深度学习基础20(权重衰退以及代码实现详解)
权重衰减
下面来学习一些正则化模型的技术。
为什么要正则化?
- 我们可以通过去收集更多的训练数据来缓解过拟合。 但这可能成本很高,耗时颇多,或者完全超出我们的控制,因而在短期内不可能做到。 假设我们已经拥有尽可能多的高质量数据,便将重点放在正则化技术上。
实际上,限制特征的数量是缓解过拟合的一种常用技术。
但简单地丢弃特征对于这项工作来说可能过于生硬。 我们继续思考多项式回归的例子,考虑高维输入可能发生的情况。 多项式对多变量数据的自然扩展称为单项式(monomials), 也可以说是变量幂的乘积。 单项式的阶数是幂的和。
注意,随着阶数的增长,带有阶数的项数迅速增加。
即使是阶数上的微小变化,比如从2到3, 也会显著增加我们模型的复杂性。
因此,我们经常需要一个更细粒度的工具来调整函数的复杂性。
范数与权重衰减
权重衰减是最广泛使用的正则化的技术之一
在训练参数化机器学习模型时, 权重衰减(weight decay)是最广泛使用的正则化的技术之一, 它通常也被称为2正则化。
这项技术通过函数与零的距离来衡量函数的复杂度, 因为在所有函数中,函数=0(所有输入都得到值0) 在某种意义上是最简单的。
一种简单的方法是通过线性函数 ()=⊤ 中的权重向量的某个范数来度量其复杂性, 例如‖‖2。
要保证权重向量比较小, 最常用方法是将其范数作为惩罚项加到最小化损失的问题中。
将原来的训练目标最小化训练标签上的预测损失, 调整为最小化预测损失和惩罚项之和。
现在,如果我们的权重向量增长的太大, 我们的学习算法可能会更集中于最小化权重范数‖‖2。
回顾一下线性回归例子。 我们的损失由下式给出:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-viKae2eu-1648806333398)(C:\Users\Lenovo\Documents\Tencent Files\850604703\FileRecv\MobileFile\Image\OABQ[X2NS0Q13DM7700W7M4.png)]](http://img.e-com-net.com/image/info8/fbe2ce0882914bd9900d7ba7627f66dc.jpg)
()是样本i的特征, ()是样本的标签, (,)是权重和偏置参数。
为了惩罚权重向量的大小, 我们必须以某种方式在损失函数中添加‖‖2, 但是模型应该如何平衡这个新的额外惩罚的损失?
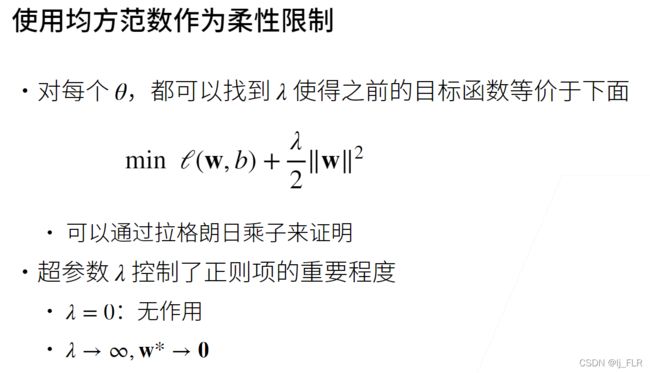
实际上,我们通过正则化常数λ来描述这种权衡, 这是一个非负超参数,我们使用验证数据拟合:
对于=0,我们恢复了原来的损失函数。 对于>0,我们限制‖‖的大小。
这里我们仍然除以2:当我们取一个二次函数的导数时, 2和1/2会抵消,以确保更新表达式看起来既漂亮又简单。
为什么使用平方范数而不是标准范数(即欧几里得距离)?
- 这样做是为了便于计算。 通过平方2范数,我们去掉平方根,留下权重向量每个分量的平方和。 这使得惩罚的导数很容易计算:导数的和等于和的导数。
为什么我们首先使用2范数,而不是1范数。
- 事实上,这个选择在整个统计领域中都是有效的和受欢迎的。 2正则化线性模型构成经典的岭回归(ridge regression)算法, 1正则化线性回归是统计学中类似的基本模型, 通常被称为套索回归(lasso regression)。
- 使用2范数的一个原因是它对权重向量的大分量施加了巨大的惩罚。 这使得学习算法偏向于在大量特征上均匀分布权重的模型。 在实践中,这可能使它们对单个变量中的观测误差更为稳定。
- 相比之下,1惩罚会导致模型将权重集中在一小部分特征上, 而将其他权重清除为零。 这称为特征选择(feature selection),这可能是其他场景下需要的。
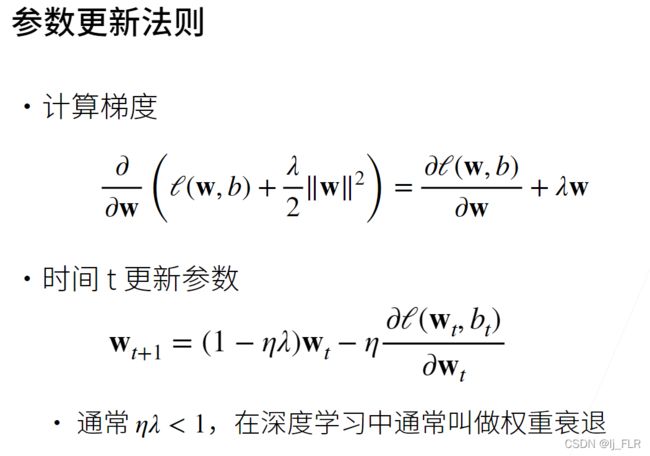
2正则化回归的小批量随机梯度下降更新如下式:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-owseuxGi-1648806333400)(C:\Users\Lenovo\Documents\Tencent Files\850604703\FileRecv\MobileFile\Image\FK[FXK3)]42%0[4MX{~8LD76.png)](http://img.e-com-net.com/image/info8/5f37a1dca09f4795aed06a458d80ef60.jpg)
我们根据估计值与观测值之间的差异来更新。 然而,我们同时也在试图将的大小缩小到零。
这就是为什么这种方法有时被称为权重衰减。 我们仅考虑惩罚项,优化算法在训练的每一步衰减权重。
与特征选择相比,权重衰减为我们提供了一种连续的机制来调整函数的复杂度。
较小的值对应较少约束的, 而较大的值对的约束更大。
是否对相应的偏置2进行惩罚在不同的实践中会有所不同, 在神经网络的不同层中也会有所不同。 通常,网络输出层的偏置项不会被正则化。
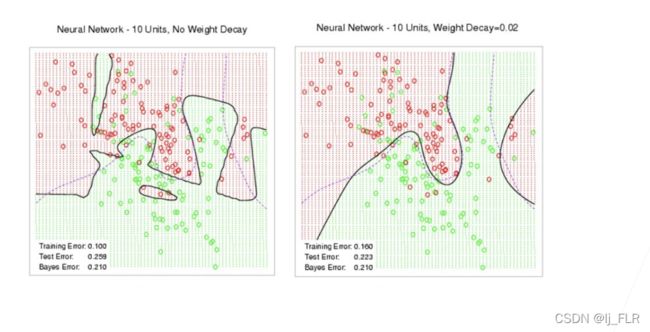
可以看出每次更新参数的时候都会把wt乘以一个小于1的数,所以叫权重衰退
- 权重衰退通过L2正则项使得模型参数不会过大,从而控制模型复杂度
- 正则项权重λ是控制模型复杂度的超参数
高维线性回归
我们通过一个简单的例子来演示权重衰减。
%matplotlib inline
import torch
from torch import nn
from d2l import torch as d2l
首先,生成一些数据,生成公式如下:
(

)
我们选择标签是关于输入的线性函数。 标签同时被均值为0,标准差为0.01高斯噪声破坏。
为了使过拟合的效果更加明显,我们可以将问题的维数增加到=200, 并使用一个只包含20个样本的小训练集。
n_train, n_test, num_inputs, batch_size = 20, 100, 200, 5#这里特别使训练数据集比较小,因为越小越容易过拟合,num_inputs是特征的维度200比较大
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.05#w是0.01,b是0.05
train_data = d2l.synthetic_data(true_w, true_b, n_train)#下面是之前存的一些函数,比如如何生成人工数据集,怎么读取等等
train_iter = d2l.load_array(train_data, batch_size)
test_data = d2l.synthetic_data(true_w, true_b, n_test)
test_iter = d2l.load_array(test_data, batch_size, is_train=False)
从零开始实现
下面我们将从头开始实现权重衰减,只需将2的平方惩罚添加到原始目标函数中。
初始化模型参数
首先,定义一个函数来随机初始化模型参数。
def init_params():
w = torch.normal(0, 1, size=(num_inputs, 1), requires_grad=True)#对w进行初始化,均值为0,标准差为1,之前见过好多次
b = torch.zeros(1, requires_grad=True)
return [w, b]
定义2范数惩罚
实现这一惩罚最方便的方法是对所有项求平方后并将它们求和。
def l2_penalty(w):
return torch.sum(w.pow(2)) / 2#这里没有写入λ,因为要把λ写在外面
定义训练代码实现
下面的代码将模型拟合训练数据集,并在测试数据集上进行评估
def train(lambd):#接受一个输入参数为λ
w, b = init_params()#初始化权重,w,b
net, loss = lambda X: d2l.linreg(X, w, b), d2l.squared_loss#用之前定义的线性回归,d2l.squared_loss使用平方损失函数
num_epochs, lr = 100, 0.003
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])#动画一下我们的效果
for epoch in range(num_epochs):#这就是很标准的训练,两次forloop
for X, y in train_iter:
# 增加了L2范数惩罚项,
# 广播机制使l2_penalty(w)成为一个长度为batch_size的向量
l = loss(net(X), y) + lambd * l2_penalty(w)#这是唯一的不一样
l.sum().backward()
d2l.sgd([w, b], lr, batch_size)
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1, (d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print('w的L2范数是:', torch.norm(w).item())
忽略正则化直接训练
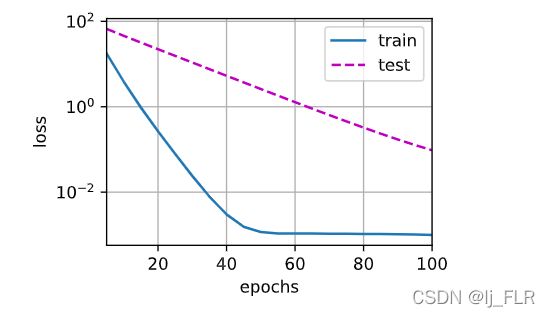
我们现在用lambd = 0禁用权重衰减后运行这个代码。 注意,这里训练误差有了减少,但测试误差没有减少, 这意味着出现了严重的过拟合。
train(lambd=0)
w的L2范数是: 14.011414527893066

使用权重衰减
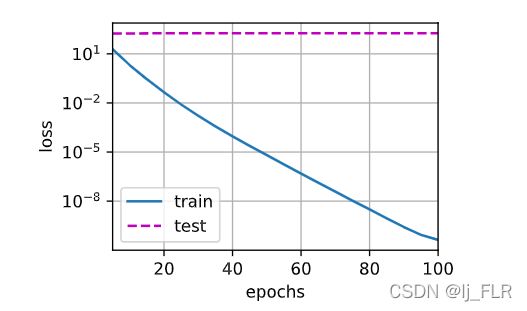
下面,我们使用权重衰减来运行代码。 注意,在这里训练误差增大,但测试误差减小。 这正是我们期望从正则化中得到的效果。
train(lambd=3)
w的L2范数是: 0.35732635855674744
简洁实现
由于权重衰减在神经网络优化中很常用, 深度学习框架为了便于我们使用权重衰减, 将权重衰减集成到优化算法中以便与任何损失函数结合使用。
此外,这种集成还有计算上的好处, 允许在不增加任何额外的计算开销的情况下向算法中添加权重衰减。
由于更新的权重衰减部分仅依赖于每个参数的当前值, 因此优化器必须至少接触每个参数一次。
下面在实例化优化器时直接通过weight_decay指定weight decay超参数。
默认情况下,PyTorch同时衰减权重和偏移。 这里我们只为权重设置了weight_decay,所以偏置参数不会衰减。
def train_concise(wd):
net = nn.Sequential(nn.Linear(num_inputs, 1))
for param in net.parameters():
param.data.normal_()
loss = nn.MSELoss(reduction='none')
num_epochs, lr = 100, 0.003
# 偏置参数没有衰减
trainer = torch.optim.SGD([
{"params":net[0].weight,'weight_decay': wd},#基本上所有的优化算法都会提供一个weight_decay(λ)
{"params":net[0].bias}], lr=lr)
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])
for epoch in range(num_epochs):
for X, y in train_iter:
trainer.zero_grad()
l = loss(net(X), y)
l.mean().backward()
trainer.step()
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1,
(d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print('w的L2范数:', net[0].weight.norm().item())
[这些图看起来和我们从零开始实现权重衰减时的图相同]。 然而,它们运行得更快,更容易实现。 对于更复杂的问题,这一好处将变得更加明显。
train_concise(0)
w的L2范数: 13.390196800231934
train_concise(3)
w的L2范数: 0.4199734032154083
小结
- 正则化是处理过拟合的常用方法:在训练集的损失函数中加入惩罚项,以降低学习到的模型的复杂度。
- 保持模型简单的一个特别的选择是使用2惩罚的权重衰减。这会导致学习算法更新步骤中的权重衰减。
- 权重衰减功能在深度学习框架的优化器中提供。
- 在同一训练代码实现中,不同的参数集可以有不同的更新行为。
- 一般来说,噪音越大,学到的w就越大