数字图像处理期末总结
数字图像处理期末总结
1、图像平滑/锐化的几种掩模形式;
平滑:
(1)邻域平均法:
(2)中值滤波:
(3)空间域低通滤波:
(4)频率域低通滤波:如理想低通(有“振铃”效应,在低频和高频之间的平滑过渡)、巴特沃斯低通(没有明显的振铃效果,处理效果比理想低通好)、高斯低通、指数低通(衰减更快,比巴特沃斯低通更模糊)、梯形低通(效果介于理想低通和平滑衰减型之间,有一定的振铃效果)
(5)多幅图像平均法:顾名思义
(6)小波去噪,高频系数置零(最简单)、硬阈值方法、软阈值方法、非线性软阈值、双边滤波器(边缘保持去噪)
锐化:
目的:去模糊,突出细节(局部对比度增强)。
要求:抑制低频成分,突出高频成分(基于高通滤波)。
(1)空域高通滤波:微分法(包含各种微分算子):算子(Roberts算子(交叉梯度)、Prewitt算子、Sobel算子、Laplacian算子(二阶微分)、Wallis算法)。 掩模法。
(2)频域高通滤波:(理想高通、巴特沃斯高通、高斯高通、指数高通、梯形高通)
邻域平均法属于空间域处理方法。其思想是利用图像点(x,y)及其邻域若干个像素的灰度平均值来代替点(x,y)的灰度值,结果是对亮度突变的点产生了“平滑”效果。邻域平均是基于图像上的背景或目标部分 灰度的变化是连续的、缓慢的,而颗粒噪声使图像上一些像索的灰度造成突变。通过邻域平均可以平滑突变的灰度。
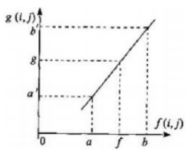
2、如何运用(线性)灰度变换;
线性变换:令图像f(i,j)的灰度范围为[a,b],线性变换后图像g(i,j)的灰度范围为[a1,b1],g(i,j)与f(i,j)的关系如下图所示:
![]()
f在曝光不足或者过度的情况下,图像灰度会局限在一个很小范围内,这时显示器看到的将是一个模糊不清,似乎是一个没有层次的图像。采用线性变换对图像每一个像素灰度做线性拉伸,将有效改善图像视觉效果。
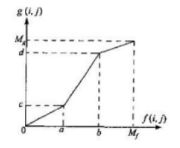
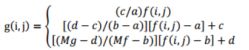
分段线性变换:为了突出感兴趣的目标灰度空间,相对抑制不感兴趣的灰度空间,可采用分段线性变换,常用的是三段线性变换,表达式如下:
图中对灰度区间[a,b]段进行了拉伸,而灰度区间[0,a]和[b,Mf]段则被压缩,通过调整拐点的位置和分段直线的斜率,可对任一灰度区间进行拉伸或者压缩。
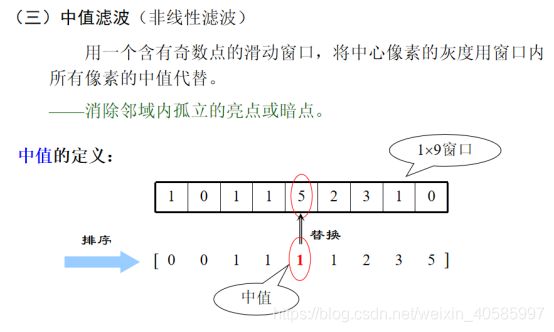
3、如何运用中值滤波;
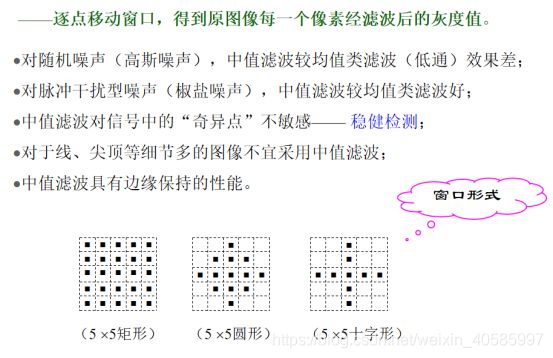
用一个含有奇数个点的滑动窗口,将中心像素的灰度用窗口内所有像素的中值代替,消除邻域内孤立的亮点或暗点。逐点移动窗口,得到原图像每一个像素经滤波后的灰度值。
应用场景:
对随机噪声(高斯噪声),中值滤波较均值类滤波(低通)效果差;
对脉冲干扰型噪声(椒盐噪声),中值滤波较均值类滤波好;
中值滤波对信号中的“奇异点”不敏感——稳健检测;
对于线、尖顶等细节多的图像不宜采用中值滤波;
中值滤波具有边缘保持的性能 。
4、逆滤波复原、维纳滤波复原、约束滤波复原的特点;
逆滤波复原:逆滤波复原方法数学表达式简单,物理意义明确,但存在缺点:由于噪声存在,若传递函数H(u,v)有零点或很小,将导致噪声放大。而且,信号在离原点较远时衰减很快,但噪声信号处于高频范围。因此复原只能局限于频域中的有限区域,且选择信噪比高的频率。

维纳滤波复原:
当H(u,v)–>0或者幅值很小时,Hw(u,v)的分母不为0,避免了0除的问题,并且Hw(u,v)=0,避免了逆滤波的噪声放大问题;
若Sn/Sf–>0,说明信噪比很高,这时Hw(u,v)=1/H(u,v),即为逆滤波复原的方法;
反之信噪比较低时,Hw(u,v)=0,此时表示图像无有用信息存在,因而不能从完全是噪声的信号中复原有用信息。
注:Sn为噪声的功率谱,Sf为输入图像的功率谱

约束滤波复原:
准则:在满足约束条件下,使所定义的平滑函数最小(去噪),a为待定参量,只与噪声的方差有关。
约束最小二乘方滤波要求噪声的方差,这些参数可通过给定的退化图像计算出来,这是约束最小二乘方滤波的一个重要优点。
非约束复原:假设退化模型g=Hf+n,定义代价函数J(f)=||g-Hf||2,在没有任何约束条件下寻找使J(f)最小的解。约束复原:除了要求退化系统函数外,还要知道某些噪声的统计特性或噪声与图像的某些相关情况,根据了解噪声先验知识不同采取不同约束条件从而得到不同的图像,把问题看成在约束条件下求解最优解的情况。约束条件n=g-Hf。







5、图像分割的主要方法;
图像分割方法一般是基于像素的两个特性之一:不连续性和相似性。
不连续性:指不同区域之间像素值差别比较大,在边界上具有某种不连续性—基于不连续性的分割方法。
相似性:指区域内部像素值之间具备一定的相似性—基于区域的分割方法。
基于不连续性的分割方法:
(1)、门限法(阈值分割)
阈值分割方法实际上是输入图像f到输出图像g的如下变换:其中,T为阈值;对于物体的图像元素,g(i,j)=1,对于背景的图像元素,g(i,j)=0。
阈值分割的优点是计算简单、运算效率较高、速度快。
(2)、边缘检测
两个具有不同灰度值的相邻区域之间总存在灰度边缘,而灰度边缘是灰度值不连续(或突变)的结果。常用一阶和二阶导数来检测边缘(通过设置阈值将边缘像素与非边缘像素二值化)。
(3)、间断检测
间断检测包括点检测和线检测。寻找间断最一般的方法是模板检测——计算模板所包围区域的灰度级与模板系数的乘积之和,若大于阈值,则视为间断处。
孤立点:该点的灰度级与其背景的差异相当大,并且它所在的位置是一个均匀的或者近似均匀的区域。
基本思想:如果一个孤立点与它周围的点很不相同,则很容易被上述模板检测到。在灰度级为常数的区域,模板响应为0。
(4)、边缘连接
原理:分析图像中每个边缘点的一个小邻域内像素的性质,将所有相似点连接起来,就是共同满足一定准则的像素组成的一条边缘。
基于区域的分割方法:
(1)、区域生长
对每个需要分割的区域找一个种子像素作为生长的起点,将种子像素邻域中与其有相似性质的像素合并到种子像素所在的区域中。将这些新像素当作新的种子像素重复上述过程,直到再没有满足条件的像素被包括进来。
(2)、分裂与合并
先从整幅图像开始,通过不断分裂把图像分成任意大小且不重叠的区域(实际中常用四分树),直到每个区域的像素满足一致性准则,然后再合并一致性区域。
(3)、分水岭算法
将相连接的物体目标从背景中提取出来并互相分开。在拓扑视图中水从汇水盆地的最低点上涨随着水进一步上涨两个相邻汇水盆地的水开始会合;在此会合处建造水坝。随着水继续上涨,多处开始会合,水坝也在延伸最终完成的水坝,即分水线,完成分割。
参考:https://www.cnblogs.com/a-runner/p/14141822.html

6、区域描述的主要方法;
有两类: 形态描述和纹理分析
①形状描述是用区域的外部特征—形状特征来表示区域,常用的方法有:傅里叶描述子、矩描述子、参数化描述方法、简单描述子、拓扑描述、利用主分量描述、关系描述收缩和骨架化等。
②纹理分析是用区域的内部特征—颜色、纹理等来提供有关区域的平滑度、粗糙度、灰度分布规律性等特性的度量,常用的方法有:统计描述、灰度共生矩阵、频谱方法等
1.傅里叶描述子:若某一区域的边界是闭合的,对于边界上的任一固定点,沿边界曲线移动的坐标变换是周期函数,该周期函数可以展开为傅立叶级数。用变换系数来描述区域形状。
2.矩描述子:若一个区域以内部形式给出,可用矩描述子描述,矩描述子由数学变换得到,它对大小旋转平移的变化均是不变的
3.参数化描述方法:包括曲线描述法和直线代替曲线分段拟合,曲线描述就是用简单曲线拟合方法得出区域边界。直线代替曲线分段拟合①用直线对两个端点进行连接,然后选一个离该线最远的点,如C点再用AC和BC代替AB.②对每一直线重复①直到满意为止.
4.收缩和骨架化:从外向内逐层去除像素—收缩为单一像素。每一去除层保持八连通。如果区域内某一点与一个以上的边界点有相同的距离则该点的集合组成骨架抽取骨架描述区域。
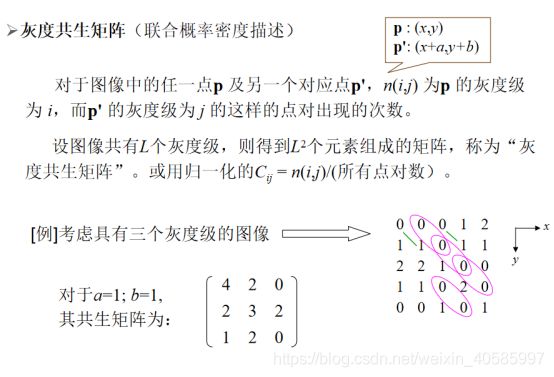
7、什么是灰度共生矩阵,给定一幅图像,如何计算其共生矩阵;
在图像中任意一点(x,y)及偏离它的一点(x+a,y+b)(其中a,b为整数) 构成点对。设该点对的灰度值为(f1,f2),假设图像的最大灰度级为L,则f1与f2的组合共有L*L种。对于整幅图像,统计每一种(f1,f2)值出现的次数,然后排列成一个方阵,再用(f1,f2)出现的总次数将它们归一化为出现的概率P(f1,f2),由此产生的矩阵为灰度共生矩阵。
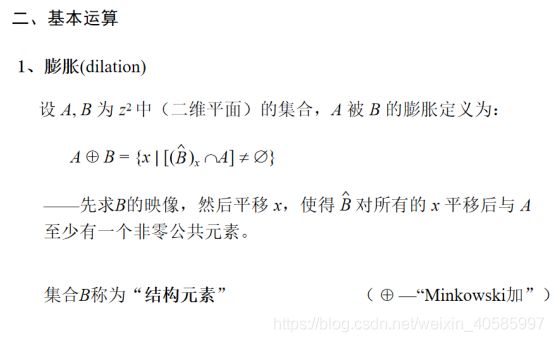
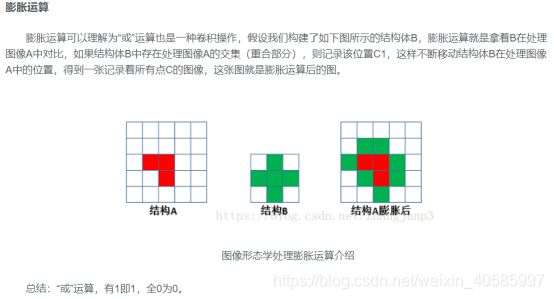
8、如何运用形态学中的基本运算:膨胀、腐蚀、开、闭(例题);
膨胀:连接断裂。灰度膨胀:如果所有结构元素为正,输出图像将比输入图像亮;黑色细节减少,去除程度取决于结构元素。
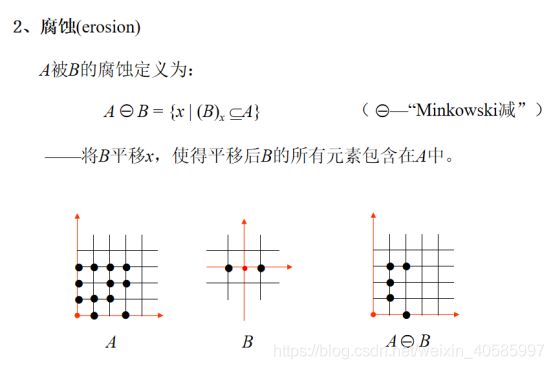
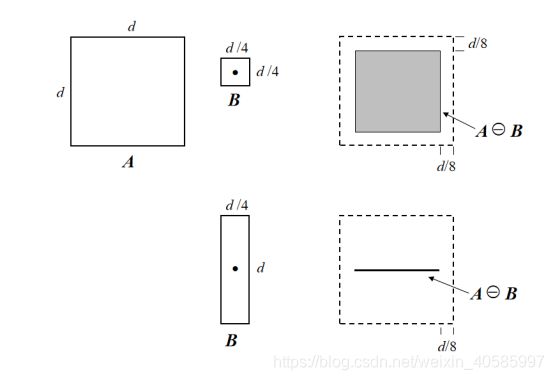
腐蚀:消除不相关的细节。灰度腐蚀:如果所有结构元素为正,输出图像将比输入图像暗;明亮细节减小,去除程度取决于结构元素。
开运算:(先腐蚀后膨胀)可使凸出部分“融化”而圆润,凹角不变。去除较小的亮点
闭运算:(先膨胀后腐蚀)可使补集的凸出部分“融化”,即A的凹角“融合”,凸角不变。去除较小的暗点
使用时特别注意中心点,根据中心点画图!
A开B是A的子集,A是A闭B的子集!



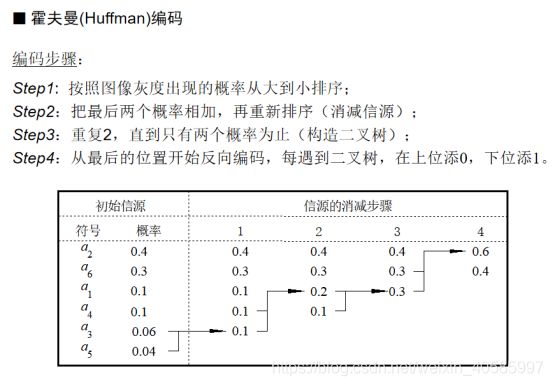
9、统计编码主要方法 (Huffman);
(做题熟悉)从后往回标注0,1时,先把二叉树生成的上一编码落下来,然后在编码后面分别加0,1;要注意an对应的码值要与其概率值对应!!!最后可用自己方法验证!