深度学习——神经网络之CNN卷积神经网络
深度学习——神经网络之CNN卷积神经网络
深度学习——神经网络之CNN卷积神经网络
-
- 深度学习——神经网络之CNN卷积神经网络
- 1、回顾神经网络知识
-
- 1.1、BP神经网络回顾
- 1.2、激活函数
- 2、卷积神经网络
-
- 2.1、卷积的过程
- 2、卷积的参数
-
- 2.1、Padding填充
- 2.2、Stride步长
- 3、卷积核通道数的计算
- 4、池化层
-
- 4.1、max-pooling
- 4.2、mean-pooling
- 5、dropout和dropconnect、DropBlock、Disout提升模型精准率
- 6、不同激活函数大PK
-
- 6.1、sigmoid函数
- 6.2、tanh函数
- 6.3、relu函数
- 6.4、Relu6函数
- 6.5、Leaky ReLU & PReLU
- 6.6、ELU函数
- 6.7、SELU函数
- 6.8、Swish函数
- 7、卷积后的全连接层
- 8、深度学习的归一化层
-
- 8.1、Batch Normalization(BN)批归一化
- 8.2、Group Normalization(GN)组归一化
- 8.3、Layer Normalization(LN)层归一化
- 8.4、Instance Normalization(IN)归一化
- 9、参数初始化操作
-
- 9.1、random initialization 随机初始化
- 9.2、Xavier初始化
- 9.3、其他初始化方法
- 10、学习率
- 11、数据增强必不可少
- 12、优化器
-
- 12.1、SGD+动量
- 12.1、Adam+动量
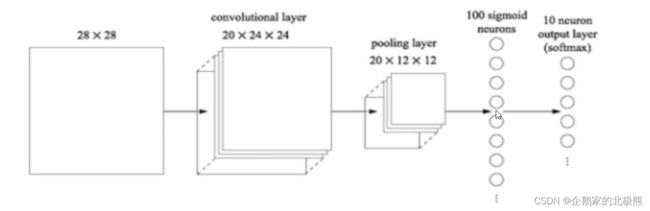
本篇文章开始介绍卷积神经网络,卷积神经网络分为很多种,在后面的《高阶段卷积》章节介绍,这个、里主要介绍卷积神经网络用到的基础知识。所有负责的模型都是根据简单的模型优化而来的。
1、回顾神经网络知识
1.1、BP神经网络回顾
第一个问题:为什么有了BP神经网(DNN网络中有介绍)络还要有深度学习?
- BP神经网络不适合深层的模型,太深以后BP反向传播过程中容易造成梯度消失或者梯度暴涨,只适合浅层的
- 算力问题,没有GPU,CUP算力不够,随着深度的加深,参数的增多,模型训练困难,时间长。
第二个问题:影响模型复杂程度的因素
- 隐含层的层数
- 单个隐含层的神经元个数
这两个因素都是影响模型参数的条件,后期优化模型的思路大多也是从这两个方面做得优化,层而产生新的模型。
1.2、激活函数
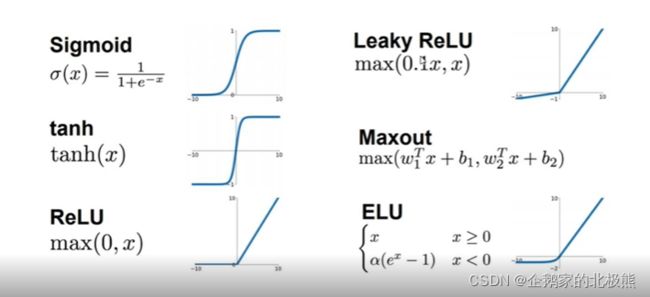
- Sigmoid函数的缺点,从图中可以看出,Sigmoid激活函数具有饱和区域,随着值的增加,到一定程度时,函数的值趋向于1,0,这样就会造成梯度消失(为0),模型收敛不了。
- tanh同Sigmoid一样,也具有饱和区。
- Relu:更多用于图像模型,后面的好多激活函数都是在这个激活函数上优化的,优化的就是他的缺点——>当值为负数(权重为负数)的时候,直接置为0了
- Leaky ReLU:在Relu上做的改进,当值为负数的时候,加上一个0.1的斜率(乘0.1)
- Maxout,ELU也是分段函数,对Relu做一个改进
2、卷积神经网络
第一个问题:为什么有了DNN神经网络,RNN神经网络,BP神经网络,还要CNN神经网络?
- 对于图像得处理,如果用DNN,RNN,BP神经网络,不能捕捉图像得局部信息。
- 图像得维度很大,输入就很大(要将图片拉平),这样如果做全连接的话,参数就会很多,下面我们看一个例子:
-
图像维度5x5
第一层隐含层神经元个数 9
输入:25
输出 :9
参数:25 x 9
第二个问题:卷积的作用目的
- 卷积的目的还是作为特征的提取,做了卷积以后,如果做分类的任务,同样要加上全连接层,在进行激活,或者softmax做分类。
2.1、卷积的过程
卷积神经网络通DNN神经网络一样,也分为,输入层,输出层,和卷积层三部分。
不同的是,这里的卷积层用的是卷积核来做卷积,不再是神经元。如下图:
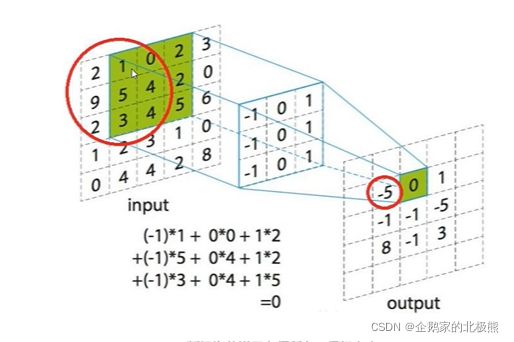
在这里,你可以把卷积核看成是一个窗口,拿着这个“窗口”去扫描图片,扫描到的区域称之为感受野,这样的操作,就保证了模型可以考虑的图像得局部特征。
卷积的输出结果:
卷积核的每一个值,与对应感受野的值相乘,之后左右的结果相加。有偏置项的加上偏置项,在做一个激活函数进行激活,作为输出结果(上图中的例子没有做激活)
那么此时,一个卷积核的大小,就是对应参数的个数。
同样是上边的例子,我们看一下利用卷积来做的参数
图像维度 5x5
输出为3x3 = 9
卷积核大小 :3x3
参数的个数 = 9
很明显,在兼顾了局部特征的前提下,参数个数大大降低。
2、卷积的参数
2.1、Padding填充
在Tensorflow中padding有两种属性:
- valid,表示不需要padding操作
- 假设输入大小为n*n,卷积核大小为f *f,此时输出大小为(n-f+1);
- same,表示输入和输出的大小相同
- 假设padding的大小为p,此时为了保持输出和输入消息相同p =(f-1)/2,但是此时卷积核要是奇数大小。

2.2、Stride步长
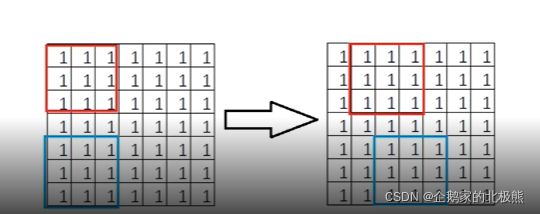
stride是指卷积核在输入上移动时每次移动的距离,直接上图来说明。其中
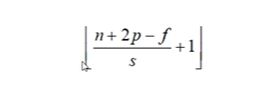
按红框来移动的话stride = 1;按蓝色框来移动的话stride = 2。加入stride后,输出的计算有一些变化,假设输入大小为n*n,卷积核大小为ff, padding大小为p,stride大小为s,那么最后的输出大小为:
下面这个公式要熟记,有了这个公式,就可以计算应该Padding的大小,或者步长Stride的大小
3、卷积核通道数的计算
卷积核有三种属性,分别为,大小,个数,通道数。
卷积核的个数不一定是一个,卷积核的通道数也不一定是一个。
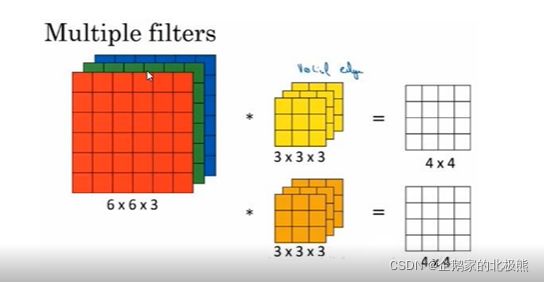
重点来了:这贯穿了整个卷积的计算和模型的优化
单个卷积核通道数 = 输入的通道数
卷积核的个数 = 输出通道数
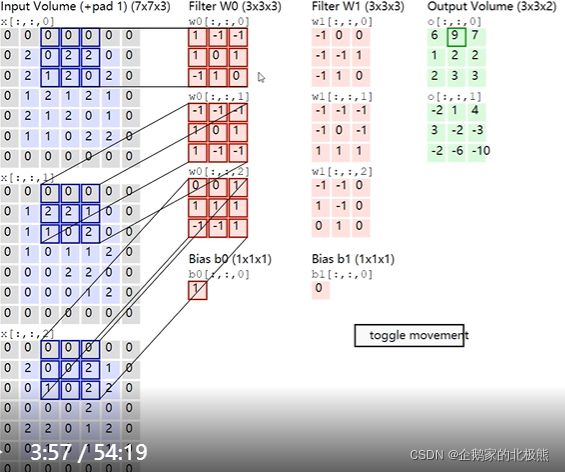
多通道卷积计算
每个通道做单通道卷积计算,不同通道结果相加
有偏置项的加上偏置项
多卷积核输出计算:拼接
每个卷积核做单个卷积核计算,多个卷积核的运算结果片接在一起,记得是拼接
拼接就说明,有多少个卷积核,输出就有多少通道。
这三个知识点很重要,后期产生的新模型的理解离不开这三个知识。
下面这个动图网址可以很好的帮助你理解多核多通道卷积的计算:http://cs231n.github.io/assets/conv-demo/index.html
4、池化层
卷积网络中,除了卷积层以外,还有池化曾和归一化层。我们先来看一下池化层。池化层有最大值池化max-pooling,mean-pooling,自适应池化等。
做池化的目的是,对图片进行压缩,减少特征层大小
池化层同样具有步长和尺寸
池化层是不能改变通道数的
池化层是没有参数的
4.1、max-pooling
池化层依然是在窗口中做计算,如下图:
取窗口中数据的最大值
步长为2,大小2x2

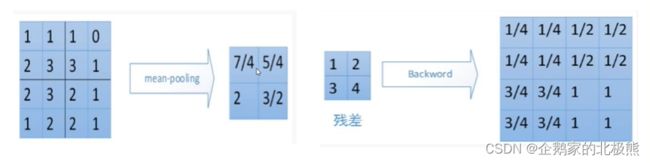
4.2、mean-pooling
池化层依然是在窗口中做计算,如下图:
对窗口中的数据求平均值
步长为2,大小2x2
5、dropout和dropconnect、DropBlock、Disout提升模型精准率
前面我们提到在做卷积之后,要加上全连接层才可以做图像分类等任务,那么dropout一般在全连接层会用到
训练神经网络模型时,如果训练样本比较少,可以使用Dropout来一定程度减少过拟合。
重点:
dropout,等机制都只训练的时候才会用,预测的时候不能用。
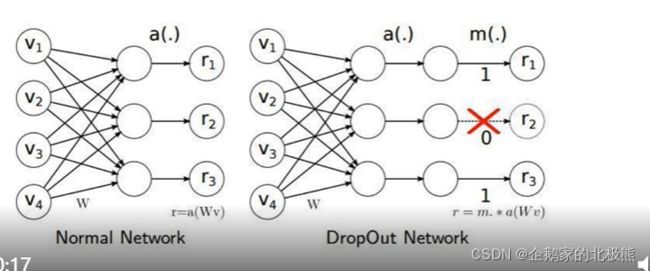
1、dropout
为什么在在训练的时候才可以用,预测的时候不能用呢,因为作用机制:
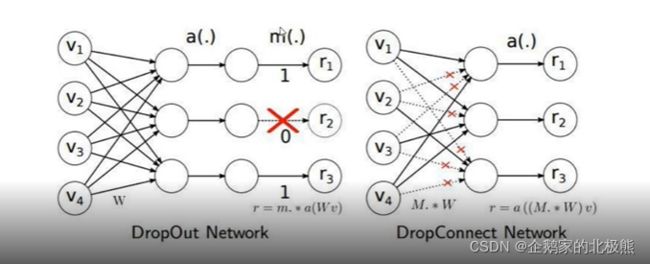
Dropout:随机抑制某一神经元作用(工作),使得输出为0
抑制的是神经元的输出
2、dropconnect
DropConnect:训练过程中,不是随机的将隐藏节点变为0,而是将节点中每个与其相连接的输入权值以1-p的概率编程0
抑制的是神经元的输入权值。
3、DropBlock
DropBlock一般在卷积中用
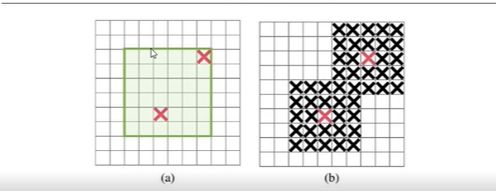
DropBlock和dropout的区别在于:
- dropout删除的是独立的随机单元(输出)
- DropBlock是从某层的feature map中删除相邻区域
Dropout的参数
block_size:控制要删除的块的大小
y:控制删除多少个激活单元
改进:
相比于所有feature channel共享一个DropBlock,每个 feature channel独立一个DropBlock更好
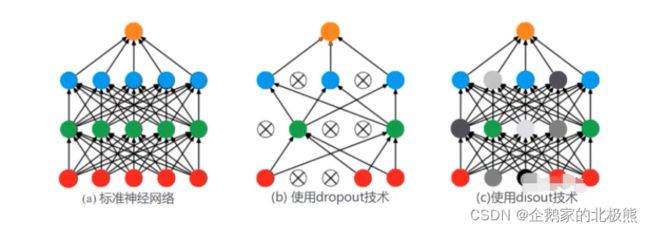
4、Disout
Disout是提出的新型替代方案,是一种通过研究“特征图扰动”来增强神经网络的泛化能力的方法。
作用机制(同样对比dropout看):
简单来说:对输出特征记性扰动(加入噪音),而不是丢弃
具体实现:根据网络中间层的Rademacher复杂度(ERC),确定给定深度神经网络的误差上届。将扰动图引入特征图,来降低网络的Rademacher复杂度,从而提升泛化能力
6、不同激活函数大PK
激活函数的作用是做一和非线性的映射,在反向传播的过程中,根据激活函数的导数来更新权重。
6.1、sigmoid函数
作用机制:
将所有数据映射到(0,1)之间,很好的表达了神经元的激活与未激活的状态,适合二分类。
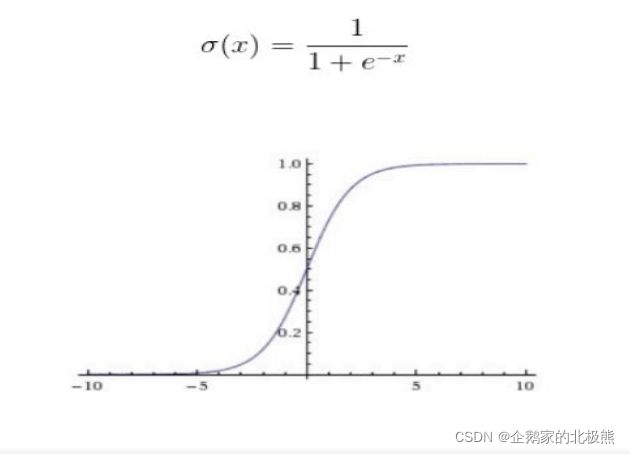
缺点:
sigmoid容易饱和,到那个输入非常大或者非常小的时候,函数曲线非常平坦,如上图所示,梯度非常接近于0,
在反向传播中,我们需要用sigmoid的导数来更新权重,如果导数基本为0,会导致权重没有什么更新,造成梯度弥散(梯度消失)。
与梯度消失相对应的时梯度暴涨,即梯度很大,这个时候要进行梯度裁剪。来解决。
6.2、tanh函数
作用机制:
tanh是在sigmoid基础上进行改进,将压缩范围调整到(-1.1)。
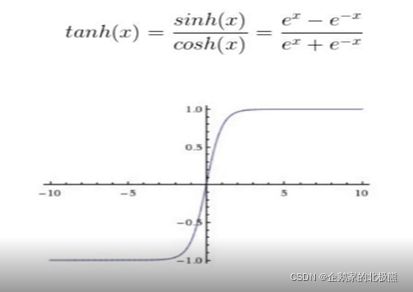
缺点:
任然存在梯度弥散问题
6.3、relu函数
作用机制:
relu函数是是目前比较主流的激活函数,多用于图像模型,他的公式简单,输入小于零的时候为0,输入大于零的时候为本身。
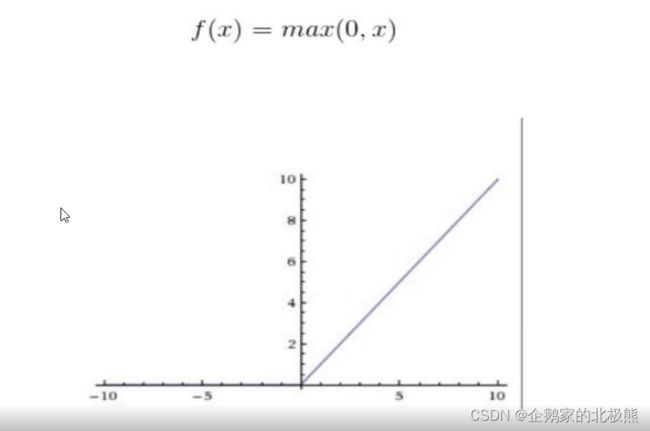
缺点:
当值为负数(权重为负数)的时候,直接置为0了。
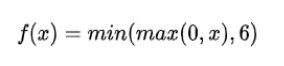
6.4、Relu6函数
作用机制:
多Relu做了一个限制,限制最大输出值为6
**应用场景(目的):**用在移动端设备的float16(float16这种低精度不能很好的描述大的数值范围)的低精度场景。
函数:
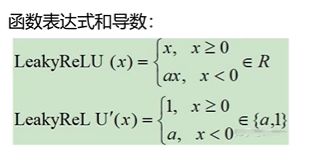
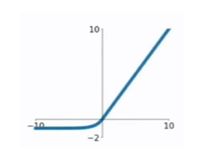
6.5、Leaky ReLU & PReLU
这两个函数是分段函数
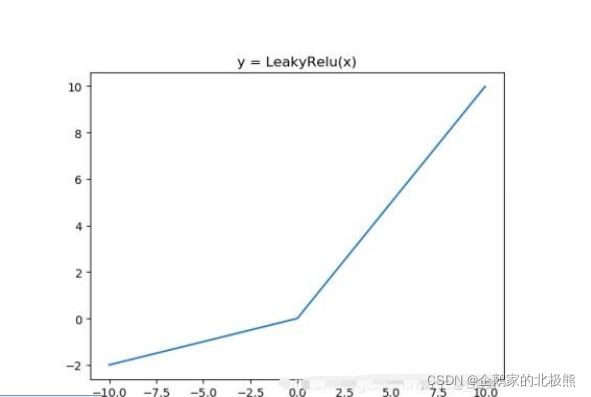
作用机制:
在Relu上做的改进,当值为负数的时候,加上一个为a的斜率(乘a)
a一般取值0.25
a也可以作为学习参数参与到网络的训练中去。
表达式和导数公式:
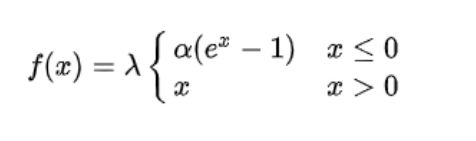
6.6、ELU函数
作用机制:
改进Relu函数,使得在值为负数的时候有一定的输出,而这部分的输出还具有一定的抗干扰能力
缺点:
还是具有梯度饱和和知乎运算问题
公式:

6.7、SELU函数
表达式:
作用机制:自我标准化
当其中参数取值为![]()
时,在网络权重服从正态分布的情况下,各层输出的分布会向标准正态分布靠拢。
优点:
避免梯度消失和爆照问题。让结构简单的前馈盛景网络获得甚至超越state - of - the - art的性能
6.8、Swish函数
表达式:
![]()
b是个常数或者可以训练的参数
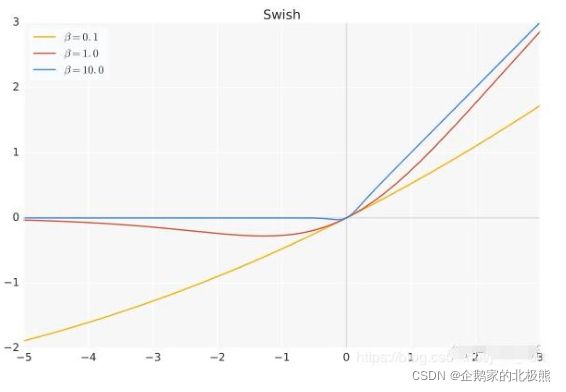
Swish特点
无上界,有下界,平滑,非单调
Swish在深层模型上优于Relu(也不一定,还是看数据集)
还有很多,不写了,有的时候就是试验,那个好用哪个。
7、卷积后的全连接层
全连接层在整个卷积的过程中起到的是“分类器”的作用,全连接的核心操作就是矩阵向量乘积 y = Wx
值得注意的是,在进入全连接层之前要把卷积的结果进行拉平。
8、深度学习的归一化层
在网络的每一层输入的时候,往往要加入归一化层,先做一个归一化处理,在进入网络的下一层。归一化层也属于网络的一层:
基本流程:
卷积————>归一化————>激活————>池化
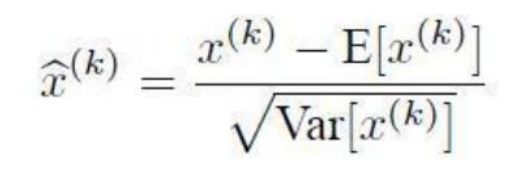
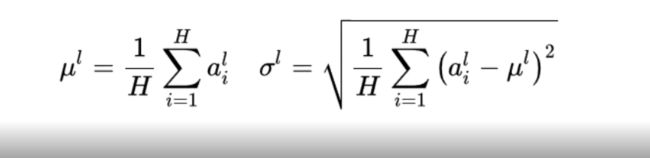
做归一化必不可少的是求两个值:
- 平均值
- 方差
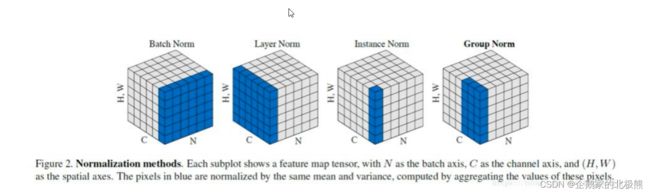
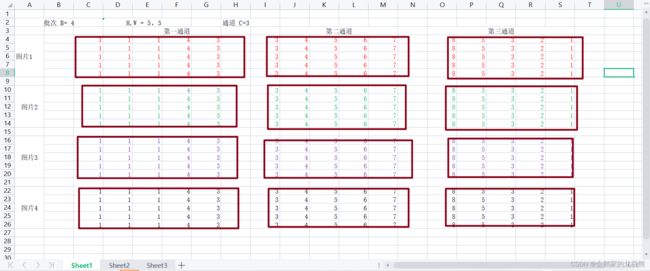
那么这四种归一化的不同 就在于在哪个维度上求这两个值。根据上边的图我们举个例子
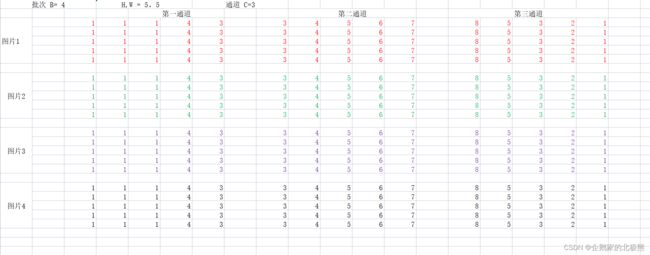
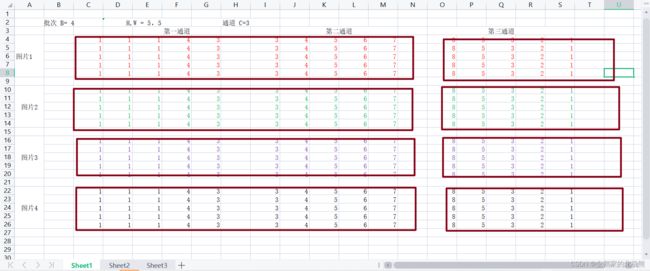
现在假设:
训练数据的形状 【B,C,W,H】
B:代表一个批次的图片数量
C:代表通道数
W,H:代表图片的维度
一个批次数据形式如下:
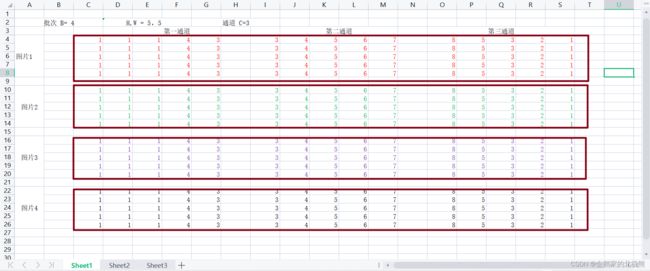
8.1、Batch Normalization(BN)批归一化
对于上面的例子,BN即对这些值做归一化:
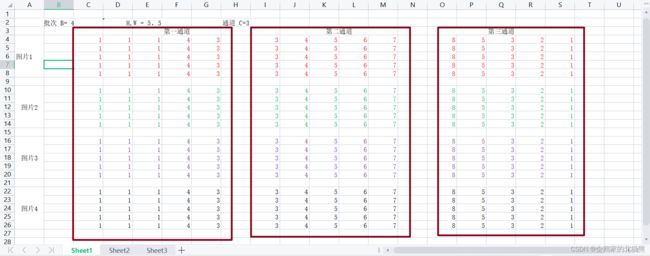
具体操作:
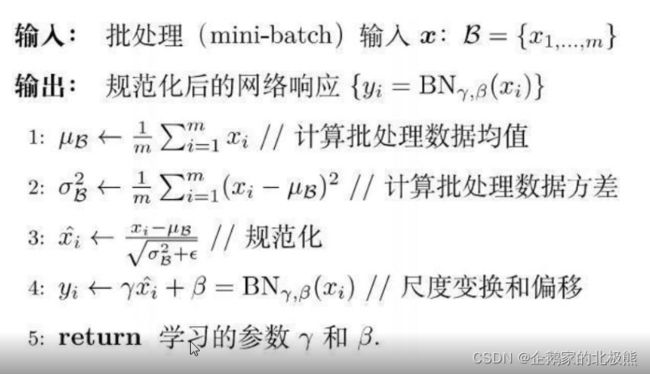
在训练神经网络时,同样学习归一化中的两个参数。
加入BN层的优点:
- 梯度传递更加顺畅,加速收敛
- 不容易导致神经元饱和,防止梯度消失,保证模型收敛(梯度弥散,梯度爆炸)
- 但是最好不要使用rlue激活函数,因为归一化以后,数据满足正太分布,在0~1之间波动,使用sigmiod,tanch更好
- 学习率可以设置的大一点
- 对于初始值的依赖更少
缺点:
- 如果网络层比较深,加入BN层,可能会导致模型训练速度很慢
- 受批次大小影响
- BN层慎用
均值和方差的传递:
上一批次的归一化操作,得出一个用于归一化的均值和方差值
当前次进来时,先计算当前批次的均值,方差u2,再上一批次得到的均值和方差同样进行传递下来,传递的方式是以一定的比例进行传递,比如上一批次得到的是u1,那么当前批次归一化值等于 a x u1 +u2
训练模型结束后保存最后批次的归一化结果,用于新数据做归一化操作的均值和方差。
import numpy as np
arr = np.arange(24).reshape(2,3,2,2)#B,C,H,W
def BN(X,gamma,beta):
arr = X
eps = 1e-5
arr_m_ln = np.mean(arr,axis=(0,2,3),keepdims=True)
arr_v_ln = np.var(arr, axis=(0,2,3), keepdims=True)
x_normalized = (arr - arr_m_ln) / np.sqrt(arr_v_ln + eps) # 层归一化
result = gamma * x_normalized + beta
8.2、Group Normalization(GN)组归一化
这个要与LN对着看,LN是所有通道,GN是分组后一个组中的通道,这里我们假设分成两组
用在分组卷积上
主要是针对Batch Normalization对小batchsize效果差,GN将channel方向分group,然后每个group内做归一化,算(C//G)Hw的均值,这样与batchsize无关,不受其约束。
def GN(X,gamma,beta):
arr2 = X.reshape(2,3,1,2,2)#B,C,H,W——>B表示不同的批次,即不同的样本
#LN层归一化
eps = 1e-5
arr_m_ln = np.mean(arr2,axis=(2,3,4),keepdims=True)#让不同的样本做归一化
arr_v_ln = np.var(arr2,axis=(2,3,4),keepdims=True)#求方差
x_normalized = (arr2 - arr_m_ln)/np.sqrt(arr_v_ln + eps)#层归一化
result = gamma * x_normalized + beta#gamma,beta是要学习的参数
print('我们的数组是:\n',arr2)
print('arr_m_ln:\n',arr_m_ln)
8.3、Layer Normalization(LN)层归一化
层归一化,对于对于上面的BN归一化,他是对批次的大小比较敏感,由于每次计算的均值和方差都在同一个批次内,则计算的均值和方差不足以代表整个数据的分布,这也可以看做是BN归一化的一个缺点。
- LN中同层神经元的输入具有相同的均值和方差,不同的样本具有不同的均值和方差。
- BN中则针对不同神经元的输入计算均值和方差,同batch中拥有相同的均值和方差
- LN用于RNN效果比较明显,但是在CNN上不如BN
def LN(X,gamma,beta):
arr = X#B,C,H,W——>B表示不同的批次,即不同的样本
#LN层归一化
eps = 1e-5
arr_m_ln = np.mean(arr,axis=(1,2,3),keepdims=True)#让不同的样本做归一化
arr_v_ln = np.var(arr,axis=(1,2,3),keepdims=True)#求方差
x_normalized = (arr - arr_m_ln)/np.sqrt(arr_v_ln + eps)#层归一化
result = gamma * x_normalized + beta#gamma,beta是要学习的参数
print('我们的数组是:\n',arr)
print('arr_m_ln:\n',arr_m_ln)
8.4、Instance Normalization(IN)归一化
图像风格华中,生成结果,主要依赖于某个图像的图像实例,因而要对H,W做归一化操作

优点:
- 加速模型收敛
- 保重每个图像实例之间的独立性
def IN(X,gamma,beta):
arr3 = X # B,C,H,W——>B表示不同的批次,即不同的样本
# LN层归一化
eps = 1e-5
arr_m_ln = np.mean(arr3, axis=(2, 3), keepdims=True) # 让不同的样本做归一化
arr_v_ln = np.var(arr3, axis=(2, 3), keepdims=True) # 求方差
x_normalized = (arr3 - arr_m_ln) / np.sqrt(arr_v_ln + eps) # 层归一化
result = gamma * x_normalized + beta # gamma,beta是要学习的参数
print('我们的数组是:\n', arr3)
print('arr_m_ln:\n', arr_m_ln)
重点在BN层的原理一节优缺点,面试常问
9、参数初始化操作
神经网络的各种层都要学习参数,开始的时候要初始化参数,太大太小都不好。
- 参数过小:会导致神经元输入过小,经过多层之后,信号慢慢消失,参数过小还会使得sigmoid型函数丢失非线性能力(参考sigmoid曲线,在靠近0的位置,趋近于线性,)。
- 参数过大,导致输入状态过大,同样对于sigmoid型函数,激活值变得饱和,导致梯度接近于0.
9.1、random initialization 随机初始化
随机初始化的弊端:
- 一旦随机分布不当,会导致网络优化陷入困境(局部最优解)。从而影响模型收敛速度,甚至不收敛。
9.2、Xavier初始化
Xavier initialization可以解决上面的问题! Xavier初始化的基本思想是保持输入和输出的方差一致,这样就避免了所有输出值都趋向于0。tanh激活函数下,输出值依然保持着良好的分布,那么ReLU神经元。
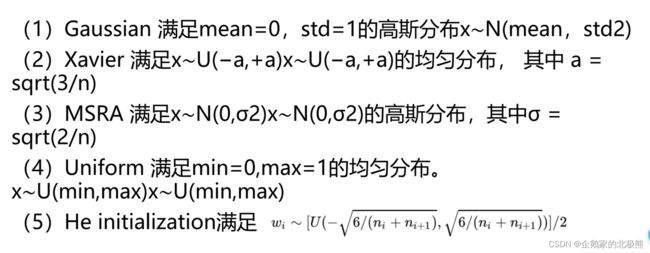
9.3、其他初始化方法
10、学习率
学习率(Learning rate),作为监督学习以及深度学习中的超参数:
- 决定着目标函数能否收敛到局部的最小值
- 决定着收敛到最小值的速度
- 合适的学习率可以兼顾以上两点
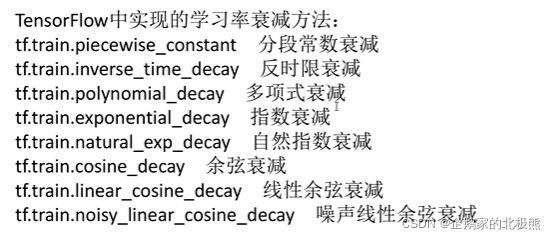
在机器学习中学习率我们是设定的固定超参值,实际上学习lv也是可以随着训练变化的。
对比大小学习率的优缺点:

经过试验得到:
刚开始训练时:学习率以0.1~~0.001为宜
一定轮次后:逐渐减缓
接近训练结束:学习率的衰减应该在100倍以上
另外,除了修改激活函数,修改学习率也是一种优化模型的方法。
11、数据增强必不可少
对于图像模型,数据增强常用的两种方式
- 翻转
- 裁剪
数据增强是从数据本身提升模型效果。
12、优化器
12.1、SGD+动量
在训练的时候我们更新梯度的时候会用到优化器,这里的优化器我们用SGD+动量的形式
普通的SGD方式;
theat = theta - lr*grad
SGD+动量:在grad上加上一个记忆参数,用来传递上一次grad的信息
初始化:
v0
monentum = 0.9 一般都设置成0.9
theta0
第一次迭代:
v1 = v0+monentumgrade
theta1 = theta0 - lrv1
第二次迭代:
v2 = v2+monentumgrade
theta2 = theta1 - lrv2
是这样迭代更新的
12.1、Adam+动量
后面再更新