导航系统中坐标系介绍
日常开发中常用到八大坐标系:
1. 惯性坐标系

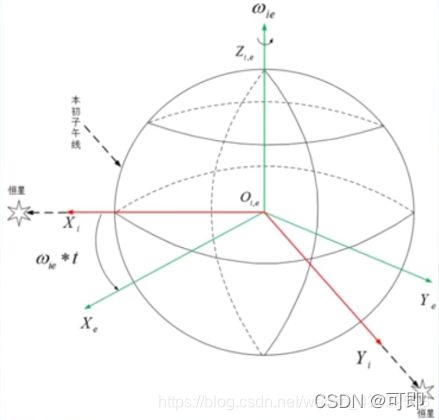
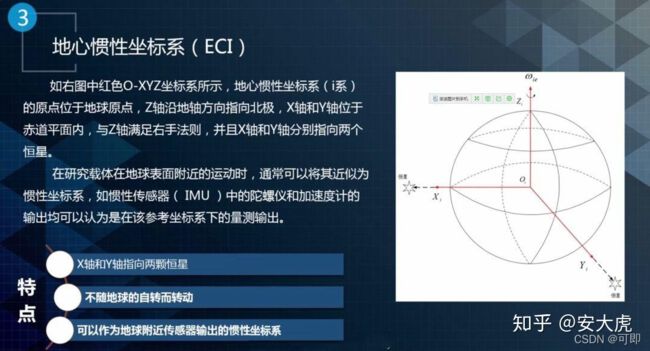 圆心是地球的原点,Z轴沿地轴方向朝向北极, X轴和Y轴位于赤道平面内,与Z轴满足右手法则,并且X轴和Y轴分别指向两个恒星。也就是说不随着地球的自转而发生变化。它是一个非常固定的坐标系。IMU测量得到的加速度,角速度都是相对于这个坐标系的。
圆心是地球的原点,Z轴沿地轴方向朝向北极, X轴和Y轴位于赤道平面内,与Z轴满足右手法则,并且X轴和Y轴分别指向两个恒星。也就是说不随着地球的自转而发生变化。它是一个非常固定的坐标系。IMU测量得到的加速度,角速度都是相对于这个坐标系的。
特点:xy不动,不随着地球的自转而转动,可以作为地球附近传感器输出的惯性坐标系。
在导航中,有:
载体在导航系下的角速度 = 载体相对惯性系的角速度 – 导航系相对于惯性系的角速度
![]()
2. 地球坐标系
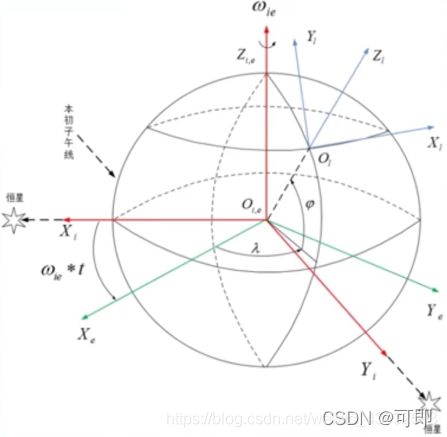
地球坐标系用oxeyeze表示,也称地固坐标系。原点是地球中心;oxe与oye在地球赤道平面内相互垂直,oze指向格林威治子午线(本初子午线 / 0°经线), 是地球的自转轴。e系和地球固连,随着地球自转以角速度7.2921151467e-5相对i系旋转。在实际使用中,通过变换,用经度、纬度和海拔高度表示载体在地球中的位置。如图中绿色直角坐标系所示。
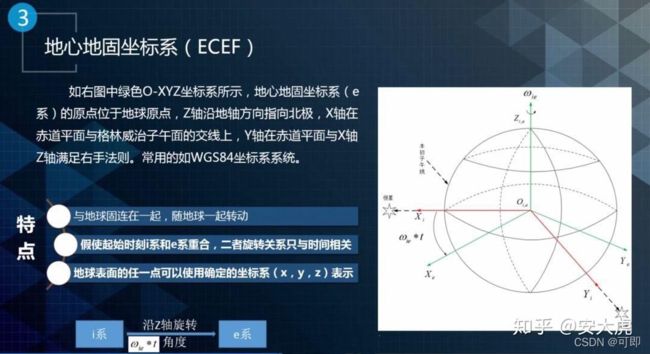 地心地固坐标系也称为e系,它的原点也是地球的原点, Z轴指向北极, 它与前面的ECI的区别就在于它的XY随着地球的自转而转动,它是以地球为基准的。它的X轴指向格林威治的子午面的交线, Y轴在赤道平面内与X轴、Z轴满足右手系法则,常用的如WGS84坐标系。
地心地固坐标系也称为e系,它的原点也是地球的原点, Z轴指向北极, 它与前面的ECI的区别就在于它的XY随着地球的自转而转动,它是以地球为基准的。它的X轴指向格林威治的子午面的交线, Y轴在赤道平面内与X轴、Z轴满足右手系法则,常用的如WGS84坐标系。
特点:与地球固定在一起,随地球一起转动。
3. 地理坐标系
地理坐标系用oxgygzg表示。地理坐标系也称当地水平坐标系,通常使用的有 “东北天”坐标系和“北东地”坐标系。“北东地”坐标系的原点是站心(一般初始位置);oxg指向北方;oyg指向东方;ozg指向是铅锤方向。一般的,载体的姿态描述是横滚角、俯仰角和偏航角。它们均定义在地理坐标系下。如图中蓝色坐标系所示。
 当地水平坐标系,一般也称为L系。如下图所示,它的原点位于载体所在的地球表面,X轴和Y轴在当地水平面内,分别指向东向和北向,Z轴垂直向上,与X轴和Y轴满足右手法则。在导航解算过程中通常也把该坐标系选取为导航坐标系(n系),也称为“东-北-天(E-N-U)”坐标系。
当地水平坐标系,一般也称为L系。如下图所示,它的原点位于载体所在的地球表面,X轴和Y轴在当地水平面内,分别指向东向和北向,Z轴垂直向上,与X轴和Y轴满足右手法则。在导航解算过程中通常也把该坐标系选取为导航坐标系(n系),也称为“东-北-天(E-N-U)”坐标系。
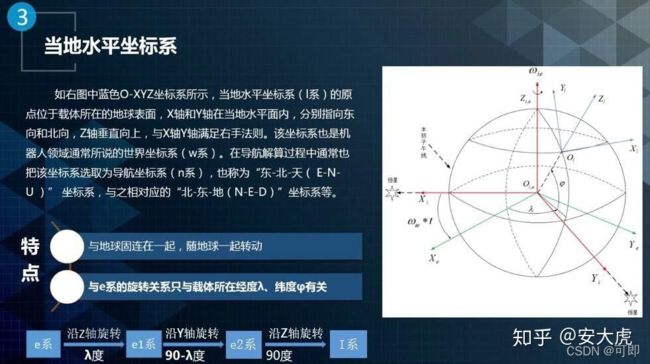 当地水平坐标系一般称之为l系,前面的地心地固坐标系涉及到wgs84坐标系,用于导航的时候,很不好用。
当地水平坐标系一般称之为l系,前面的地心地固坐标系涉及到wgs84坐标系,用于导航的时候,很不好用。
因为是以地心为原点,与平时用的地图不大匹配,所以要引入当地水平坐标系。当地水平坐标系的特点是他的原点一般定义在载体上面,它的朝向xyz经常定义为enu,就是东向北向和天向,相反就是三个轴相反就是北东地,但一般情况下用enu坐标系。
坐标系在导航中称之为n系,它的特点是原点在载体上面,朝向是enu。并且和地球固链在一起,也随着地球转动。E系的旋转关系,是和当地坐标系所在位置有关,大地坐标系很多时候有xyz表示,也有经纬度表示,经纬度可以一对一转换为xy。
大地的xy怎么去得到它?怎么从e系到l系:
通过z轴的旋转,在绕道经度的旋转,再到纬度的旋转,然后在绕到z轴的一个旋转,最后得到当地坐标系。
4. utm坐标系
 utm地图是根据经纬度做的划分,通过经度吧地球分成60个区域,每6度一个区域,北京在第50的区域,南北也做了划分,相当于把地球分成了很多很多块。
utm地图是根据经纬度做的划分,通过经度吧地球分成60个区域,每6度一个区域,北京在第50的区域,南北也做了划分,相当于把地球分成了很多很多块。
在高纬度,因为地球像一个球,到最高纬度的时候,变换(误差)特别大,所以它有个限定,到了北纬(高纬度),用的换算公式不一样。
我们用这个坐标系做输出,它的坐标xy,再加上刚才所说的投影带的代号,就是0到59或者1到60,一般情况下1到60,加一个代号,就知道xy坐标,就可以换算成大地坐标系xyz,也换算成经纬度。
5. 车体坐标系
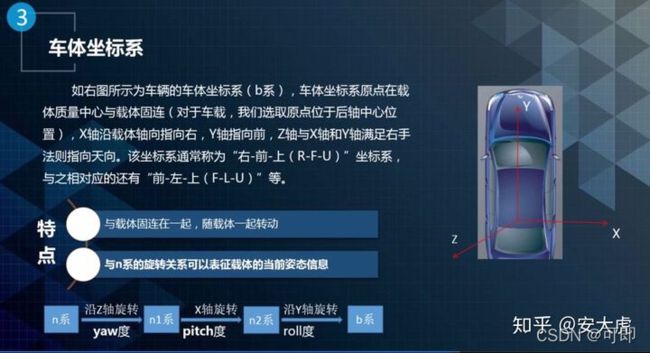
车体是个刚体,imu经常安装在两个车轴中间,后面车轴的中间,这么做是为了保证它的稳定性,因此这个点我们称之为车的原点,然后我们再建一个包围盒,就知道车的每一位置的坐标了。
我们建立这个坐标系是为了和当地坐标系匹配起来,然后去做计算,这个坐标系需要在我们所依赖的导航坐标系下知道它的位姿的变换,在utm坐标系
下知道它的位置情况。
这个坐标系是与载体固连在一起,它随着载体运动而运动,它是一个局部坐标系
,它与n系(导航坐标系),或者当地水平坐标系,通过旋转关系来表示现在车的姿态。因为前面讲enu东向北向天向,那这个车如果在这个坐标系下面,我们是一个什么样的姿态。我们就知道它的三个角度,和现在车体坐标系的三个坐标轴和原来坐标系之间角度的差异,就是它的姿态。
6. imu坐标系
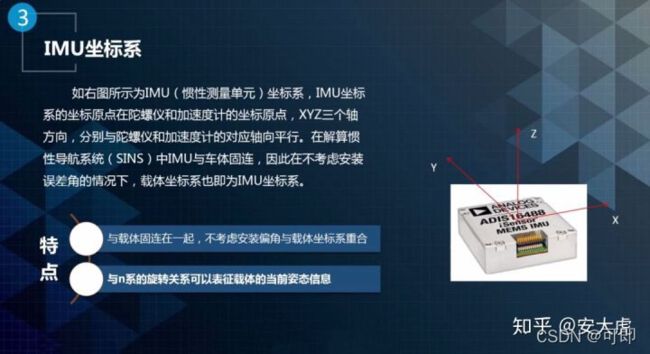 imu就装在车体车轴中心的一个点上,imu坐标系和载体坐标系一样,安装的时候有小误差,比如说现在存在安装精度问题,有可能体现在yaw角度上有一些误差,这些误差如果通过外参的方式把它补偿之后,它的坐标系和前面载体坐标系其实是一样的。它也是和载体固定连在一起,和n系有一个旋转关系。
imu就装在车体车轴中心的一个点上,imu坐标系和载体坐标系一样,安装的时候有小误差,比如说现在存在安装精度问题,有可能体现在yaw角度上有一些误差,这些误差如果通过外参的方式把它补偿之后,它的坐标系和前面载体坐标系其实是一样的。它也是和载体固定连在一起,和n系有一个旋转关系。
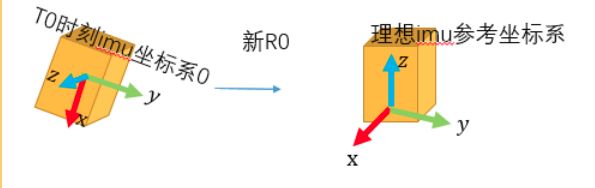
理想的imu参考坐标系就是世界坐标系,n系
7. 相机坐标系
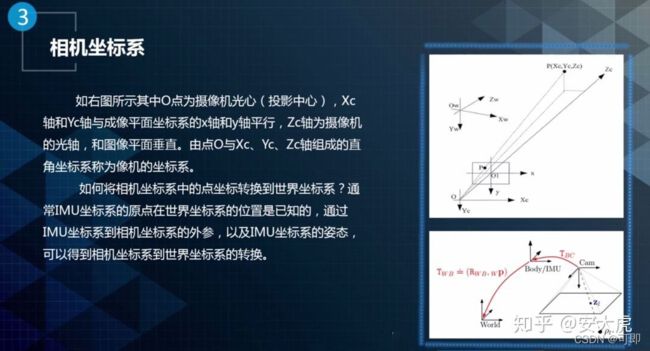 如果将相机坐标系中的点坐标转换为世界坐标系,通常imu坐标系的原点在世界坐标系的位置已知,通过imu坐标系到相机坐标系的外参,以及imu坐标系的姿态,可以得到相机坐标系到世界坐标系的转换)
如果将相机坐标系中的点坐标转换为世界坐标系,通常imu坐标系的原点在世界坐标系的位置已知,通过imu坐标系到相机坐标系的外参,以及imu坐标系的姿态,可以得到相机坐标系到世界坐标系的转换)
大家对相机比较熟悉,这个坐标系比较简单,就是以自己的光心为原点,xy一般有相平面决定,x朝右,y轴朝下建立一个局部坐标系。相机坐标系不会和其他全局坐标系直接连接起来,因为车已经选了一个原点,就是imu原点,把相机坐标系和imu坐标系关联起来,可以通过一个外参,它两个之间其实就差一个旋转和平移,如果把它算出来,我们就知道他们之间的一个刚性变化,比如我们知道imu坐标系世界坐标系的姿态和位置,就可以转化为相机坐标系。
8. 激光雷达坐标系
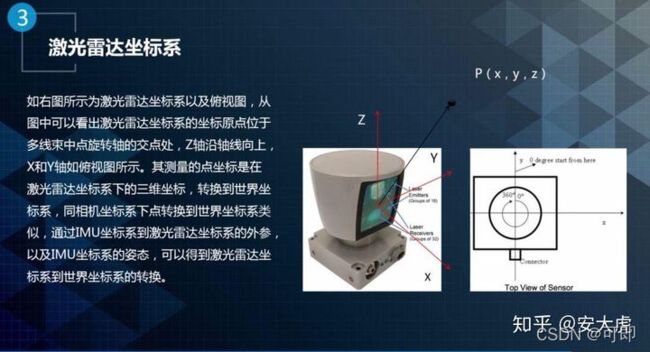 激光雷达坐标系和相机坐标系很相似,但是它的局部坐标系的定义不一样,我们可以看到64线激光是往前走的话是x,相当于z朝上。如果平时我们也不会这么做,做完点云定位得到位置姿态,也是转化到imu下面去,所以他只是和imu之间有外参的变换,并不是说直接用于世界坐标系的作用。
激光雷达坐标系和相机坐标系很相似,但是它的局部坐标系的定义不一样,我们可以看到64线激光是往前走的话是x,相当于z朝上。如果平时我们也不会这么做,做完点云定位得到位置姿态,也是转化到imu下面去,所以他只是和imu之间有外参的变换,并不是说直接用于世界坐标系的作用。
无人车定位信息中所涉及到的坐标系
 在我们日常的开发中有imu坐标系,有enu坐标系,有车体坐标系。其实他们之间都是一个转换关系,所有的坐标系都是输出umt坐标系下的xy,imu的姿态,四元数相对于当地水平坐标系(n系),具体表现是姿态的四元数。速度可以理解为如它在gps下有一个速度分解到了enu坐标系,也可以说是enu坐标系的投影。
在我们日常的开发中有imu坐标系,有enu坐标系,有车体坐标系。其实他们之间都是一个转换关系,所有的坐标系都是输出umt坐标系下的xy,imu的姿态,四元数相对于当地水平坐标系(n系),具体表现是姿态的四元数。速度可以理解为如它在gps下有一个速度分解到了enu坐标系,也可以说是enu坐标系的投影。
另外还输出一些和车体相关的信息,比如说车体姿态四元数,车体姿态我们提到imu,imu和车体安装会有小的偏差,虽然误差很小,比如说1度2度,这对控制来说有问题,我们需要很精准,要把这些补偿到车体上去。
具体用那种坐标系进行转换,我们需要在数采之前对需要保存的rosbag进行消息定义。