非线性可视化(4)庞加莱截面

上一期介绍了几个经典的非线性系统,并给出了他们在三维相空间的各种表现。
但是随着维度增加到三维甚至更高维,光绘制出相空间已经不足以直观的了解系统的形态。我们也很难对着一坨烂七八糟的轨线在论文里水字数。因此有必要引入一个新的可视化方法,对系统进一步降维,提炼出更简洁的信息。
庞加莱截面就是基于这个思想被提出来的。对于一个周期运动的系统,在相空间的运动表现为一圈又一圈的转动。我们定义一个截面(一般是平面),当轨线穿过这个面时,把交点记录下来。当记录足够多的交点后,这些交点形成的图像就是庞加莱截面的图像。而这个截面就是庞加莱截面。
一般只记录由向正向负穿越截面的交点,不记录由负向正穿越的点。这样,就可以得到下面的规律:对于单周期运动,轨线为一个近似圆形,庞加莱截面上为一个点;对于2周期运动,轨线绕两圈才会闭合,穿过庞加莱截面两次,表现为2个点;对于周期N的运动,庞加莱截面上有N个点。
对于混沌运动,截面上的点理论上会有无限多。如果截面上的点形成了一条线,则把这种运动叫做拟周期运动。如果庞加莱截面上的点形成了一片二维图形,甚至还存在分形结构,则可以判断是典型的混沌运动。
单纯的说可能不太直观,这里用之前的duffing方程举个例子。
将Duffing方程改写为下面的三维形式:

然后和前面一样,用龙格库塔方法求解即可。
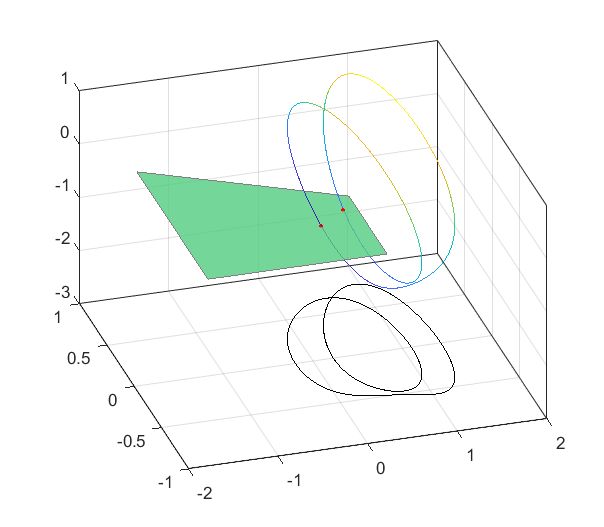
取[δ,γ,ω]=[1.5,1,1],其三维的相空间和对应的庞佳莱截面如下:

三维的轨线图为近似一个圆。绿色的面就是定义的庞加莱截面(当然实际上应该是一个无限大的平面,这里为了展示只画了一部分)。这时对应的运动为典型的周期运动,庞加莱截面上只有一个交点。
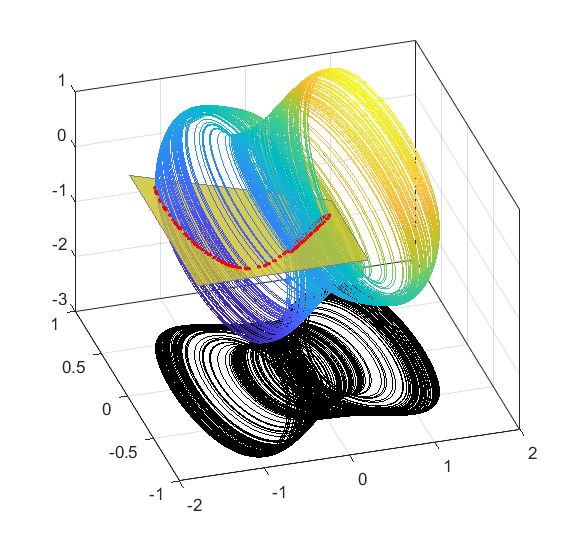
当取[δ,γ,ω]=[1.35,1,1]时,其三维的相空间和对应的庞佳莱截面如下:
此时的运动变为周期2的运动,对应的二维相平面上的投影(下面黑色的),为一个交叉的双环。这种周期2的运动与庞加莱截面有2个交点。
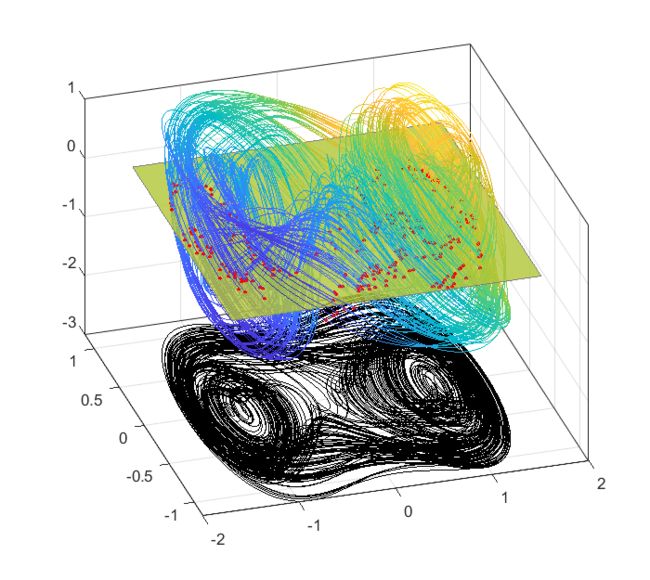
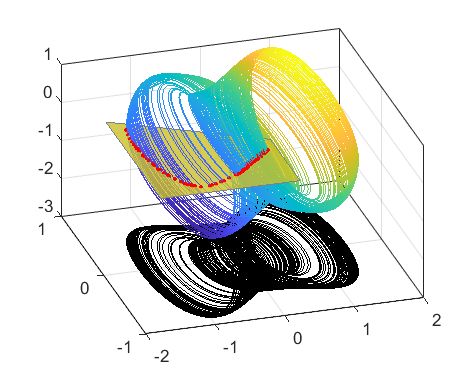
当取[δ,γ,ω]=[1.15,1,1]时,其三维的相空间和对应的庞佳莱截面如下:
此时运动变为混沌运动,对应的二维相平面投影为一个混沌的8字型堆叠的图案。而庞加莱截面上的点则似乎很有规律的分布着。
单独将截面上的点绘制出来,可以得到:

庞加莱截面上的点以线的方式分布着,可以认为这种运动为一种准周期运动。
如果取[δ,γ,ω]=[0.1,0.35,1.4]时,系统会进入混沌状态,其庞加莱截面演示图如下:
其庞加莱截面图像如下。对于复杂的庞加莱截面,如果想要绘制的好看,需要计算非常多的点,这也意味着非常大的计算时间。

此时,庞加莱截面还有很多分形结构,其局部放大图如下
计算庞加莱截面的方法可以分为两步:1计算出轨线 2计算出线与面的交点。
额外插一句,Duffing方程如果翻到开头,去看它的形式,可以看到它是一个非自治系统,有一个周期性外力在方程里。这里绘制庞加莱截面的处理方式,是把周期性力单独提出来,定义为z,然后绘制z=0的图像。这时每个截面上的点对应时间t,是一个以周期(2π/ω)为等差的数列。
还有一种降维方法,叫做频闪采样法,就是针对这类型含有周期驱动力的方程的。在计算完轨线之后,直接取t0,t0+T,t0+2T,t0+3T,...这样的时间序列,其中T为驱动周期,这些点天然的在一个庞加莱平面上。因此,这样可以大大的简化庞加莱图像的计算,缩短计算时间。方程本身甚至也可以降维到2维,如下面所示。虽然下面的方程已经看不到高维空间截面的样子,但是频闪采用法本质上还是庞加莱截面。
下面程序是通用的计算庞加莱截面的matlab程序:
%庞佳莱截面
%截面采用公式Ax+By+Cz+D=0;的形式
%采用杜芬方程演示
clear
clc
close all
%第一步,计算出轨迹
h=5e-3;
x0=0:h:1600;
y0=[0.1;0.1;1];%最后一项是cos(w*t),当t=0时必须为1.
[y1,Output]=ODE_RK4_hyh(x0,h,y0,[1.15,1,1]);
%[1.5,1,1],[1.35,1,1],[1.15,1,1],[0.1,0.35,1.4]
Lx=y1(1,2000:end);
Ly=y1(2,2000:end);
Lz=y1(3,2000:end);
Plane=[0;0;1;0];%一般情况下是个垂直某个轴的平面。这里是z=0
[tP_List,yP_List]=Solve_Poincare(x0,y1,Plane);%计算Poincare平面上的点
%绘图
%1庞加莱截面
%最开始几个点还没有稳定,没有体现出系统特点,所以放弃,从第10个点开始
figure()
plot(yP_List(1,10:end),yP_List(2,10:end),'.')
xlim([-1,0.6])
ylim([-0.8,0.2])
%2投影的二维相平面
figure()
plot(Lx,Ly)
%3展示用的示意图
figure()
hold on
patch([Lx,nan],[Ly,nan],[Lz,nan],[Lx+Ly,nan],...
'EdgeColor','interp','Marker','none','MarkerFaceColor','flat','LineWidth',0.8,'FaceAlpha',1);
plot3(yP_List(1,10:end),yP_List(2,10:end),zeros(size(yP_List(2,10:end))),...
'.','MarkerSize',8,'color','r')
patch([-1.6,0.4,0.4,-1.6],[-0.7,-0.7,0.0,0.6],[0,0,0,0],[1,1,1,1],...
'FaceAlpha',0.8,'EdgeColor',[0.5,0.5,0.5])
view([-17,39])
box on
grid on
%绘制相图
set(gcf,'position',[300 200 560 500])
xlim([-2,2])
zlim([-3,1])
plot3( Lx,Ly,zeros(size(Ly))-3 ,'color','k')
hold off
function [tP_List,yP_List]=Solve_Poincare(t,y,Plane)
%截面方程z=0
% Plane=[0;0;1;0];%一般情况下是个垂直某个轴的平面
%一般只记录从负到正穿越。如果想反向也记录,可以设置Plane=-Plane。
%第一步,计算出轨线y
%第二步,插值得到线与面的交点
yP_List=[];
tP_List=[];
Dis=DistancePlane(y,Plane);
N=size(y,2);
for k=1:N-1
if Dis(k)<=0 && Dis(k+1)>0
t0=t(k);t1=t(k+1);
yP0=y(:,k);yP1=y(:,k+1);
Dis0=Dis(k);Dis1=Dis(k+1);
%一维线性插值,求Dis=0时的t和y
%(相比较前面积分的4阶RK,这里用线性插值精度有点低)
yP=yP0+(yP1-yP0)/(Dis1-Dis0)*(0-Dis0);
tP=t0+(t1-t0)/(Dis1-Dis0)*(0-Dis0);
%储存
yP_List=[yP_List,yP];
tP_List=[tP_List,tP];
end
end
end
%点到平面的距离
function Dis=DistancePlane(xk,Plane)
% xk,坐标点,如果是3维坐标,大小就是3*N的矩阵。
% Plane,平面,形如Ax+By+Cz+D=0形式的平面。
N=size(xk,2);%计算总共多少个点
xk2=[xk;ones(1,N)];
Dis=dot(xk2,Plane*ones(1,N),1)./norm(Plane(1:end-1));
end
%两点线性插值
function y=interp2point_linear(x0,x1,y0,y1,x)
y=y0+(y1-y0)/(x1-x0)*(x-x0);
end
%两点3次插值
function y=interp2point_spline(x0,x1,y0,y1,x)
%y0包含y0的值和y0的导数,yy=y0(1),dy=y0(2)
xx0=x0;
xx1=x1;
yy0=y0(1);dy0=y0(2);
yy1=y1(1);dy1=y1(2);
cs = csape([xx0,xx1],[dy0,yy0,yy1,dy1],[1,1]);
y=ppval(cs,x);
end
function [F,Output]=Fdydx(x,y,Input)
%形式为Y'=F(x,Y)的方程,参见数值分析求解常系数微分方程相关知识
%高次用列向量表示,F=[dy(1);dy(2)];y(1)为函数,y(2)为函数导数
%杜芬方程duffing,参见中国大学MOOC,北京师范大学-计算物理基础-77倒摆与杜芬方程
d=Input(1);
r=Input(2);
w=Input(3);
dy(1)=y(2);
dy(2)=-y(1)^3+y(1)-d*y(2)+r*y(3);
dy(3)=-w*sin(w*x);
F=[dy(1);dy(2);dy(3)];
Output=[];
end
function [y,Output]=ODE_RK4_hyh(x,h,y0,Input)
%4阶RK方法
%h间隔为常数的算法
y=zeros(size(y0,1),size(x,2));
y(:,1)=y0;
for ii=1:length(x)-1
yn=y(:,ii);
xn=x(ii);
[K1,~]=Fdydx(xn ,yn ,Input);
[K2,~]=Fdydx(xn+h/2,yn+h/2*K1,Input);
[K3,~]=Fdydx(xn+h/2,yn+h/2*K2,Input);
[K4,~]=Fdydx(xn+h ,yn+h*K3 ,Input);
y(:,ii+1)=yn+h/6*(K1+2*K2+2*K3+K4);
end
Output=[];
end下面是相同效果下,采用频闪采样法。Duffing方程也被降维为2维(其实也可以不变)
%庞佳莱截面
%截面采用频闪采样法
%采用杜芬方程
clear
clc
close all
%第一步,计算出轨迹
h=5e-3;
x0=0:h:1600;
y0=[0.1;0.1];%最后一项是cos(w*t),当t=0时必须为1.
[y1,Output]=ODE_RK4_hyh(x0,h,y0,[1.15,1,1]);
Lx=y1(1,:);
Ly=y1(2,:);
Lz=cos(1*x0);
%不用计算截面的方式
% Plane=[0;0;1;0];%一般情况下是个垂直某个轴的平面
% [tP_List,yP_List]=Solve_Poincare(x0,y1,Plane);%计算Poincare平面
%采用频闪采样法计算
tP_Ideal=3*pi/2:(2*pi/1):x0(end);
tP_List=zeros(1,length(tP_Ideal));
Ind_List=zeros(1,length(tP_Ideal));
for k=1:length(tP_Ideal)
[~,Ind]=min(abs( tP_Ideal(k)-x0 ));
Ind_List(k)=Ind;
tP_List(k)=x0(Ind);
end
yP_List=y1(:,Ind_List);
%绘图
%3展示用的示意图
figure()
hold on
% plot3(y1(1,:),y1(2,:),y1(3,:))
patch([Lx,nan],[Ly,nan],[Lz,nan],[Lx+Ly,nan],...
'EdgeColor','interp','Marker','none','MarkerFaceColor','flat','LineWidth',0.8,'FaceAlpha',1);
plot3(yP_List(1,10:end),yP_List(2,10:end),zeros(size(yP_List(2,10:end))),...
'.','MarkerSize',8,'color','r')
patch([-1.6,0.4,0.4,-1.6],[-0.7,-0.7,0.0,0.6],[0,0,0,0],[1,1,1,1],...
'FaceAlpha',0.8,'EdgeColor',[0.5,0.5,0.5])
view([-17,39])
box on
grid on
%绘制相图
set(gcf,'position',[300 200 560 500])
xlim([-2,2])
zlim([-3,1])
plot3( Lx,Ly,zeros(size(Ly))-3 ,'color','k')
hold off
function [F,Output]=Fdydx(x,y,Input)
%形式为Y'=F(x,Y)的方程,参见数值分析求解常系数微分方程相关知识
%高次用列向量表示,F=[dy(1);dy(2)];y(1)为函数,y(2)为函数导数
d=Input(1);
r=Input(2);
w=Input(3);
%降维后的Duffing方程
dy(1)=y(2);
dy(2)=-y(1)^3+y(1)-d*y(2)+r*cos(w*x);
% dy(3)=-w*sin(w*x);
F=[dy(1);dy(2)];
Output=[];
end
function [y,Output]=ODE_RK4_hyh(x,h,y0,Input)
%4阶RK方法
%h间隔为常数的算法
y=zeros(size(y0,1),size(x,2));
y(:,1)=y0;
for ii=1:length(x)-1
yn=y(:,ii);
xn=x(ii);
[K1,~]=Fdydx(xn ,yn ,Input);
[K2,~]=Fdydx(xn+h/2,yn+h/2*K1,Input);
[K3,~]=Fdydx(xn+h/2,yn+h/2*K2,Input);
[K4,~]=Fdydx(xn+h ,yn+h*K3 ,Input);
y(:,ii+1)=yn+h/6*(K1+2*K2+2*K3+K4);
end
Output=[];
end效果图如下,可以看到两种方法是一致的。
频闪采样法适合周期驱动的非自治方程。而一般形式的庞加莱截面求交点法,试用范围会更广一些。
题外话

恭喜昨晚观看直播中奖的四位伙伴,正版纸质图送《MATLAB智能优化算法:从写代码到算法思想》正在赶来的路上
书籍简介:《MATLAB智能优化算法:从写代码到算法思想》以实战和快速教会智能优化算法初学者为主旨,通过9个常见的组合优化问题、5个经典的智能优化算法及4个新颖的智能优化算法,让读者全面、深入、透彻地理解智能优化算法求解问题时的算法设计思路及代码编写思路,进一步提高使用智能优化算法求解实际问题的实战能力。
当然,没有中奖但有需要的小伙伴可以通过下方链接进行购买或通过matlab爱好者视频号的商品列表中购买。

凡通过matlab爱好者视频号商品成功购买的伙伴,将获得3元现金红包返利!
领取方式:直接将相关签收订单截图和微信收款码发到matlab爱好者公众号后台即可领取现金返利!
参考资料:
[1]刘秉正,非线性动力学与混沌基础[M]
[2]Computing accurate Poincaré maps[J]. PHYSICA D, 2002, 171(3):127-137.
