运行结果
源码解读
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
void find_feature_matches(
const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches);
Point2d pixel2cam(const Point2d &p, const Mat &K);
void pose_estimation_3d3d(
const vector<Point3f> &pts1,
const vector<Point3f> &pts2,
Mat &R, Mat &t
);
void bundleAdjustment(
const vector<Point3f> &points_3d,
const vector<Point3f> &points_2d,
Mat &R, Mat &t
);
class VertexPose : public g2o::BaseVertex<6, Sophus::SE3d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
virtual void setToOriginImpl() override {
_estimate = Sophus::SE3d();
}
virtual void oplusImpl(const double *update) override {
Eigen::Matrix<double, 6, 1> update_eigen;
update_eigen << update[0], update[1], update[2], update[3], update[4], update[5];
_estimate = Sophus::SE3d::exp(update_eigen) * _estimate;
}
virtual bool read(istream &in) override {}
virtual bool write(ostream &out) const override {}
};
class EdgeProjectXYZRGBDPoseOnly : public g2o::BaseUnaryEdge<3, Eigen::Vector3d, VertexPose> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgeProjectXYZRGBDPoseOnly(const Eigen::Vector3d &point) : _point(point) {}
virtual void computeError() override {
const VertexPose *pose = static_cast<const VertexPose *> ( _vertices[0] );
_error = _measurement - pose->estimate() * _point;
}
virtual void linearizeOplus() override {
VertexPose *pose = static_cast<VertexPose *>(_vertices[0]);
Sophus::SE3d T = pose->estimate();
Eigen::Vector3d xyz_trans = T * _point;
_jacobianOplusXi.block<3, 3>(0, 0) = -Eigen::Matrix3d::Identity();
_jacobianOplusXi.block<3, 3>(0, 3) = Sophus::SO3d::hat(xyz_trans);
}
bool read(istream &in) {}
bool write(ostream &out) const {}
protected:
Eigen::Vector3d _point;
};
int main(int argc, char **argv) {
if (argc != 1) {
cout << "usage: pose_estimation_3d3d img1 img2 depth1 depth2" << endl;
return 1;
}
Mat img_1 = imread("/home/q/projects/slambook2/ch7/1.png", CV_LOAD_IMAGE_COLOR);
Mat img_2 = imread("/home/q/projects/slambook2/ch7/2.png", CV_LOAD_IMAGE_COLOR);
vector<KeyPoint> keypoints_1, keypoints_2;
vector<DMatch> matches;
find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches);
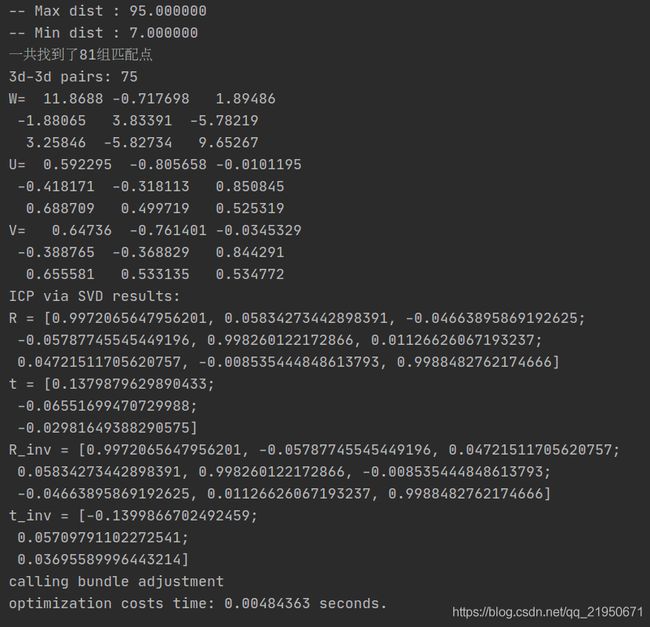
cout << "一共找到了" << matches.size() << "组匹配点" << endl;
Mat depth1 = imread("/home/q/projects/slambook2/ch7/1_depth.png", CV_LOAD_IMAGE_UNCHANGED);
Mat depth2 = imread("/home/q/projects/slambook2/ch7/2_depth.png", CV_LOAD_IMAGE_UNCHANGED);
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
vector<Point3f> pts1, pts2;
for (DMatch m:matches) {
ushort d1 = depth1.ptr<unsigned short>(int(keypoints_1[m.queryIdx].pt.y))[int(keypoints_1[m.queryIdx].pt.x)];
ushort d2 = depth2.ptr<unsigned short>(int(keypoints_2[m.trainIdx].pt.y))[int(keypoints_2[m.trainIdx].pt.x)];
if (d1 == 0 || d2 == 0)
continue;
Point2d p1 = pixel2cam(keypoints_1[m.queryIdx].pt, K);
Point2d p2 = pixel2cam(keypoints_2[m.trainIdx].pt, K);
float dd1 = float(d1) / 5000.0;
float dd2 = float(d2) / 5000.0;
pts1.push_back(Point3f(p1.x * dd1, p1.y * dd1, dd1));
pts2.push_back(Point3f(p2.x * dd2, p2.y * dd2, dd2));
}
cout << "3d-3d pairs: " << pts1.size() << endl;
Mat R, t;
pose_estimation_3d3d(pts1, pts2, R, t);
cout << "ICP via SVD results: " << endl;
cout << "R = " << R << endl;
cout << "t = " << t << endl;
cout << "R_inv = " << R.t() << endl;
cout << "t_inv = " << -R.t() * t << endl;
cout << "calling bundle adjustment" << endl;
bundleAdjustment(pts1, pts2, R, t);
for (int i = 0; i < 5; i++) {
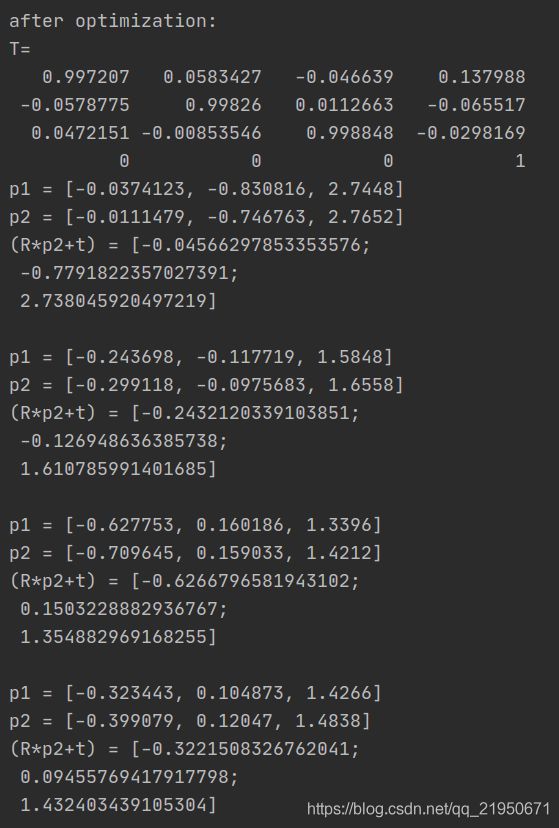
cout << "p1 = " << pts1[i] << endl;
cout << "p2 = " << pts2[i] << endl;
cout << "(R*p2+t) = " <<
R * (Mat_<double>(3, 1) << pts2[i].x, pts2[i].y, pts2[i].z) + t
<< endl;
cout << endl;
}
}
void find_feature_matches(const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches) {
Mat descriptors_1, descriptors_2;
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
vector<DMatch> match;
matcher->match(descriptors_1, descriptors_2, match);
double min_dist = 10000, max_dist = 0;
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = match[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
for (int i = 0; i < descriptors_1.rows; i++) {
if (match[i].distance <= max(2 * min_dist, 30.0)) {
matches.push_back(match[i]);
}
}
}
Point2d pixel2cam(const Point2d &p, const Mat &K) {
return Point2d(
(p.x - K.at<double>(0, 2)) / K.at<double>(0, 0),
(p.y - K.at<double>(1, 2)) / K.at<double>(1, 1)
);
}
void pose_estimation_3d3d(const vector<Point3f> &pts1, const vector<Point3f> &pts2, Mat &R, Mat &t) {
Point3f p1, p2;
int N = pts1.size();
for (int i = 0; i < N; i++) {
p1 += pts1[i];
p2 += pts2[i];
}
p1 = Point3f(Vec3f(p1) / N);
p2 = Point3f(Vec3f(p2) / N);
vector<Point3f> q1(N), q2(N);
for (int i = 0; i < N; i++) {
q1[i] = pts1[i] - p1;
q2[i] = pts2[i] - p2;
}
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for (int i = 0; i < N; i++) {
W += Eigen::Vector3d(q1[i].x, q1[i].y, q1[i].z) * Eigen::Vector3d(q2[i].x, q2[i].y, q2[i].z).transpose();
}
cout << "W=" << W << endl;
Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
cout << "U=" << U << endl;
cout << "V=" << V << endl;
Eigen::Matrix3d R_ = U * (V.transpose());
if (R_.determinant() < 0) {
R_ = -R_;
}
Eigen::Vector3d t_ = Eigen::Vector3d(p1.x, p1.y, p1.z) - R_ * Eigen::Vector3d(p2.x, p2.y, p2.z);
R = (Mat_<double>(3, 3) <<
R_(0, 0), R_(0, 1), R_(0, 2),
R_(1, 0), R_(1, 1), R_(1, 2),
R_(2, 0), R_(2, 1), R_(2, 2)
);
t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0));
}
void bundleAdjustment(const vector<Point3f> &pts1, const vector<Point3f> &pts2, Mat &R, Mat &t) {
typedef g2o::BlockSolverX BlockSolverType;
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType;
auto solver = new g2o::OptimizationAlgorithmLevenberg(g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm(solver);
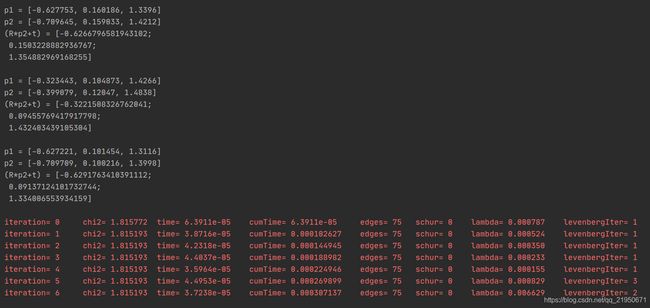
optimizer.setVerbose(true);
VertexPose *pose = new VertexPose();
pose->setId(0);
pose->setEstimate(Sophus::SE3d());
optimizer.addVertex(pose);
for (size_t i = 0; i < pts1.size(); i++) {
EdgeProjectXYZRGBDPoseOnly *edge = new EdgeProjectXYZRGBDPoseOnly(Eigen::Vector3d(pts2[i].x, pts2[i].y, pts2[i].z));
edge->setVertex(0, pose);
edge->setMeasurement(Eigen::Vector3d(pts1[i].x, pts1[i].y, pts1[i].z));
edge->setInformation(Eigen::Matrix3d::Identity());
optimizer.addEdge(edge);
}
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.initializeOptimization();
optimizer.optimize(10);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "optimization costs time: " << time_used.count() << " seconds." << endl;
cout << endl << "after optimization:" << endl;
cout << "T=\n" << pose->estimate().matrix() << endl;
Eigen::Matrix3d R_ = pose->estimate().rotationMatrix();
Eigen::Vector3d t_ = pose->estimate().translation();
R = (Mat_<double>(3, 3) <<
R_(0, 0), R_(0, 1), R_(0, 2),
R_(1, 0), R_(1, 1), R_(1, 2),
R_(2, 0), R_(2, 1), R_(2, 2)
);
t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0));
}