作者:林锦豪 | 旷视 MegEngine 架构师
前言
做 arm 侧算子开发时,不能不关心的就是性能。本文主要就是介绍 arm 算子性能优化的常用思路,做为一个入门级的参考。文章以 ARM Cortex a55 上的 GaussianBlur 优化为例展开,并在文末对 arm 性能优化思路做了一个总结。
GaussianBlur 的优化
Q1: 什么是 GaussianBlur?
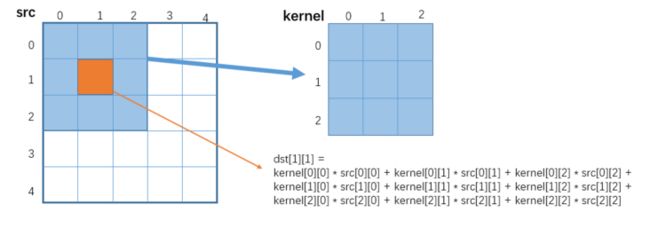
GaussianBlur 是一种线性平滑滤波。它的计算过程是:原图每一个点都和周边点进行加权求和,得到对应位置的输出,权重矩阵是 kernel。以 kernel_size=3 为例,如图:
示例代码如下:
// 示例代码 1
/*
src : float[h][w]
kernel : float[3][3]
受限于篇幅,本文的代码仅做演示,不考虑图像的边界处理
*/
for(int i = 1 ; i < h-1 ; ++i ){
for(int j = 1 ; j < w-1; ++j){
dst[i][j] =
src[i-1][j-1] * kernel[0][0] + src[i-1][j] * kernel[0][1] + src[i-1][j+1] * kernel[0][2] +
src[i][j-1] * kernel[1][0] + src[i][j] * kernel[1][1] + src[i][j+1] * kernel[1][2] +
src[i+1][j-1] * kernel[2][0] + src[i+1][j] * kernel[2][1] + src[i+1][j+1] * kernel[2][2]
}
}而 kernel 的值是由高斯公式 1 算出,并做了归一化。比如常用的 kernel_size=3 的 kernel 为:
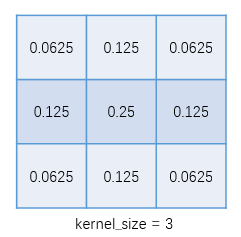
它可以由两个向量相乘得到: $\{0.25, 0.5, 0.25\}^T * \{0.25, 0.5, 0.25\}$。
Q2: 如何进行优化?
接下来,笔者将以 kernel_size=3 的 GaussianBlur 为例,介绍一些常见的优化思路:
Point 1: 首先考虑算法层面的优化--可分离滤波
根据笔者的经验,性能优化的主要效益来自于算法层面的优化,这是从根本上减少计算量,所以第一步是考虑算法层面的优化。对于高斯滤波来说,它是一个可分离滤波, 这意味着
- 它的 kernel 可以拆成行方向和列方向两个向量的乘积。即 $\{0.25, 0.5, 0.25\}^T * \{0.25, 0.5, 0.25\}$
- 示例代码 1 的逻辑等效于,先做一个方向的卷积,再做另一个方向的卷积。代码如下:
// 示例代码 2
/*
buf : float[3][w], 用来保存行内卷积的中间计算结果
src :float[h][w], 输入图像,类型为 F32C1, 高为 h, 宽为 w
kx : float[3] , x 方向上的卷积
ky : float[3] , y 方向上的卷积,此处和 kx 相同
*/
// ------------------ 先计算前 2 行的行内卷积,保存到 buf 中 ----------------------
for(int i = 0; i < ksize-1; ++i){
for(int j = 1; j < w-1 ; ++j ){
buf[i][j] = src[i][j-1] * kx[0] + src[i][j] * kx[1] + src[i][j+1] * kx[2];
}
}
// 每算一行新的,凑齐 3 行,做一次行间的卷积。 期间更新 buf
#define IDX(n) (n%3)
for(int i = 1; i < h-1; ++i ){
for(int j = 1; j < w-1; ++j){
buf[IDX(i+1)][j] = src[i+1][j-1] * kx[0] + src[i+1][j] * kx[1] + src[i+1][j+1] * kx[2];
dst[i][j] = buf[IDX(i-1)][j-1] * ky[0] + buf[IDX(i)][j-1] * ky[1] + buf[IDX(i+1)][j-1] * ky[2];
}
}分析一下: 示例代码 1 的时间复杂度为 $O(h * w * kx * ky)$, 示例代码 2 的时间复杂度为 $O(h * w * (kx + ky) )$,可以看到时间复杂度变小了。
简单总结一下:算子优化首先从数学角度出发,看能不能找到等效或者近似的算法来降低算法的复杂度。而类似的 GaussianBlur 的优化思路还有'Stack Blur' 2 (用多个 boxfilter 去模拟 gaussianblur); 转换到频域上计算等。
Point 2:考虑减少重复计算
做完 Point1 算法设计的优化,大幅减少了计算量,但算法实现过程可能会有不少重复计算,所以第二步接着考虑减少重复计算。这里还是以示例代码 2 为例,关注以下几个点:
- 通过引入 buf 并借助 IDX(n) 宏,复用了前 2 行的行内计算结果。由原先的每做一次行间计算,需要先做 3 次行内计算,变成了每做一次行间计算,只需要做 1 次行内计算。从而减少了计算量
- 因为
buf[i][j] = src[i][j-1] * kx[0] + src[i][j] * kx[1] + src[i][j+1] * kx[2];里 kx[0] 和 kx[2] 都是 0.25。所以可以优化成buf[i][j] = (src[i][j-1] + src[i][j+1] )* kx[0] + src[i][j] * kx[1] ;从而由 3 次乘法 2 次加法变成了 2 次乘法 2 次加法。
简单总结一下: 性能优化过程中,需要关注哪些计算是之前做过的,进而设计一个数据结构去缓存复用它。同时关注算法本身的一些特性(比如高斯核是对称的),看看能不能减少一些计算量。
Point 3: SIMD 提高数据级并行度
前 2 步基本保证运算是必需且最少的,第三步就需要考虑提高数据级并行度。
数据级并行(Data Level Parallelism,简称 DLP),主要手段是 SIMD/SIMT,简单理解成一条指令同时处理多个数据。ARM 上主要是使用 NEON 指令集/SVE 指令集。受限于篇幅,以下的示例代码,只拿示例代码 2 中 先计算前 2 行的行内卷积 的部分做演示。
// 示例代码 3
constexpr size_t step = 128/sizeof(float); // 一条 NEON 指令能处理的数据长度为 128bit, 可以并行处理 step 个 float
flaot32x4_t vload[3]; // 暂存 load 的结果,用于向量化计算
float32x4_t k[3];
k[0] = vdupq_n_f32(kx[0]); // k[0] = {0.25, 0.25, 0.25}
k[1] = vdupq_n_f32(kx[1]); // k[1] = {0.5, 0.5, 0.5}
for(int i = 0; i < ksize-1; ++i){
int j = 1;
for(; j < w - 1 - step; j += step){
vload[0] = vld1q_f32(src[i][j-1]);
vload[1] = vld1q_f32(src[i][j]);
vload[2] = vld1q_f32(src[i][j+1]);
float32x4_t tmp = vmulq_f32(vload[1], k[1]);
float32x4_t vbuf = vmlaq_f32(tmp, k[0], vaddq_f32(vload[0], vload[2]));
vst1q_f32(buf[i][j], vbuf);
}
// 标量处理剩下的部分数据
for(; j < w-1 ; ++j ){
buf[i][j] = (src[i][j-1] + src[i][j+1]) * kx[0] + src[i][j] * kx[1];
}
}
稍微总结一下: 拿到一串代码,可以考虑是否可以进行向量化。
- NEON 指令向量化也是有局限的。比如 对于一些查表操作,分支操作不好进行向量化。 对于 NEON 的查表,可以考虑先标量查表,用查表结果初始化一个向量,以便后继操作的向量化。
- 另外,在精度误差允许的前提下,可以把 float 量化成 uin8_t, uint16_t 等,或者使用 float16, 从而获得更高的并行度。(NEON 指令一次处理 128bit, 可以一次性处理 16 个 uint8_t,8 个 uint16_t)
Point 4: 循环展开
这一步是前三步的补充,主要是利用编译器再尝试优化一下。
简单理解循环展开 (unroll loop) 就是增大 for 循环的步长,让每一个迭代可以多处理一些数据,给编译器提供了更多调度的空间(比如指令重排,寄存器重命名,寄存器复用等), 同时也减少了分支判断的次数,从而提升性能。操作很简单,示例代码如下:
// 示例代码 4
constexpr step = 128/sizeof(float); // NEON 指令是固定长度 128bit, 一条 NEON 指令可以并行处理 step 个 float, 这里 step=4
flaot32x4_t vload[3]; // 暂存 load 的结果,用于向量化计算
float32x4_t k[3];
k[0] = vdupq_n_f32(kernel_x[0]); // k[0] = {0.25, 0.25, 0.25}
k[1] = vdupq_n_f32(kernel_x[1]); // k[1] = {0.5, 0.5, 0.5}
int j = 1;
for(int i = 0; i < ksize-1; ++i){
for(; j < w - 1 - step * 2; j += step * 2){
vload[0] = vld1q_f32(src[i][j-1]);
vload[1] = vld1q_f32(src[i][j]);
vload[2] = vld1q_f32(src[i][j+1]);
float32x4_t tmp0 = vmulq_f32(vload[1], k[1]);
float32x4_t vbuf0 = vmlaq_f32(tmp0, k[0], vaddq_f32(vload[0], vload[2]));
vst1q_f32(buf[i][j], vbuf0);
vload[0] = vld1q_f32(src[i][j + step - 1]);
vload[1] = vld1q_f32(src[i][j + step]);
vload[2] = vld1q_f32(src[i][j + step + 1]);
float32x4_t tmp1 = vmulq_f32(vload[1], k[1]);
float32x4_t vbuf1 = vmlaq_f32(tmp1, k[0], vaddq_f32(vload[0], vload[2]));
vst1q_f32(buf[i][j + step], vbuf1);
}
// 处理剩下的部分数据
for(; j < w-1 ; ++j ){
buf[i][j] = (src[i][j-1] + src[i][j+1]) * kx[0] + src[i][j] * kx[1];
}
}稍微总结一下: unroll 次数需要根据实际情况分析测试,也可以尝试不同的 unroll 次数,进行搜索确认。
Point 5:考虑减少重复访存
前面 4 步完成了计算的优化,还需要考虑访存的优化,同样是考虑减少重复的访存。
观察一下示例代码 3,它的三次 vld1q_f32 分别 load 了
- vload[0] : { src0 , src0 , src0 , src0 }
- vload[1] : { src0 , src0 , src0 , src0 }
- vload[2] : { src0 , src0 , src0 , src0 }
三个向量。 下一个 iter 又 load 了 - vload[0] : { src0 , src0 , src0 , src0 }
- vload[1] : { src0 , src0 , src0 , src0 }
- vload[2] : { src0 , src0 , src0 , src0 }
可以发现 src0 这个位置被重复 load 了 3 次。于是考虑引入一组向量 head, body, tail 去减少重复访存。示例代码如下:
// 示例代码 5
constexpr step = 128/sizeof(float); // NEON 指令是固定长度 128bit, 一条 NEON 指令可以并行处理 step 个 float
flaot32x4_t vload[3]; // 暂存 load 的结果,用于向量化计算
float32x4_t k[3];
k[0] = vdupq_n_f32(kernel_x[0]); // k[0] = {0.25, 0.25, 0.25}
k[1] = vdupq_n_f32(kernel_x[1]); // k[1] = {0.5, 0.5, 0.5}
for(int i = 0 ; i < ksize - 1; i++){
float32x4_t head, body, tail; // 每处理一行时,定义一组变量 head, body, tail 去存 load 的结果,通过 vextq 指令去拼凑出和之前三次 vld1q 等效的向量,即上边的 fa[0], vload[1], vload[2]
body = vld1q_f32(src[i][1]);
tail = vld1q_f32(src[i][1]);
int j = 0;
for(; j < w - 1 - step; j += step){
head = body;
body = tail;
tail = vld1q_f32(src[i][j+step]);
vload[0] = vextq_f32(head, body, 3); // vextq_f32 用来拼凑向量,假设 head = {0,1,2,3}, body= {4,5,6,7} , 则 vload[0] = {3,4,5,6}
vload[1] = body; // vload[1] = {4,5,6,7}
vload[2] = vextq_f32(body, tail, 1); // vextq_f32 用来拼凑向量,假设 body = {4,5,6,7}, tail = {8,9,10,11}, 则 vload[2] = {5,6,7,8}
float32x4_t tmp = vmulq_f32(vload[1], k[1]);
float32x4_t vbuf = vmlaq_f32(tmp, k[0], vaddq_f32(vload[0], vload[2]));
vst1q_f32(buf[i][j], vbuf);
}
// 处理剩下的部分数据
for(; j < w - 1; ++j ){
buf[i][j] = (src[i][j-1] + src[i][j+1]) * kx[0] + src[i][j] * kx[1];
}
}通过这种方式,原先每个for(; j < width - 1 - step; j += step)循环里需要 3 次 vld1q,现在只需要 1 次。代价是多了一些赋值和 vextq 的拼凑指令。
简单总结一下: 当算子是 memory-bound 时,可以考虑减少访存次数。比如:设计数据结构去缓存访存结果,减少重复访存。
那么就引出如下的两个问题:
Q1 : 如何知道算子是 bound 在计算上还是访存上?
可以借助 roofline model 进行分析。roofline model 主要是回答“在算力峰值为 A, 带宽峰值为 B 的设备上,跑计算量为 C, 访存量为 D 的程序能达到性能峰值 E 是多少”。具体可以参考引用 3 的论文。
Q2 : 如何知道设备的算力峰值和带宽峰值?
测设备的算力峰值和带宽峰值主要是通过 macro-benchmark。在 github 上可以找到一些 macro-benchmark 的 repo,比如 stream、lmbench 等
Point 6:增加多线程计算
当计算和访存都优化完,保证计算和访存都是必要且最少的,之后考虑引入多线程。
在示例代码 2 中,可以把整个 height 拆成若干段,每一段执行相同的代码,这样就可以开多个线程去并行处理。
Point 7:汇编优化
前 6 步属于 C++/instrinsic 层面的粗调,这一步是汇编层面的优化,属于微调,性能优化应该遵循 “先粗调再细调” 的原则。当在 C++层面想不到其它优化点时,可以考虑进行汇编优化。这里简单介绍一下,不过多展开。主要有以下要点:
- 使用 asm 语法 4,内嵌一段汇编,替换原先的 C++代码,并保证精度正确
- 结合 compiler explorer5 , 读懂每条汇编指令 6 的意思
- 寻找一些多余指令,比如通过寄存器重命名或者指令重排,复用中间结果,从而减少一些指令
- 先去掉所有的访存指令,保留核心计算指令。通过指令重排等手段,让 GFLOPS 尽量达到峰值的 90%以上。
- 通过多发射,用计算尽可能去掩盖访存。
需要注意的是:
- 另外针对不同的平台,会有不同的优化技巧,需要结合体系架构相关的信息去做针对性的优化。
- 用汇编优化也是因为顺序执行核心对指令顺序很敏感,编译器的重排不能保证最优且容易受编译器版本影响。
=
例子 1: 通过查阅 cortex-a55 的优化指南 7,可以得到如下信息:
- cortex-a55 是一个双发射(有两个发射端口,一个 cycle 可以发射两条指令,有两套硬件单元可以同时执行),顺序执行的核心。
- 不同指令的执行 latency , 执行 throughput, 允许发射的端口号等信息。 比如

这里的 LDR 指令 (D-form) 负责从指定地址 load 64bit 的数据到寄存器里
* exec latency 为 3 : 它的执行需要 3 个 cycle
* exec throughput 为 1 : 一个 cycle 只能发射一条 LDR 指令
* Dual-issue 编号为 11 : 可以从 slot0 或者 slot1 发射出去。
知道这些信息,我们可以通过选择可以双发射的指令组合,达到掩盖部分指令的开销的目的。比如
- LDR 指令 (D-form) 可以从 slot0 或 slot1 发射出去,
- LDR 指令(Q-form)只能从 slot 0 发射出去 , FADD 指令 (Q-form) 也只能从 slot 0 发射出去。
于是可以用 LDR(D-form)替换 LDR(Q-form),去和 FADD(Q-form) 做双发射,从而掩盖了 LDR 指令的开销。
Note :
Q-form 指令一次操作 128bit 的数据
D-form 指令一次操作 64bit 的数据
// 示例代码 6
// 原汇编
“fmla v1.4s, v1.4s, v1.s[0]\n”
“ldr q0, [%[b_ptr]]\n”
“fmla v2.4s, v2.4s, v2.s[0]\n”
“fmla v3.4s, v3.4s, v3.s[0]\n”
“fmla v4.4s, v4.4s, v4.s[0]\n”
“fmla v5.4s, v5.4s, v5.s[0]\n”
“fmla v6.4s, v6.4s, v6.s[0]\n”
/*
* ldr q0, [%[b_ptr]] 是 从 ptr 加载 16B 到 v0 寄存器
*/
// 优化后的汇编
“fmla v1.4s, v1.4s, v1.s[0]\n”
“ldr d0, [%[b_ptr]]\n”
“fmla v2.4s, v2.4s, v2.s[0]\n”
“ldr x0, [%[b_ptr], #8]\n”
“fmla v3.4s, v3.4s, v3.s[0]\n”
“fmla v4.4s, v4.4s, v4.s[0]\n”
“fmla v5.4s, v5.4s, v5.s[0]\n”
“ins v0.d[1], x0\n”
“fmla v6.4s, v6.4s, v6.s[0]\n”
/*
* ldr d0, [%[b_ptr]] 是从 b_ptr 加载 8B 到 v0 寄存器的低 8B
* ldr x0, [%[b_ptr], #8] 是从 b_ptr+8 加载 8B 到 x0 寄存器
* ins v0.d[1], x0 是从 x0 寄存器加载 8B 到 v0 寄存器的高 8B
*/例子 2: 查阅 cortex-a55 的优化指南 7,可以知道 fmla,fmul,fadd 指令 (Q-form) 的 latency 都是 4 个 cycle,throughput 都是 1 个 cycle,发射端口都是 0, 于是用 fmla 去替换 fadd+fmul 就可以减少一条指令。
例子 3: cortex-a7 是一个单发射,顺序执行的核心。那么主要是考虑根据指令的 latency,进行指令重排,尽可能排满流水。
其他可能的优化点
完成上述优化步骤后,如果性能还不达标,可以再考虑如下几点优化。
- 调整内存布局
这里至少涉及两个方面。一方面是内存地址的对齐,不同硬件设备都有一些地址对齐的要求,比如 ARM AArch64 Load/Store 指令要求访问的地址和所访问元素的大小(比如 4 字节)对齐,不然可能会触发对齐错误,带来额外的性能损失。 另一方面是内存布局,比如 NHCW,NCHW 等,对于同一段代码,不同的内存布局,访存的连续性是不一样的。也会有自定义的内存布局,在一些情况下可以取得不错的优化效果。
- 良好的 C++代码
C++的写法可以多关注内联,引用,移动语义等,函数接口参数尽可能使用简单的数据结构,可以提升程序性能,减少不必要的开销。
- 把一些函数形参放到模板参数里
这样的做法可以让编译器在编译链接时进行一些简单的运算,提前知道一些参数信息也有助于编译器的优化。比如可以把一些 if 判断的 flag 抽离,做为模板参数。
优化思路总结
上述通过 GaussianBlur 的例子,介绍了一些可能的优化点,但这只是整个优化流程的一个步骤。
性能优化是一个不断迭代的过程,很难追求一步到位。一般的优化流程可以用下图表示:
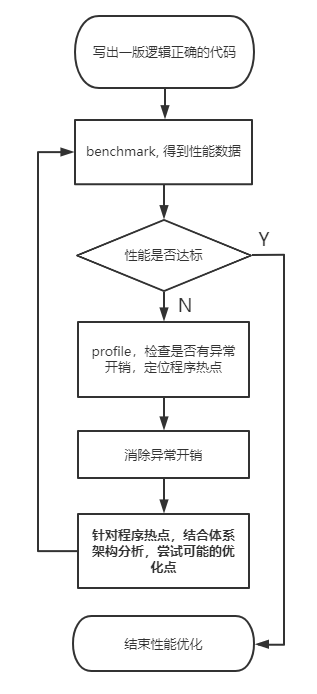
benchmark
为了得到一个正确的优化反馈,需要做科学严谨地 benchmark。笔者认为 benchmark 至少需要考虑以下因素:
- 跑多次取平均值
- 跑多次之前,需要先额外跑几次,做 warm up。 目的是将数据加载到 cache 中,使得后续测速速度相对稳定
做速度对比时,需要保证两边的各种可能影响速度的要素尽可能对齐,包括:
- 输入地址是否都做了地址对齐
- 关键的编译选项是否对齐
- 依赖的第三方库版本是否对齐
- 编译工具链是否对齐
- 算子的各种参数组合对齐等等
- 观察每个 iter 的速度数据,如果波动较大,则应该舍去,重新测速
- 设置 cpu 亲和度,进行绑核
也可以考虑使用 google_benchmark 等 benchmark 工具。
profile
做性能优化之前,往往需要先做一下 profile,了解程序的热点(耗时最多的地方),观察有没有异常的开销(比如函数封装的 overhead 过大)。
可以使用一些 profiling 工具,硬件厂商通常会提供自己的 profiling 工具,比如 x86 上用 intel 的 vtune,nvidia 用上 nsight compute,arm 上用 arm map, android 上用 simple_perf 等。
也可以手动加计时函数,比较核心代码的速度和封装后的速度,确定封装带来的 overhead 是否合理。
附
GitHub:MegEngine 旷视天元 (欢迎 star~
Gitee:MegEngine/MegEngine
欢迎加入 MegEngine 技术交流 QQ 群:1029741705
- 高斯模糊 https://zh.wikipedia.org/wiki... ↩
- Stack Blur https://medium.com/mobile-app... ↩
- roofline model https://people.eecs.berkeley.... ↩
- C++内嵌汇编 https://dmalcolm.fedorapeople... ↩
- compiler explorer https://godbolt.org/ ↩
- arm 汇编指令详细介绍 https://developer.arm.com/doc... ↩
- Arm Cortex-A55 Software Optimization Guide https://developer.arm.com/doc... ↩