Python实现HOG+SVM
文章目录
- 前言
- 一、梯度基础知识
- 二、实例介绍
- 三、计算直方图步骤
- 四、总结
- 五、Python实际操作
前言
由于近期接触到HOG+SVM行人识别检测这一方面,因此总结了一下关于HOG特征的一些基础知识。所引用的视频为sundog-education-hog,在此感谢投稿者。
更新!!! 运用代码更加深刻认识HOG!!在此感谢大奥特曼打小怪兽。
一、梯度基础知识
- 对于函数 f ( x , y ) f(x,y) f(x,y),梯度是一个向量 ( f x , f y ) (f_x,f_y) (fx,fy)
- 一张照片可看作是关于 ( x , y ) (x,y) (x,y)的离散型函数,所以一张图片的梯度可以被计算出来。
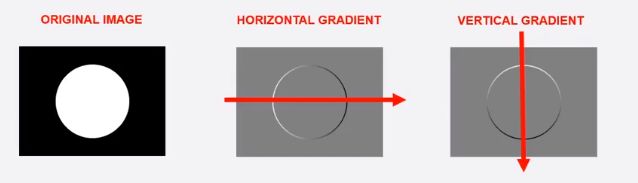
- 对于每一个像素,图像的水平梯度和纵向梯度可以被计算出
- 这些向量有方向 a t a n ( f y f x ) atan(\frac{f_y}{f_x}) atan(fxfy)和大小 ( f x 2 + f y 2 ) \sqrt{(f_{x}^{2}+f_{y}^{2})} (fx2+fy2)
- 梯度值的范围为0-225,黑色为0,白色为225。像素从黑色急剧转为白色称为大的负向变化,颜色会变白色,像素如果仅有小的颜色变化或者没有变化会变为灰色
- 如水平梯度变化,很明显看出黑色-白色的部分变为白色,白色-黑色的部分变为黑色,其他部分为灰色
二、实例介绍
这里,我们来看一个实例,截取一个车子上的一块小的像素,它的像素值为上下左右分别为100,50,70,120:
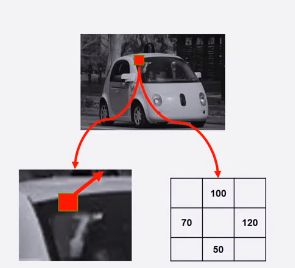
- X方向上的梯度值为120-70=50,Y方向上的梯度值为100-50=50,因此可以得到特征向量为 ( 50 , 50 ) (50,50) (50,50)
- 因此特征向量的大小为 ( 5 0 2 + 5 0 2 ) = 70.1 \sqrt{(50^{2}+50^{2})}=70.1 (502+502)=70.1,特征向量的方向为 t a n − 1 ( 50 / 50 ) = 4 5 ∘ tan^{-1}(50/50)=45^{\circ} tan−1(50/50)=45∘,正如上图左下图的箭头大小和指向
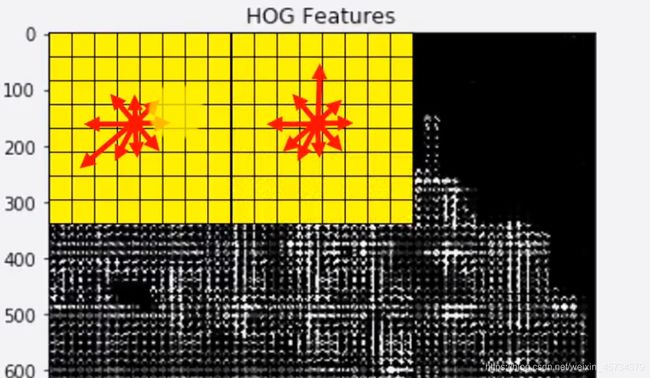
三、计算直方图步骤
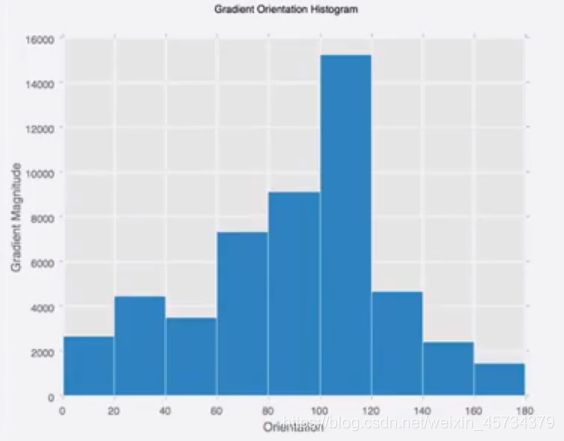
-我们以大卡车为例, 用一个cell(8x8)来计算梯度的大小和方向,总共有64的特征向量的大小和方向

- 创建一个直方图关于这64个特征向量,如下面的方向梯度直方图所示,每个特征向量可以被放入这9个柱形中的其中一个,这样我们就将64的向量变换为9个值
四、总结
- HOG是一种特征描述可以运用在目标检测上
- HOG加上SVM分类器可以work well 在目标检测上
- HOG运用一种滑窗技术在一张图片上,并且HOG 特征描述是针对于每一固定位置(滑窗大小)来产生的
五、Python实际操作
- Python运行平台:Jupyter Notebook
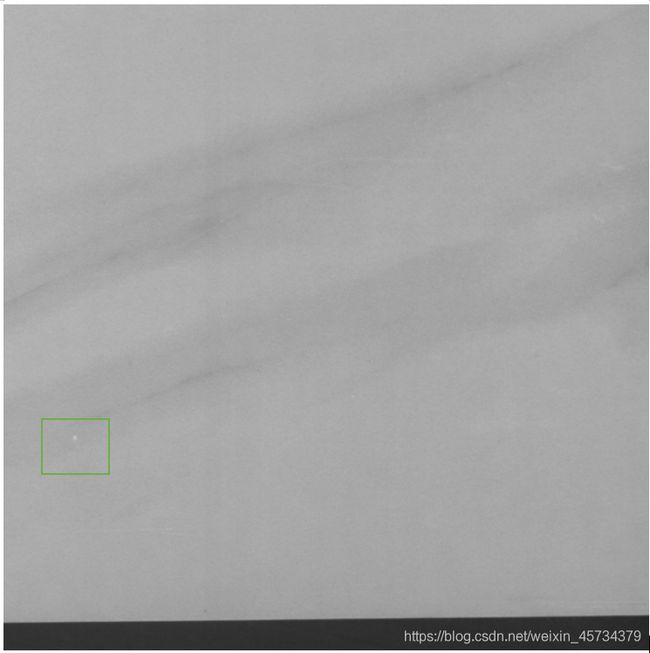
- 所运用的照片只有197_1_t20201119084916148_CAM1_18.jpg,可以随意替换
- 该图片像素为1333*1333,绿色框里表示一个白色瑕疵点,想查看白色瑕疵周围的HOG描述
import cv2
import numpy as np
import math
import matplotlib.pyplot as plt
class Hog_descriptor():
'''
HOG描述符的实现
'''
def __init__(self, img, cell_size=8, bin_size=9):
'''
构造函数
默认参数,一个block由2x2个cell组成,步长为1个cell大小
args:
img:输入图像(更准确的说是检测窗口),这里要求为灰度图像 对于行人检测图像大小一般为128x64 即是输入图像上的一小块裁切区域
cell_size:细胞单元的大小 如8,表示8x8个像素
bin_size:直方图的bin个数
'''
self.img = img
'''
采用Gamma校正法对输入图像进行颜色空间的标准化(归一化),目的是调节图像的对比度,降低图像局部
的阴影和光照变化所造成的影响,同时可以抑制噪音。采用的gamma值为0.5。 f(I)=I^γ
'''
self.img = np.sqrt(img*1.0 / float(np.max(img)))
self.img = self.img * 255
#print('img',self.img.dtype) #float64
#参数初始化
self.cell_size = cell_size
self.bin_size = bin_size
self.angle_unit = 180 / self.bin_size #这里采用180°
assert type(self.bin_size) == int, "bin_size should be integer,"
assert type(self.cell_size) == int, "cell_size should be integer,"
assert 180 % self.bin_size == 0, "bin_size should be divisible by 180"
def extract(self):
'''
计算图像的HOG描述符,以及HOG-image特征图
'''
height, width = self.img.shape
'''
1、计算图像每一个像素点的梯度幅值和角度
'''
gradient_magnitude, gradient_angle = self.global_gradient()
gradient_magnitude = abs(gradient_magnitude)
'''
2、计算输入图像的每个cell单元的梯度直方图,形成每个cell的descriptor 比如输入图像为128x64 可以得到16x8个cell,每个cell由9个bin组成
'''
cell_gradient_vector = np.zeros((int(height / self.cell_size), int(width / self.cell_size), self.bin_size))
#遍历每一行、每一列
for i in range(cell_gradient_vector.shape[0]):
for j in range(cell_gradient_vector.shape[1]):
#计算第[i][j]个cell的特征向量
cell_magnitude = gradient_magnitude[i * self.cell_size:(i + 1) * self.cell_size,
j * self.cell_size:(j + 1) * self.cell_size]
cell_angle = gradient_angle[i * self.cell_size:(i + 1) * self.cell_size,
j * self.cell_size:(j + 1) * self.cell_size]
cell_gradient_vector[i][j] = self.cell_gradient(cell_magnitude, cell_angle)
#将得到的每个cell的梯度方向直方图绘出,得到特征图
hog_image = self.render_gradient(np.zeros([height, width]), cell_gradient_vector)
'''
3、将2x2个cell组成一个block,一个block内所有cell的特征串联起来得到该block的HOG特征descriptor
将图像image内所有block的HOG特征descriptor串联起来得到该image(检测目标)的HOG特征descriptor,
这就是最终分类的特征向量
'''
hog_vector = []
#默认步长为一个cell大小,一个block由2x2个cell组成,遍历每一个block
for i in range(cell_gradient_vector.shape[0] - 1):
for j in range(cell_gradient_vector.shape[1] - 1):
#提取第[i][j]个block的特征向量
block_vector = []
block_vector.extend(cell_gradient_vector[i][j])
block_vector.extend(cell_gradient_vector[i][j + 1])
block_vector.extend(cell_gradient_vector[i + 1][j])
block_vector.extend(cell_gradient_vector[i + 1][j + 1])
'''块内归一化梯度直方图,去除光照、阴影等变化,增加鲁棒性'''
#计算l2范数
mag = lambda vector: math.sqrt(sum(i ** 2 for i in vector))
magnitude = mag(block_vector) + 1e-5
#归一化
if magnitude != 0:
normalize = lambda block_vector, magnitude: [element / magnitude for element in block_vector]
block_vector = normalize(block_vector, magnitude)
hog_vector.append(block_vector)
return np.asarray(hog_vector), hog_image
def global_gradient(self):
'''
分别计算图像沿x轴和y轴的梯度
'''
gradient_values_x = cv2.Sobel(self.img, cv2.CV_64F, 1, 0, ksize=5)
gradient_values_y = cv2.Sobel(self.img, cv2.CV_64F, 0, 1, ksize=5)
#计算梯度幅值 这个计算的是0.5*gradient_values_x + 0.5*gradient_values_y
#gradient_magnitude = cv2.addWeighted(gradient_values_x, 0.5, gradient_values_y, 0.5, 0)
#计算梯度方向
#gradient_angle = cv2.phase(gradient_values_x, gradient_values_y, angleInDegrees=True)
gradient_magnitude, gradient_angle = cv2.cartToPolar(gradient_values_x,gradient_values_y,angleInDegrees=True)
#角度大于180°的,减去180度
gradient_angle[gradient_angle>180.0] -= 180
#print('gradient',gradient_magnitude.shape,gradient_angle.shape,np.min(gradient_angle),np.max(gradient_angle))
return gradient_magnitude, gradient_angle
def cell_gradient(self, cell_magnitude, cell_angle):
'''
为每个细胞单元构建梯度方向直方图
args:
cell_magnitude:cell中每个像素点的梯度幅值
cell_angle:cell中每个像素点的梯度方向
return:
返回该cell对应的梯度直方图,长度为bin_size
'''
orientation_centers = [0] * self.bin_size
#遍历cell中的每一个像素点
for i in range(cell_magnitude.shape[0]):
for j in range(cell_magnitude.shape[1]):
#梯度幅值
gradient_strength = cell_magnitude[i][j]
#梯度方向
gradient_angle = cell_angle[i][j]
#双线性插值
min_angle, max_angle, weight = self.get_closest_bins(gradient_angle)
orientation_centers[min_angle] += (gradient_strength * (1 - weight))
orientation_centers[max_angle] += (gradient_strength *weight)
return orientation_centers
def get_closest_bins(self, gradient_angle):
'''
计算梯度方向gradient_angle位于哪一个bin中,这里采用的计算方式为双线性插值
具体参考:https://www.leiphone.com/news/201708/ZKsGd2JRKr766wEd.html
例如:当我们把180°划分为9个bin的时候,分别对应对应0,20,40,...160这些角度。
角度是10,副值是4,因为角度10介于0-20度的中间(正好一半),所以把幅值
一分为二地放到0和20两个bin里面去。
args:
gradient_angle:角度
return:
start,end,weight:起始bin索引,终止bin的索引,end索引对应bin所占权重
'''
idx = int(gradient_angle / self.angle_unit)
mod = gradient_angle % self.angle_unit
return idx % self.bin_size, (idx + 1) % self.bin_size, mod / self.angle_unit
def render_gradient(self, image, cell_gradient):
'''
将得到的每个cell的梯度方向直方图绘出,得到特征图
args:
image:画布,和输入图像一样大 [h,w]
cell_gradient:输入图像的每个cell单元的梯度直方图,形状为[h/cell_size,w/cell_size,bin_size]
return:
image:特征图
'''
cell_width = self.cell_size / 2
max_mag = np.array(cell_gradient).max()
#遍历每一个cell
for x in range(cell_gradient.shape[0]):
for y in range(cell_gradient.shape[1]):
#获取第[i][j]个cell的梯度直方图
cell_grad = cell_gradient[x][y]
#归一化
cell_grad /= max_mag
angle = 0
angle_gap = self.angle_unit
#遍历每一个bin区间
for magnitude in cell_grad:
#转换为弧度
angle_radian = math.radians(angle)
#计算起始坐标和终点坐标,长度为幅值(归一化),幅值越大、绘制的线条越长、越亮
x1 = int(x * self.cell_size + cell_width + magnitude * cell_width * math.cos(angle_radian))
y1 = int(y * self.cell_size + cell_width + magnitude * cell_width * math.sin(angle_radian))
x2 = int(x * self.cell_size + cell_width - magnitude * cell_width * math.cos(angle_radian))
y2 = int(y * self.cell_size + cell_width - magnitude * cell_width * math.sin(angle_radian))
cv2.line(image, (y1, x1), (y2, x2), int(255 * math.sqrt(magnitude)))
angle += angle_gap
return image
if __name__ == '__main__':
#加载图像
img = cv2.imread('F:/TTTianchi/Onepicture/segment/197_1_t20201119084916148_CAM1_18.jpg')
width = 133
height = 133 #有更改
img_copy = img[800:800+height,100:100+width][:,:,::-1] #看看白色瑕疵点大致位置
gray_copy = cv2.cvtColor(img_copy,cv2.COLOR_BGR2GRAY)
#显示原图像
plt.figure(figsize=(10,10))
plt.subplot(1,2,1)
plt.imshow(img_copy)
#HOG特征提取
hog = Hog_descriptor(gray_copy, cell_size=5, bin_size=9)
hog_vector, hog_image = hog.extract()
print('hog_vector',hog_vector.shape)
print('hog_image',hog_image.shape)
#绘制特征图
plt.subplot(1,2,2)
plt.imshow(hog_image, cmap=plt.cm.gray)
plt.show()
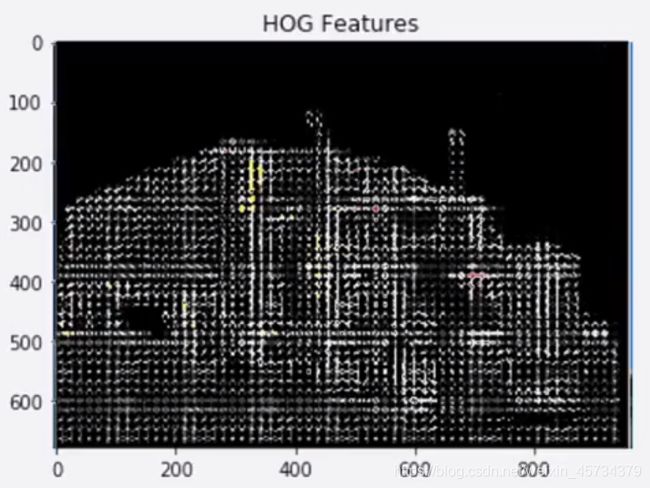
- 结果显示 白色瑕疵点的结构很容易在HOG图中看出——一团明显的白色
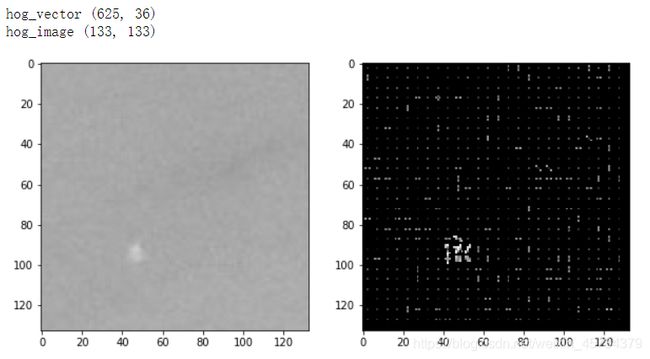
- 我们来计算加深对于HOG的印象
- 对于133x133的窗口,cell的大小为8x8,9个bin大小的直方图,block为2x2的cell,以1个cell为步长
- 水平、垂直方向有133/5-1=25.6,即25个扫描窗口,所以hog_vector为(25x25,2x2x9)
- 一共有25x25x2x2x9=22500个HOG特征