【毕业设计】基于单片机的家庭智能监控系统 - 物联网 stm32 嵌入式
文章目录
- 1 简介
- 2 主要器件
-
- 2.1 ESP32-CAM 模块
- 2.2 红外热释电传感器
- 3 实现效果
- 4 部分实现代码
- 5 最后
1 简介
Hi,大家好,这里是丹成学长,今天向大家介绍一个学长做的单片机项目
基于单片机的家庭智能监控系统
大家可用于 课程设计 或 毕业设计
单片机-嵌入式毕设选题大全及项目分享:
https://blog.csdn.net/m0_71572576/article/details/125409052
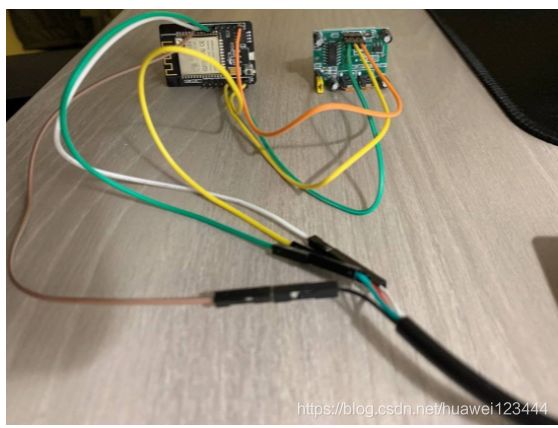
2 主要器件
- 红外传感器-7m
- ESP32-CAM
- USB到TTL串行转换器5V
- 主控MCU(可选)
2.1 ESP32-CAM 模块
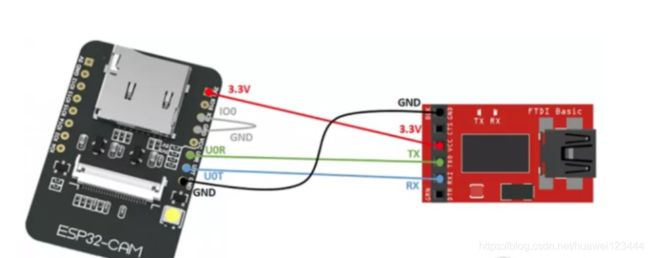
模块包含一块ESP32-CAM的MCU和一个OV2640的200W像素摄像头,ESP32-CAM除了支持OV2640外还支持OV7670摄像头,不过7670只有30W像素


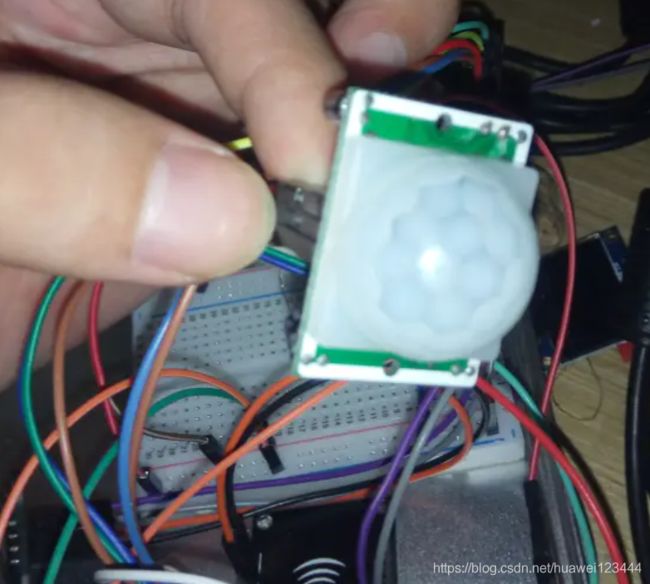
2.2 红外热释电传感器
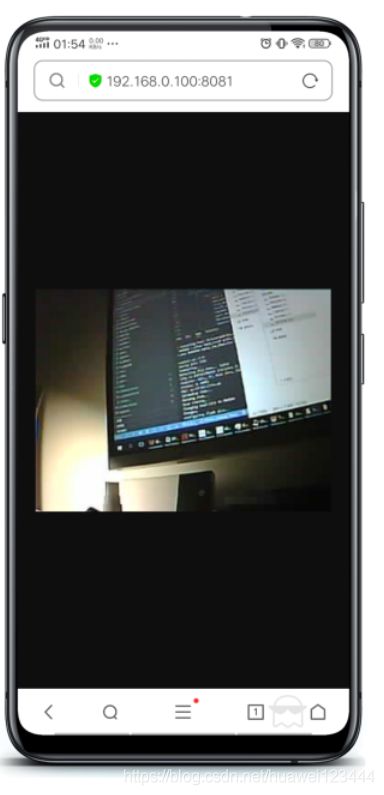
3 实现效果
当是房间内有人出现,摄像头自动打开,通过手机或者电脑浏览就可以访问摄像头
4 部分实现代码
部分关键代码:
/*
albino98
https://github.com/albino98/telegram_esp32.git
*/
#ifdef ESP32
#include 单片机-嵌入式毕设选题大全及项目分享:
https://blog.csdn.net/m0_71572576/article/details/125409052