x.shape
x = x.transpose(1, 2).view(B, C, H, W)
x = self.dwconv(x)
x = x.flatten(2).transpose(1, 2)
return x三、网络结构
网络结构如图所示,整体结构与大部分模型相同,区别在于内部的Transfmer block做出了上述改进,此外,该网络未使用cls_token和pos_embedding。

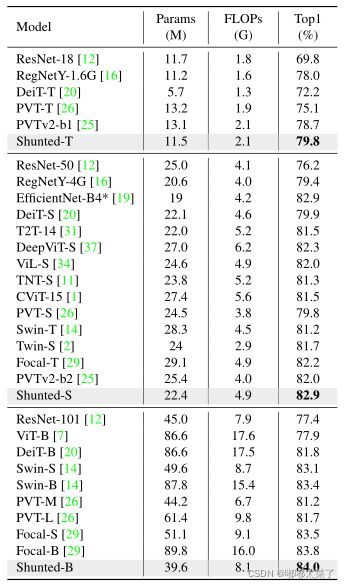
四、实验结果
在ImageNet-1k上表现如下:
五、总结
本文与PVT非常相似,主要改进了Self-Attention模块和MLP模块,获得了非常好的效果,很nice的工作。