【深度学习】:《100天一起学习PyTorch》第八天:权重衰退(含源码)
【深度学习】:《100天一起学习PyTorch》第八天:权重衰退(含源码)
- ✨本文收录于【深度学习】:《100天一起学习PyTorch》专栏,此专栏主要记录如何使用
PyTorch实现深度学习笔记,尽量坚持每周持续更新,欢迎大家订阅! - 个人主页:JoJo的数据分析历险记
- 个人介绍:小编大四统计在读,目前保研到统计学top3高校继续攻读统计研究生
- 如果文章对你有帮助,欢迎✌
关注、点赞、✌收藏、订阅专栏
参考资料:本专栏主要以沐神《动手学深度学习》为学习资料,记录自己的学习笔记,能力有限,如有错误,欢迎大家指正。同时沐神上传了的教学视频和教材,大家可以前往学习。
- 视频:动手学深度学习
- 教材:动手学深度学习

文章目录
- 【深度学习】:《100天一起学习PyTorch》第八天:权重衰退(含源码)
- 1.基本概念
- 2.代码实现
-
- 2.1 生成数据集
- 2.2 初始化参数
- 2.3 定义惩罚项
- 2.3 训练
- 3.拓展部分
1.基本概念
前一节我们描述了过拟合的问题,虽然我们可以通过增加更多的数据来减少过拟合,但是成本较高,有时候并不能满足。因此现在我们来介绍一些正则化模型的方法。在深度学习中,权重衰退是使用较为广泛的一种正则化方法。具体原理如下。
我们引入L2正则化,此时我们的损失函数为:
1 2 m ∑ i = 1 n ( W T X ( i ) + b − y ( i ) ) 2 + λ 2 ∣ ∣ W ∣ ∣ 2 \frac{1}{2m}\sum_{i=1}^{n}(W^TX^{(i)}+b-y^{(i)})^2+\frac{\lambda}{2}||W||^2 2m1i=1∑n(WTX(i)+b−y(i))2+2λ∣∣W∣∣2
其中, λ 2 ∣ ∣ W ∣ ∣ 2 \frac{\lambda}{2}||W||^2 2λ∣∣W∣∣2称为惩罚项
对新的随时函数求梯度得到:
d L d w + λ W \frac{dL}{dw}+\lambda W dwdL+λW
和我们之前更新参数一样,L2正则化回归的梯度下降更新如下:
w : = ( 1 − η λ ) w − η d L d w w := (1-\eta\lambda)w-\eta \frac{dL}{dw} w:=(1−ηλ)w−ηdwdL
通常 η λ < 1 \eta\lambda<1 ηλ<1,因此在深度学习中我们称为权重衰退。
注意事项:
- 1.我们只对权重W进行惩罚,而不对b进行惩罚
- 2. λ \lambda λ是一个超参数,值越大,则对权重的衰退越大,当趋近无穷时,权重趋近0,相反如果值为0,则没有约束。
- 3.L2正则化不能实现稀疏的结果,如果想要减少特征,使用L1正则化进行特征选择。
下面通过具体代码来看看具体是如何实现的
2.代码实现
和上一章一样,照样使用模拟数据集,生成数据集如下:
y = 0.1 + ∑ i = 1 d 0.01 x i + ϵ where ϵ ∼ N ( 0 , 0.0 1 2 ) y = 0.1 + \sum_{i = 1}^d 0.01 x_i + \epsilon \text{ where } \epsilon \sim \mathcal{N}(0, 0.01^2) y=0.1+i=1∑d0.01xi+ϵ where ϵ∼N(0,0.012)
2.1 生成数据集
这里假设真实的数据如下:
y = 0.1 + ∑ i = 1 200 0.01 x i + ϵ y = 0.1 + \sum_{i = 1}^{200} 0.01 x_i + \epsilon y=0.1+i=1∑2000.01xi+ϵ
下面我们先生成数据集
"""导入相关库"""
import torch
from d2l import torch as d2l
from torch import nn
%matplotlib inline
# 定义相关函数。这是沐神教材中的函数,如果下载了d2l可以直接导入
def synthetic_data(w, b, num_examples): #@save
"""生成y=Xw+b+噪声"""
X = torch.normal(0, 1, (num_examples, len(w)))
y = torch.matmul(X, w) + b
y += torch.normal(0, 0.01, y.shape)
return X, y.reshape((-1, 1))
def load_array(data_arrays, batch_size, is_train=True):
"""构造一个PyTorch数据迭代器"""
dataset = data.TensorDataset(*data_arrays)#将数据转换为tensor
return data.DataLoader(dataset, batch_size, shuffle=is_train)
"""生成数据集"""
n_train, n_test, num_inputs, batch_size = 50, 100, 200, 5#定义相关训练集,验证集,输入变量,以及batch的大小
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.1#定义真实的参数
train_data = d2l.synthetic_data(true_w, true_b, n_train)#生成模拟数据,具体函数如下
train_iter = d2l.load_array(train_data, batch_size)#加载训练集数据
test_data = d2l.synthetic_data(true_w, true_b, n_test)
test_iter = d2l.load_array(test_data, batch_size, is_train=False)
根据上一章的介绍,我们知道样本越小越容易造成过拟合,这里我们将样本量设置为100,但是参数却有200个,这种情况下p>n,很容易造成过拟合现象。
2.2 初始化参数
生成数据集后,下一步就是初始化参数,这里我们对于权重 w w w初始化为标准正态分布,偏差 b b b初始化为0
def init_params():
w = torch.normal(0, 1, size=(num_inputs, 1), requires_grad=True)#生成标准正态分布
b = torch.zeros(1, requires_grad=True)#生成全部为0的数据
return [w, b]
2.3 定义惩罚项
这里我们定义L2正则化,具体代码如下所示
def l2_penalty(w):
return torch.sum(w.pow(2)) / 2
2.3 训练
这里和之前线性回归训练基本一致,唯一不同的是多了一个惩罚项,因此lambd为超参数
def train(lambd):
w, b = init_params()#初始化参数
net, loss = lambda X: d2l.linreg(X, w, b), d2l.squared_loss#这里使用匿名函数,定义了两个函数,一个是求解模型结果,一个是损失函数
num_epochs, lr = 100, 0.003
"""定义相关图形设置"""
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])
"""模型训练,更新参数"""
for epoch in range(num_epochs):
for X, y in train_iter:
# 增加了L2范数惩罚项,
# 广播机制使l2_penalty(w)成为一个长度为batch_size的向量
l = loss(net(X), y) + lambd * l2_penalty(w)
l.sum().backward()
d2l.sgd([w, b], lr, batch_size)
"""绘制训练误差和测试误差"""
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1, (d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print('w的L2范数是:', torch.norm(w).item())
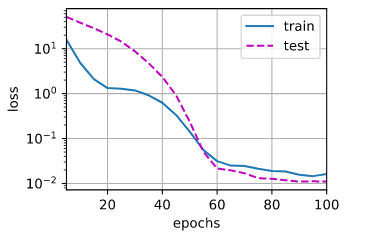
首先,我们来看看不增加惩罚项的情况,即和我们之前的线性回归一致,此时,存在严重的过拟合现象,如下图所示
train(lambd=0)
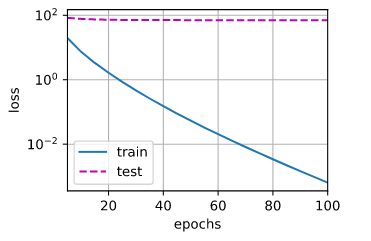
从上图结果来看,存在严重的过拟合问题,验证误差远远比训练误差大。下面我们来看看lambd为5的情况下的结果
train(lambd=5)
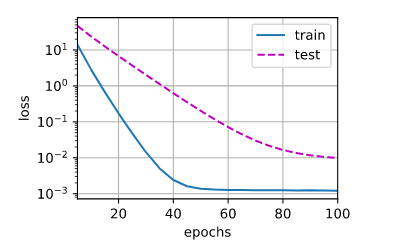
可以看出,随着lambd的增加,验证误差不断减少,但是还是存在过拟合。
def train_concise(wd):
net = nn.Sequential(nn.Linear(num_inputs, 1))#定义线性神经网络
for param in net.parameters():
param.data.normal_()#初始化参数
loss = nn.MSELoss(reduction='none')#定义MSE损失函数
num_epochs, lr = 100, 0.003#定义训练次数和学习率
# 偏置参数没有衰减
trainer = torch.optim.SGD([
{"params":net[0].weight,'weight_decay': wd},
{"params":net[0].bias}], lr=lr)#定义权重衰退,其中超参数为wd
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])#绘图
"""训练模型"""
for epoch in range(num_epochs):
for X, y in train_iter:
trainer.zero_grad()
l = loss(net(X), y)
l.mean().backward()
trainer.step()
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1,
(d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print('w的L2范数:', net[0].weight.norm().item())
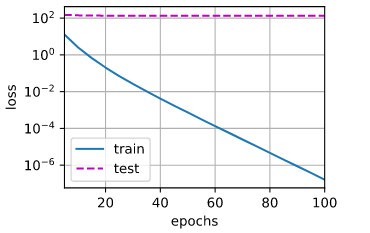
train_concise(0)
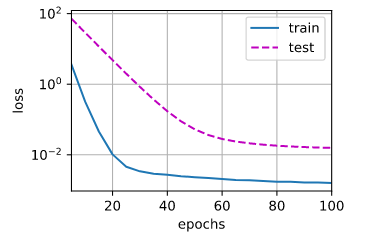
train_concise(3)
3.拓展部分
沐神的参考教材中使用的是L2正则化,我们接下来看看使用L1正则化的效果,首先需要定义一下L1正则化,如下所示:
1 2 m ∑ i = 1 n ( W T X ( i ) + b − y ( i ) ) 2 + λ ∣ W ∣ \frac{1}{2m}\sum_{i=1}^{n}(W^TX^{(i)}+b-y^{(i)})^2+{\lambda}|W| 2m1i=1∑n(WTX(i)+b−y(i))2+λ∣W∣
def l1_penalty(w):
return torch.sum(torch.abs(w))
def train_l1(lambd):
w, b = init_params()#初始化参数
net, loss = lambda X: d2l.linreg(X, w, b), d2l.squared_loss#这里使用匿名函数,定义了两个函数,一个是求解模型结果,一个是损失函数
num_epochs, lr = 100, 0.003
"""定义相关图形设置"""
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])
"""模型训练,更新参数"""
for epoch in range(num_epochs):
for X, y in train_iter:
# 增加了L1范数惩罚项,
# 广播机制使l1_penalty(w)成为一个长度为batch_size的向量
l = loss(net(X), y) + lambd * l1_penalty(w)
l.sum().backward()
d2l.sgd([w, b], lr, batch_size)
"""绘制训练误差和测试误差"""
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1, (d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print('w的L2范数是:', torch.norm(w).item())
train_l1(1)
| 可以看出使用L1正则化,当lambd为1的时候,就可以使得验证误差基本等于训练误差。其实正如我们之前说的,L2正则化只能将参数压缩,但是不能去除为0,我们这个模拟数据集中,p为200,n为100,p>>n,此时使用L1正则化可以使得某些特征的系数为0,从而更好的缓解过拟合问题。 |
本章的介绍到此介绍,如果文章对你有帮助,请多多点赞、收藏、评论、关注支持!!