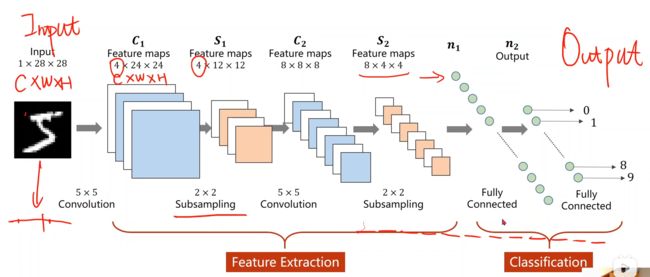
PyTorch入门六 || 卷积神经网络(基础)
由于全连接层直接将图片的像素行连接起来会丢失图片的空间信息,故引入CNN
CNN的过程
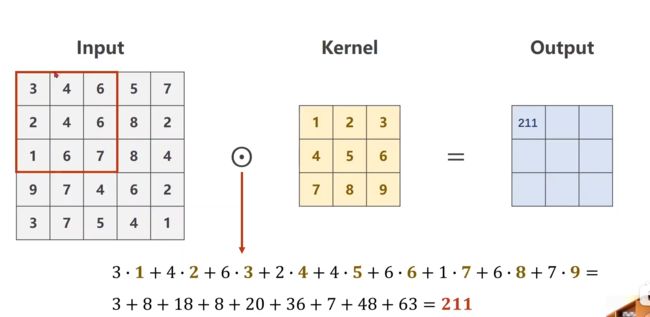
卷积过程
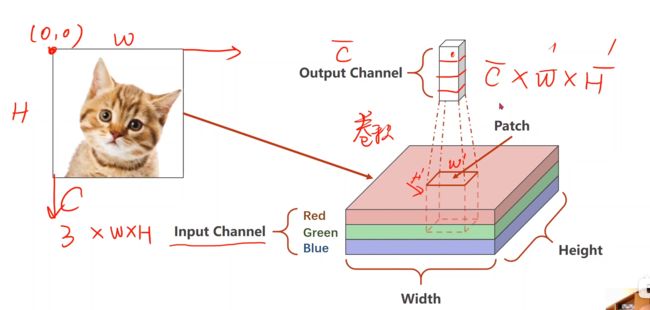
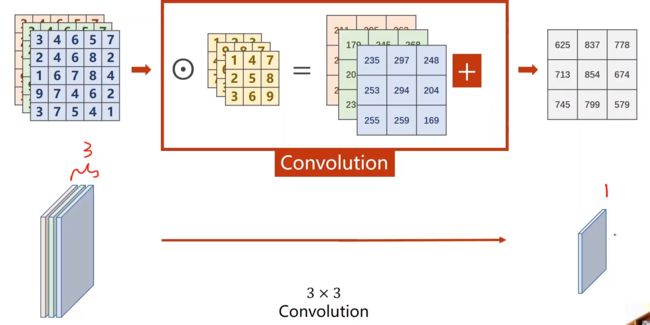
多通道图像卷积过程
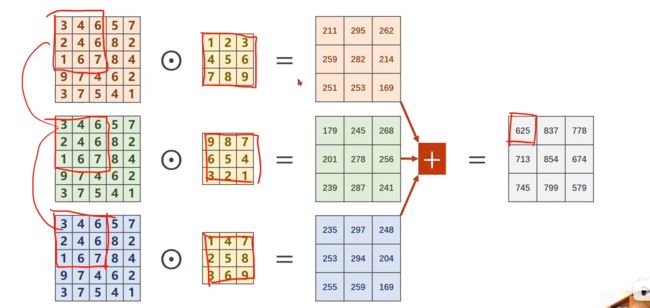
三个通道变成了一个:
n个通道变成m个:
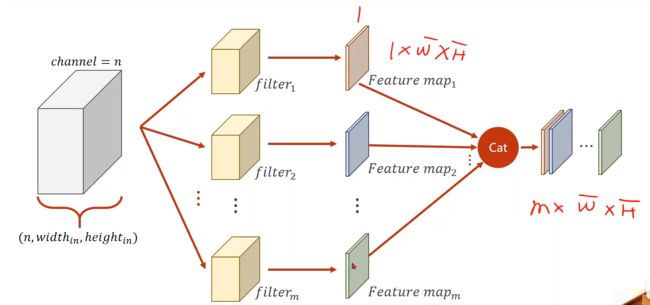
每一个卷积核的通道数与输入通道数一致,有多少个这样的卷积核则输出就有多少个通道
CNN参数的核心就是 输入的通道,输出的通道,卷积核的大小
code
import numpy as np
import torch
in_chaneels,out_channels = 5,10
width,height = 100,100
#大部分卷积核大小为奇数
kernel_size = 3
batch_size = 1
#生成随机张量
input = torch.randn(batch_size,
in_chaneels,
width,
height)
conv_layer = torch.nn.Conv2d(in_chaneels,
out_channels,
kernel_size=(5,3))
output = conv_layer(input)
print(input.shape)
print(output.shape)
print(conv_layer.weight.shape)
padding
如果想保持图像卷积后大小不变,则需要在卷积前对原始图像做padding操作,即填充数字,最常用填充0
N:原始图像;n:卷积核尺寸(一般为奇数)
卷积后的输出为 N+1-n
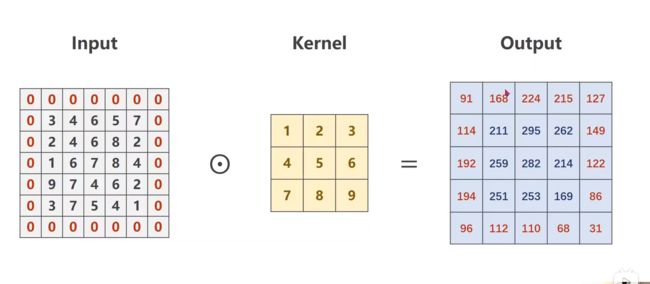
stride
stride即为步长,卷积过程并不是一个接一个,如果步长为2,则中间会跳一个,如果步长为3,则中间会跳两个

N:原始图像;n:卷积核尺寸(一般为奇数);s:步长
卷积后的输出为 ((N-n)/s ) + 1 ;其中 (N-n)/s 为上取整
code
import numpy as np
import torch
input = [3,4,6,5,7,
2,4,6,8,2,
1,6,7,8,4,
9,7,4,6,2,
3,7,5,4,1]
#第一个参数是minibatch
input = torch.Tensor(input).view(1,1,5,5)
# conv_layer = torch.nn.Conv2d(1,1,kernel_size=3,padding=1,bias=False)
conv_layer = torch.nn.Conv2d(1,1,kernel_size=3,stride=2,bias=False)
kernel = torch.Tensor([1,2,3,4,5,6,7,8,9]).view(1,1,3,3)
conv_layer.weight.data = kernel.data
output = conv_layer(input)
print(output)
下采样
最常用的是Max Pooling,该下采样无参数
n*n的Max Pooling 默认stride是n;图片的通道数量不变,每个通道单独计算
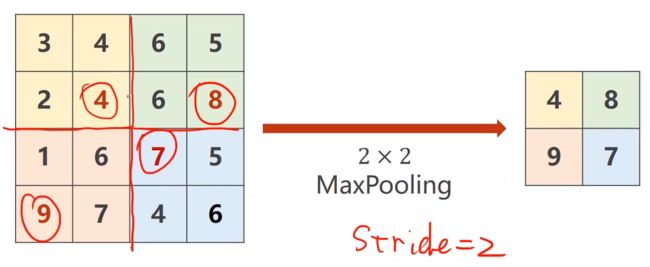
例如上述,将图片划分为2*2一组,则每组中选择一个最大的值
import numpy as np
import torch
input = [3,4,6,5,7,
2,4,6,8,2,
1,6,7,8,4,
9,7,4,6,2,
3,7,5,4,1]
#第一个参数是minibatch
input = torch.Tensor(input).view(1,1,5,5)
#默认stride步长和kernel_size一致
maxpooling_layer = torch.nn.MaxPool2d(kernel_size=2)
output = maxpooling_layer(input)
print(output)
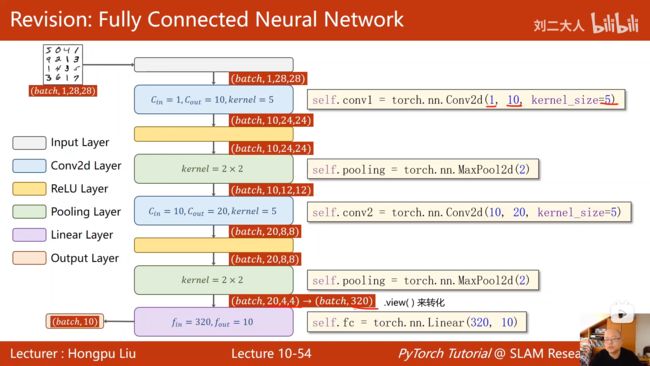
示例
采用 GPU 训练:
#使用 GPU 加速
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model.to(device)
#训练数据加载后 使用下面代码,测试数据同理
x,y = x.to(device),y.to(device)
所有代码
import numpy as np
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets
from torchvision import transforms
from torch.utils.data import DataLoader
import torch
import matplotlib.pyplot as plt
transform = transforms.Compose([
transforms.ToTensor(), #将图像转为tensor向量即每一行叠加起来,会丧失空间结构,且取值为0-1
transforms.Normalize((0.1307,),(0.3081,)) #第一个是均值,第二个是标准差,需要提前算出,这两个参数都是mnist的
])
batch_size = 64
train_dataset = datasets.MNIST(root='../dataset/mnist',
train = True,
download=False,
transform=transform
)
train_loader = DataLoader(train_dataset,
shuffle=True,
batch_size=batch_size)
test_dataset = datasets.MNIST(root='../dataset/mnist',
train = False,
download=False,
transform=transform
)
test_loader = DataLoader(test_dataset,
shuffle=False,
batch_size=batch_size)
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = torch.nn.Conv2d(1,10,(5,5))
self.conv2 = torch.nn.Conv2d(10,20,(5,5))
self.maxpooling = torch.nn.MaxPool2d(2)
self.fc = torch.nn.Linear(320,10)
def forward(self,x):
# 将数据从 (n,1,28,28) 转为 (n,784)
#统计 minibatch 的大小
batch_size = x.size(0)
x = F.relu(self.maxpooling(self.conv1(x)))
x = F.relu(self.maxpooling(self.conv2(x)))
#将批量输入的图片转为 张数 * N
# 注意 批量数据矩阵 一行表示一个数据
x = x.view(batch_size,-1)
x = self.fc(x)
return x
model = Net()
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(),lr=0.01,momentum=0.5)
#使用 GPU 加速
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model.to(device)
def train(epoch):
running_loss = 0.0
# batch_idx 的范围是从 0-937 共938个 因为 batch为64,共60000个数据,所以输入矩阵为 (64*N)
for batch_idx,data in enumerate(train_loader,0):
x ,y = data
x,y = x.to(device),y.to(device) #装入GPU
optimizer.zero_grad()
y_pred = model(x)
loss = criterion(y_pred,y) #计算交叉熵损失
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx%300 == 299:
print("[%d,%5d] loss:%.3f"%(epoch+1,batch_idx+1,running_loss/300))
running_loss = 0.0
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
x,y = data
x,y = x.to(device),y.to(device)
y_pred = model(x)
_,predicted = torch.max(y_pred.data,dim=1)
total += y.size(0)
correct += (predicted==y).sum().item()
print('accuracy on test set:%d%% [%d/%d]'%(100*correct/total,correct,total))
accuracy_list.append(100*correct/total)
if __name__ == '__main__':
accuracy_list = []
for epoch in range(10):
train(epoch)
test()
plt.plot(np.linspace(1,10,10),accuracy_list)
plt.xlabel('epoch')
plt.ylabel('accuracy')
plt.show()
练习:
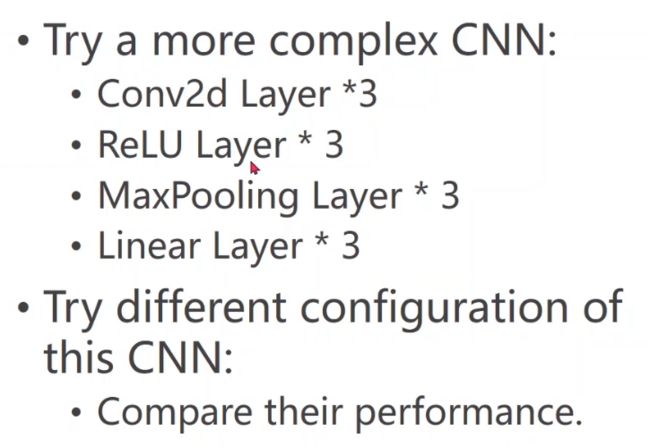
答案
#其余保持不变,关键计算第一个线性层的输入
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = torch.nn.Conv2d(1,10,(5,5))
self.conv2 = torch.nn.Conv2d(10,20,(3,3),padding=1)
self.conv3 = torch.nn.Conv2d(20,30,(3,3),padding=1)
self.maxpooling = torch.nn.MaxPool2d(2)
self.linear1 = torch.nn.Linear(270,128)
self.linear2 = torch.nn.Linear(128,64)
self.linear3 = torch.nn.Linear(64,10)
def forward(self,x):
# 输入数据为 (n,1,28,28) 输出为 (n,10)
#统计 minibatch 的大小
batch_size = x.size(0)
x = F.relu(self.maxpooling(self.conv1(x)))
x = F.relu(self.maxpooling(self.conv2(x)))
x = F.relu(self.maxpooling(self.conv3(x)))
#将批量输入的图片转为 张数 * N
# 注意 批量数据矩阵 一行表示一个数据
x = x.view(batch_size,-1)
x = F.relu(self.linear1(x))
x = F.relu(self.linear2(x))
x = self.linear3(x)
return x