强化学习-PPO
论文地址Proximal Policy Optimization Algorithms
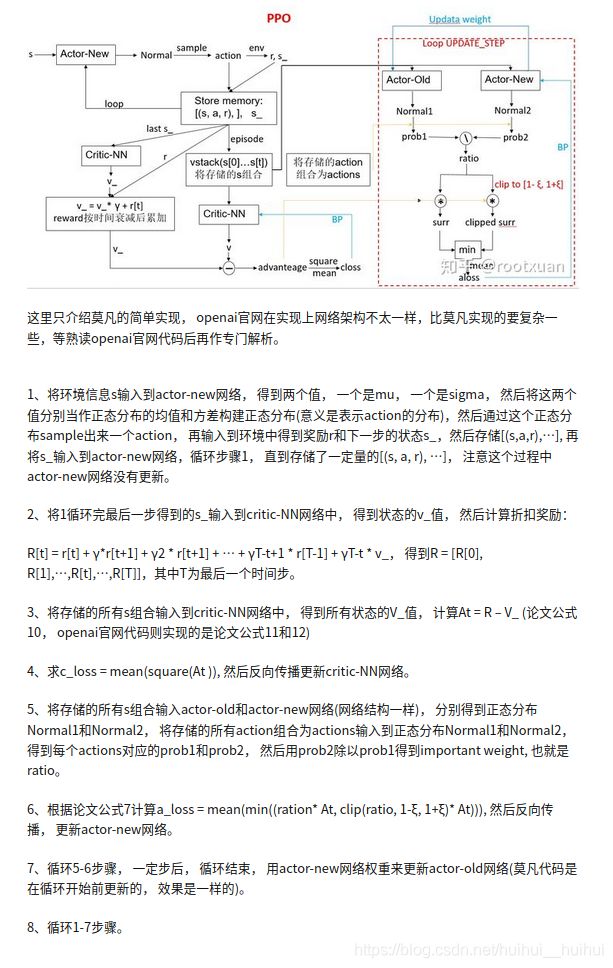
流程图
参考强化学习–从DQN到PPO, 流程详解
代码实现
参考PPO实现(Pendulum-v0)
import gym
import argparse
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import matplotlib.pyplot as plt
class ActorNet(nn.Module):
def __init__(self, n_states, bound):
super(ActorNet, self).__init__()
self.n_states = n_states
self.bound = bound
self.layer = nn.Sequential(
nn.Linear(self.n_states, 128),
nn.ReLU()
)
self.mu_out = nn.Linear(128, 1)
self.sigma_out = nn.Linear(128, 1)
def forward(self, x):
x = F.relu(self.layer(x))
mu = self.bound * torch.tanh(self.mu_out(x))
sigma = F.softplus(self.sigma_out(x))
return mu, sigma
class CriticNet(nn.Module):
def __init__(self, n_states):
super(CriticNet, self).__init__()
self.n_states = n_states
self.layer = nn.Sequential(
nn.Linear(self.n_states, 128),
nn.ReLU(),
nn.Linear(128, 1)
)
def forward(self, x):
v = self.layer(x)
return v
class PPO(nn.Module):
def __init__(self, n_states, n_actions, bound, args):
super().__init__()
self.n_states = n_states
self.n_actions = n_actions
self.bound = bound
self.lr = args.lr
self.gamma = args.gamma
self.epsilon = args.epsilon
self.a_update_steps = args.a_update_steps
self.c_update_steps = args.c_update_steps
self._build()
def _build(self):
self.actor_model = ActorNet(n_states, bound)
self.actor_old_model = ActorNet(n_states, bound)
self.actor_optim = torch.optim.Adam(self.actor_model.parameters(), lr=self.lr)
self.critic_model = CriticNet(n_states)
self.critic_optim = torch.optim.Adam(self.critic_model.parameters(), lr=self.lr)
def choose_action(self, s):
s = torch.FloatTensor(s)
mu, sigma = self.actor_model(s)
dist = torch.distributions.Normal(mu, sigma)
action = dist.sample()
return np.clip(action, -self.bound, self.bound)
def discount_reward(self, rewards, s_):
s_ = torch.FloatTensor(s_)
target = self.critic_model(s_).detach() # torch.Size([1])
target_list = []
for r in rewards[::-1]:
target = r + self.gamma * target
target_list.append(target)
target_list.reverse()
target_list = torch.cat(target_list) # torch.Size([batch])
return target_list
def actor_learn(self, states, actions, advantage):
states = torch.FloatTensor(states)
actions = torch.FloatTensor(actions).reshape(-1, 1)
mu, sigma = self.actor_model(states)
pi = torch.distributions.Normal(mu, sigma)
old_mu, old_sigma = self.actor_old_model(states)
old_pi = torch.distributions.Normal(old_mu, old_sigma)
ratio = torch.exp(pi.log_prob(actions) - old_pi.log_prob(actions))
surr = ratio * advantage.reshape(-1, 1) # torch.Size([batch, 1])
loss = -torch.mean(torch.min(surr, torch.clamp(ratio, 1 - self.epsilon, 1 + self.epsilon) * advantage.reshape(-1, 1)))
self.actor_optim.zero_grad()
loss.backward()
self.actor_optim.step()
def critic_learn(self, states, targets):
states = torch.FloatTensor(states)
v = self.critic_model(states).reshape(1, -1).squeeze(0)
loss_func = nn.MSELoss()
loss = loss_func(v, targets)
self.critic_optim.zero_grad()
loss.backward()
self.critic_optim.step()
def cal_adv(self, states, targets):
states = torch.FloatTensor(states)
v = self.critic_model(states) # torch.Size([batch, 1])
advantage = targets - v.reshape(1, -1).squeeze(0)
return advantage.detach() # torch.Size([batch])
def update(self, states, actions, targets):
self.actor_old_model.load_state_dict(self.actor_model.state_dict()) # 首先更新旧模型
advantage = self.cal_adv(states, targets)
for i in range(self.a_update_steps): # 更新多次
self.actor_learn(states, actions, advantage)
for i in range(self.c_update_steps): # 更新多次
self.critic_learn(states, targets)
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--n_episodes', type=int, default=600)
parser.add_argument('--len_episode', type=int, default=200)
parser.add_argument('--lr', type=float, default=0.0001)
parser.add_argument('--batch', type=int, default=32)
parser.add_argument('--gamma', type=float, default=0.9)
parser.add_argument('--seed', type=int, default=10)
parser.add_argument('--epsilon', type=float, default=0.2)
parser.add_argument('--c_update_steps', type=int, default=10)
parser.add_argument('--a_update_steps', type=int, default=10)
args = parser.parse_args()
env = gym.make('Pendulum-v0')
env.seed(args.seed)
torch.manual_seed(args.seed)
n_states = env.observation_space.shape[0]
n_actions = env.action_space.shape[0]
bound = env.action_space.high[0]
agent = PPO(n_states, n_actions, bound, args)
all_ep_r = []
for episode in range(args.n_episodes):
ep_r = 0
s = env.reset()
states, actions, rewards = [], [], []
for t in range(args.len_episode):
a = agent.choose_action(s)
s_, r, done, _ = env.step(a)
ep_r += r
states.append(s)
actions.append(a)
rewards.append((r + 8) / 8) # 参考了网上的做法
s = s_
if (t + 1) % args.batch == 0 or t == args.len_episode - 1: # N步更新
states = np.array(states)
actions = np.array(actions)
rewards = np.array(rewards)
targets = agent.discount_reward(rewards, s_) # 奖励回溯
agent.update(states, actions, targets) # 进行actor和critic网络的更新
states, actions, rewards = [], [], []
print('Episode {:03d} | Reward:{:.03f}'.format(episode, ep_r))
if episode == 0:
all_ep_r.append(ep_r)
else:
all_ep_r.append(all_ep_r[-1] * 0.9 + ep_r * 0.1) # 平滑
plt.plot(np.arange(len(all_ep_r)), all_ep_r)
plt.show()