ROS入门(一)——ROS安装(vmware16+ubuntu20.04+ROS-Noetic)
嵌套:ROS可以在Ubuntu上运行,Ubuntu在虚拟机Vmware中安装。
从 虚拟机vmware安装→ubuntu安装→ros安装,逐步介绍安装ROS环境的过程。整个过程是我一步步跟着各种博客安装实现的,亲测可行。
版本:
- Vmware :Vmware Workstation16
- Ubuntu :20.04
- ROS :Noetic
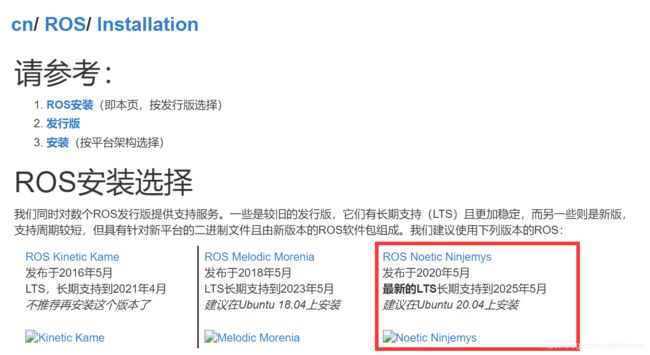
其中vmware直接载当前最新版本就好,而ubuntu的版本要注意一下。
在ROS官网(cn - ROS Wiki),我们进入到ROS安装的步骤界面,可以看到最新版本的ROS-Neotic在Ubuntu20.04上运行,因此ubuntu我们安装20.04版本,ROS版本为Noetic。
一、Vmware Workstation16安装
1.许可证
如果没有账号,安装Vmware将用到许可证,我在以下链接中测试得到可用的许可证:
求vmware workstation 16激活密钥_百度知道
2.Vmware安装
安装过程参考链接:
最新超详细VMware虚拟机下载与安装_隐秀_-CSDN博客_vmware虚拟机安装
二、Ubuntu20.04安装
1.Ubuntu镜像下载
可以从网易的镜像网站下载:
Index of /ubuntu-releases/20.04/

当然也可以找别的镜像。
2. Ubuntu安装
完成虚拟机安装后,打开一个新的虚拟机,安装Ubuntu20.04过程如下链接:
ubuntu20.04安装教程,ubuntu详细安装教程20.04 - ubuntu安装配置教程 - 博客园
★在链接的步骤2.15中,ISO映像文件选择第一步下载好的iso文件。
三、ROS安装
1.安装
安装好Ubuntu之后,按照以下视频链接安装ROS:
在Ubuntu20.04上安装ROS机器人操作系统-Noetic_哔哩哔哩_bilibili
2.电脑相关信息查看
在安装过程中会涉及到一些设置,可以查看自己的电脑配置
win10查看处理器和处理器内核
3.错误小结
在这个过程中,除了视频链接里面遇到的问题,还可能会遇到几个错误:
(1)仓库没有数字签名
在安装到步骤1.4时,遇到报错
sudo apt update# 报错
E: 仓库 “http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal Release” 没有数字签名。
N: 无法安全地用该源进行更新,所以默认禁用该源。解决方案见ROS入门——解决:E: 仓库 “http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal Release” 没有数字签名。
(2)缺少release
安装到步骤1.4时,遇到报错缺少release
E: 仓库 “http://mirrors.ustc.edu.cn/ros/ubuntu focal Release” 没有 Release 文件参见他人博客E: 仓库 “http://mirrors.ustc.edu.cn/ros/ubuntu focal Release” 没有 Release 文件。_KongFann的博客-CSDN博客
(3)Resource not found
启动roscore时,出现Resource not found: roslaunch,发现问题所在了,内容也适用于所有Resource not found:xxx
解决方案见ROS入门——解决:Resource not found:xxx
四、测试运行
安装完ROS之后,可以使用几个命令来测试ROS是否成功安装
- roscore :ros核心,在使用ros各种功能时必须先启动
- rosrun turtlesim turtlesim_node :小乌龟界面,运行后可以看到弹出一个窗口,窗口中有一只小乌龟【每次重新打开窗口,小乌龟长得会不一样】
- rosrun turtlesim turtle_teleop_key:小乌龟控制,运行后可以使用上下左右的键盘按键来控制小乌龟移动【注意要使当前窗口为运行该代码的窗口】
- gazebo:一个仿真环境下的机器人控制软件,可以导入或自己建造仿真环境
- rviz:一个机器人信息采集和展示软件,可以将gazebo中机器人对环境的感知信息在rviz中显示,如雷达、摄像头
# 终端1 启动ros核心
roscore
# 终端2 小乌龟界面
rosrun turtlesim turtlesim_node
# 终端3 小乌龟控制
rosrun turtlesim turtle_teleop_key
# 终端4 软件
gazebo
rvizgazebo和rviz的具体实验过程可参考链接
ROS入门(五)——仿真机器人一(URDF+Rviz)
ROS入门(六)——仿真机器人二(Xacro+Rviz+Arbotix小车运动)
ROS入门(七)——仿真机器人三(Gazebo+Xacro)
ROS入门(八)——仿真机器人四(Gazebo+Rviz+雷达、摄像头、kinet仿真显示)