【opencv450-samples】图像配准 image_alignment.cpp
/*
* 本示例演示函数的使用
* findTransformECC 实现图像对齐ECC算法
*
*
* 演示加载图像(默认为 fruits.jpg),并根据给定的运动类型人工创建模板图像。
当给定两幅图像时,第一幅图像是输入图像,第二幅图像定义模板图像。
在后一种情况下,您还可以解析经纱的初始化。
输入和输出扭曲文件由原始扭曲(变换)元素组成
*
* 作者:G. Evangelidis,INRIA,格勒诺布尔,法国
* M. Asbach,Fraunhofer IAIS,德国圣奥古斯丁
*/平移运动:

欧式运动:euclidean
仿射运动:

透视扭曲运动:
源码:
/*
* This sample demonstrates the use of the function
* findTransformECC that implements the image alignment ECC algorithm
*
*
* The demo loads an image (defaults to fruits.jpg) and it artificially creates
* a template image based on the given motion type. When two images are given,
* the first image is the input image and the second one defines the template image.
* In the latter case, you can also parse the warp's initialization.
*
* Input and output warp files consist of the raw warp (transform) elements
*
* Authors: G. Evangelidis, INRIA, Grenoble, France
* M. Asbach, Fraunhofer IAIS, St. Augustin, Germany
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
static void help(const char** argv);
static int readWarp(string iFilename, Mat& warp, int motionType);
static int saveWarp(string fileName, const Mat& warp, int motionType);
static void draw_warped_roi(Mat& image, const int width, const int height, Mat& W);
#define HOMO_VECTOR(H, x, y)\
H.at(0,0) = (float)(x);\
H.at(1,0) = (float)(y);\
H.at(2,0) = 1.;
#define GET_HOMO_VALUES(X, x, y)\
(x) = static_cast (X.at(0,0)/X.at(2,0));\
(y) = static_cast (X.at(1,0)/X.at(2,0));
const std::string keys =
"{@inputImage | fruits.jpg | input image filename }"
"{@templateImage | | template image filename (optional)}"
"{@inputWarp | | input warp (matrix) filename (optional)}"
"{n numOfIter | 50 | ECC's iterations }"
"{e epsilon | 0.0001 | ECC's convergence epsilon }"
"{o outputWarp | outWarp.ecc | output warp (matrix) filename }"
"{m motionType | homography | type of motion (translation, euclidean, affine, homography) }"
"{v verbose | 1 | display initial and final images }"
"{w warpedImfile | warpedECC.png | warped input image }"
"{h help | | print help message }"
;
static void help(const char** argv)
{
cout << "\nThis file demonstrates the use of the ECC image alignment algorithm. When one image"
" is given, the template image is artificially formed by a random warp. When both images"
" are given, the initialization of the warp by command line parsing is possible. "
"If inputWarp is missing, the identity transformation initializes the algorithm. \n" << endl;
cout << "\nUsage example (one image): \n"
<< argv[0]
<< " fruits.jpg -o=outWarp.ecc "
"-m=euclidean -e=1e-6 -N=70 -v=1 \n" << endl;
cout << "\nUsage example (two images with initialization): \n"
<< argv[0]
<< " yourInput.png yourTemplate.png "
"yourInitialWarp.ecc -o=outWarp.ecc -m=homography -e=1e-6 -N=70 -v=1 -w=yourFinalImage.png \n" << endl;
}
//读取扭曲矩阵
static int readWarp(string iFilename, Mat& warp, int motionType) {
// it reads from file a specific number of raw values:
// 9 values for homography, 6 otherwise 它从文件中读取特定数量的原始值:单应性为 9 个值,否则为 6 个//
CV_Assert(warp.type() == CV_32FC1);
int numOfElements;
if (motionType == MOTION_HOMOGRAPHY)//运动类型
numOfElements = 9;
else
numOfElements = 6;
int i;
int ret_value;
ifstream myfile(iFilename.c_str());
if (myfile.is_open()) {
float* matPtr = warp.ptr(0);//获取扭曲矩阵指针
for (i = 0; i < numOfElements; i++) {
myfile >> matPtr[i];
}
ret_value = 1;
}
else {
cout << "Unable to open file " << iFilename.c_str() << endl;
ret_value = 0;
}
return ret_value;
}
//保存扭曲矩阵
static int saveWarp(string fileName, const Mat& warp, int motionType)
{
// it saves the raw matrix elements in a file
CV_Assert(warp.type() == CV_32FC1);
const float* matPtr = warp.ptr(0);//获取扭曲矩阵指针
int ret_value;//返回值: 1-保存成功
ofstream outfile(fileName.c_str());//输出文件流
if (!outfile) {
cerr << "error in saving "
<< "Couldn't open file '" << fileName.c_str() << "'!" << endl;
ret_value = 0;
}
else {//save the warp's elements 保存扭曲矩阵元素 https://www.jianshu.com/p/bb9c73b4a44b
outfile << matPtr[0] << " " << matPtr[1] << " " << matPtr[2] << endl; //空格隔开一行三个
outfile << matPtr[3] << " " << matPtr[4] << " " << matPtr[5] << endl;
if (motionType == MOTION_HOMOGRAPHY) { //运动类型 平移(MOTION_TRANSLATION) 欧氏(MOTION_EUCLIDEAN) 仿射(MOTION_AFFINE) 单应性(MOTION_HOMOGRAPHY)
outfile << matPtr[6] << " " << matPtr[7] << " " << matPtr[8] << endl;
}
ret_value = 1;
}
return ret_value;
}
//绘制扭曲的ROI 四边形边框
static void draw_warped_roi(Mat& image, const int width, const int height, Mat& W)
{
Point2f top_left, top_right, bottom_left, bottom_right;
//3x1矩阵
Mat H = Mat(3, 1, CV_32F);
Mat U = Mat(3, 1, CV_32F);
//变换矩阵
Mat warp_mat = Mat::eye(3, 3, CV_32F);
//赋值
for (int y = 0; y < W.rows; y++)
for (int x = 0; x < W.cols; x++)
warp_mat.at(y, x) = W.at(y, x);
//warp the corners of rectangle 扭曲矩形的角点
// top-left H: [1,1,1]
HOMO_VECTOR(H, 1, 1);
/** @brief 执行广义矩阵乘法。
函数 cv::gemm 执行类似于 BLAS 级别 3 中的 gemm 函数的广义矩阵乘法。例如,
`gemm(src1, src2, alpha, src3, beta, dst, GEMM_1_T + GEMM_3_T)`
对应于
\f[\texttt{dst} = \texttt{alpha} \cdot \texttt{src1} ^T \cdot \texttt{src2} + \texttt{beta} \cdot \texttt{src3} ^T\f]
如果是复数(双通道)数据,则执行复数矩阵乘法。
该函数可以替换为矩阵表达式。例如,上面的调用可以替换为:
@代码{.cpp}
dst = alpha*src1.t()*src2 + beta*src3.t();
@endcode
@param src1 首先相乘的输入矩阵可以是实数(CV_32FC1,CV_64FC1)或复数(CV_32FC2,CV_64FC2)。
@param src2 与 src1 相同类型的第二个相乘输入矩阵。
@param 矩阵乘积的 alpha 权重。
@param src3 添加到矩阵乘积的第三个可选增量矩阵;它应该与 src1 和 src2 具有相同的类型。
@param src3 的 beta 权重。
@param dst 输出矩阵;它具有适当的大小和与输入矩阵相同的类型。
@param flags 操作标志 (cv::GemmFlags)
@sa mulTransposed ,变换
*/
gemm(warp_mat, H, 1, 0, 0, U);
GET_HOMO_VALUES(U, top_left.x, top_left.y);
// top-right
HOMO_VECTOR(H, width, 1);
gemm(warp_mat, H, 1, 0, 0, U);
GET_HOMO_VALUES(U, top_right.x, top_right.y);
// bottom-left
HOMO_VECTOR(H, 1, height);
gemm(warp_mat, H, 1, 0, 0, U);
GET_HOMO_VALUES(U, bottom_left.x, bottom_left.y);
// bottom-right
HOMO_VECTOR(H, width, height);
gemm(warp_mat, H, 1, 0, 0, U);
GET_HOMO_VALUES(U, bottom_right.x, bottom_right.y);//单应性变换后的右下角点
// draw the warped perimeter 绘制弯曲的周长
line(image, top_left, top_right, Scalar(255));
line(image, top_right, bottom_right, Scalar(255));
line(image, bottom_right, bottom_left, Scalar(255));
line(image, bottom_left, top_left, Scalar(255));
}
//https://www.jianshu.com/p/bb9c73b4a44b
int main(const int argc, const char* argv[])
{
CommandLineParser parser(argc, argv, keys);
parser.about("ECC demo");
parser.printMessage();
help(argv);
string imgFile = parser.get(0);//场景图像路径
string tempImgFile = parser.get(1);//模板图像路径
string inWarpFile = parser.get(2);//输入的扭曲矩阵文件
int number_of_iterations = parser.get("n");//迭代次数
double termination_eps = parser.get("e");//终止精度
string warpType = parser.get("m");//运动变换类型
int verbose = parser.get("v");//是否输出cout内容
string finalWarp = parser.get("o");//最终的扭曲矩阵
string warpedImFile = parser.get("w");//扭曲的图像文件
if (!parser.check())
{
parser.printErrors();
return -1;
}
//运动变换类型
if (!(warpType == "translation" || warpType == "euclidean"
|| warpType == "affine" || warpType == "homography"))
{
cerr << "Invalid motion transformation" << endl;
return -1;
}
int mode_temp;
if (warpType == "translation")
mode_temp = MOTION_TRANSLATION;//平移(MOTION_TRANSLATION):图像可以被移位(x,y)来获得第二个图像,我们只需要估算两个参数x和y。
else if (warpType == "euclidean")
mode_temp = MOTION_EUCLIDEAN;//欧氏(MOTION_EUCLIDEAN):图像的旋转和移位版本。所以有三个参数x,y和角度。
else if (warpType == "affine")
mode_temp = MOTION_AFFINE;//仿射(MOTION_AFFINE):仿射变换是旋转、平移(移位)、缩放和剪切的组合,该变换有六个参数。当正方形经历仿射变换时,平行线保持平行,但是以直角相交的线不再保持正交。
else
mode_temp = MOTION_HOMOGRAPHY;//单应性(MOTION_HOMOGRAPHY):上述所有变换都是2D变换。它们不考虑3D效果。另一方面,单应性变换可以解释一些3D效果(但不是全部)。该变换有8个参数。使用单应性转换时的正方形可以更改为任何四边形。
Mat inputImage = imread(samples::findFile(imgFile), IMREAD_GRAYSCALE);//读取灰度空间图像
if (inputImage.empty())
{
cerr << "Unable to load the inputImage" << endl;
return -1;
}
Mat target_image;
Mat template_image;
if (tempImgFile != "") {
inputImage.copyTo(target_image);
template_image = imread(samples::findFile(tempImgFile), IMREAD_GRAYSCALE);//模板图像
if (template_image.empty()) {
cerr << "Unable to load the template image" << endl;
return -1;
}
}
else { //apply random warp to input image 对输入图像应用随机扭曲//
resize(inputImage, target_image, Size(216, 216), 0, 0, INTER_LINEAR_EXACT);//缩放原图
Mat warpGround;
RNG rng(getTickCount());
double angle;
switch (mode_temp) {//对原图缩放后进行随机变换 得到模板
case MOTION_TRANSLATION://平移运动
warpGround = (Mat_(2, 3) << 1, 0, (rng.uniform(10.f, 20.f)),
0, 1, (rng.uniform(10.f, 20.f)));//随机平移矩阵
warpAffine(target_image, template_image, warpGround,
Size(200, 200), INTER_LINEAR + WARP_INVERSE_MAP);//进行平移。
break;
case MOTION_EUCLIDEAN://欧式运动
angle = CV_PI / 30 + CV_PI * rng.uniform((double)-2.f, (double)2.f) / 180;
warpGround = (Mat_(2, 3) << cos(angle), -sin(angle), (rng.uniform(10.f, 20.f)),
sin(angle), cos(angle), (rng.uniform(10.f, 20.f)));//随机欧式变换矩阵
warpAffine(target_image, template_image, warpGround,
Size(200, 200), INTER_LINEAR + WARP_INVERSE_MAP);//平移+旋转
break;
case MOTION_AFFINE://仿射变换
warpGround = (Mat_(2, 3) << (1 - rng.uniform(-0.05f, 0.05f)),
(rng.uniform(-0.03f, 0.03f)), (rng.uniform(10.f, 20.f)),
(rng.uniform(-0.03f, 0.03f)), (1 - rng.uniform(-0.05f, 0.05f)),
(rng.uniform(10.f, 20.f)));//随机仿射变换矩阵
warpAffine(target_image, template_image, warpGround,
Size(200, 200), INTER_LINEAR + WARP_INVERSE_MAP);
break;
case MOTION_HOMOGRAPHY://单应性变换 透视变换 https://zhuanlan.zhihu.com/p/60482480
warpGround = (Mat_(3, 3) << (1 - rng.uniform(-0.05f, 0.05f)),
(rng.uniform(-0.03f, 0.03f)), (rng.uniform(10.f, 20.f)),
(rng.uniform(-0.03f, 0.03f)), (1 - rng.uniform(-0.05f, 0.05f)), (rng.uniform(10.f, 20.f)),
(rng.uniform(0.0001f, 0.0003f)), (rng.uniform(0.0001f, 0.0003f)), 1.f);//随机3x3单应性变换矩阵
warpPerspective(target_image, template_image, warpGround,
Size(200, 200), INTER_LINEAR + WARP_INVERSE_MAP);//透视变换: 随机扭曲原图得到模板图像
break;
}
}
/** @brief 对图像应用仿射变换。
CV_EXPORTS_W void warpAffine( InputArray src, OutputArray dst,
InputArray M, Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
函数 warpAffine 使用指定的矩阵变换源图像:
\f[\texttt{dst} (x,y) = \texttt{src} ( \texttt{M} _{11} x + \texttt{M} _{12} y + \texttt{M} _{13 }, \texttt{M} _{21} x + \texttt{M} _{22} y + \texttt{M} _{23})\f]
当设置标志 #WARP_INVERSE_MAP 时。否则,先用#invertAffineTransform 反转变换,然后代入上面的公式,而不是M。该函数不能就地操作。
@param src 输入图像。
@param dst 输出图像,其大小为 dsize 且类型与 src 相同。
@param M \f$2\times 3\f$ 变换矩阵。
@param dsize 输出图像的大小。
@param 标志插值方法的组合(请参阅#InterpolationFlags)和可选标志 #WARP_INVERSE_MAP,这意味着 M 是逆变换( \f$\texttt{dst}\rightarrow\texttt{src}\f$ )。
@param borderMode 像素外推方法(参见#BorderTypes);当borderMode=#BORDER_TRANSPARENT时,表示目标图像中与源图像中的“异常值”对应的像素未被函数修改。
@param borderValue 值在恒定边框的情况下使用;默认情况下,它是 0。
@sa warpPerspective,调整大小,重新映射,getRectSubPix,变换
*/
/** @example samples/cpp/warpPerspective_demo.cpp
示例程序显示使用 cv::getPerspectiveTransform 和 cv::warpPerspective 进行图像变形
*/
/** @brief 对图像应用透视变换。
CV_EXPORTS_W void warpPerspective( InputArray src, OutputArray dst,
InputArray M, Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
函数 warpPerspective 使用指定的矩阵变换源图像:
\f[\texttt{dst} (x,y) = \texttt{src} \left ( \frac{M_{11} x + M_{12} y + M_{13}}{M_{31} x + M_ {32} y + M_{33}} ,
\frac{M_{21} x + M_{22} y + M_{23}}{M_{31} x + M_{32} y + M_{33}} \right )\f]
当设置标志 #WARP_INVERSE_MAP 时。否则,先用 invert 反转变换,然后代入上面的公式,而不是 M。该函数不能就地操作。
@param src 输入图像。
@param dst 输出图像,其大小为 dsize 且类型与 src 相同。
@param M \f$3\times 3\f$ 变换矩阵。
@param dsize 输出图像的大小。
@param 标志插值方法(#INTER_LINEAR 或 #INTER_NEAREST)和可选标志 #WARP_INVERSE_MAP 的组合,它将 M 设置为逆变换(
\f$\texttt{dst}\rightarrow\texttt{src}\f$)。
@param borderMode 像素外推方法(#BORDER_CONSTANT 或 #BORDER_REPLICATE)。
@param borderValue 值在恒定边框的情况下使用;默认情况下,它等于 0。
@sa warpAffine,调整大小,重新映射,getRectSubPix,perspectiveTransform
*/
const int warp_mode = mode_temp; //变换模式
// 初始化或加载扭曲矩阵initialize or load the warp matrix
Mat warp_matrix;
if (warpType == "homography")
warp_matrix = Mat::eye(3, 3, CV_32F);//透视变换矩阵
else
warp_matrix = Mat::eye(2, 3, CV_32F);//仿射变换矩阵
if (inWarpFile != "") {
int readflag = readWarp(inWarpFile, warp_matrix, warp_mode);//扭曲矩阵文件
if ((!readflag) || warp_matrix.empty())
{
cerr << "-> Check warp initialization file" << endl << flush;
return -1;
}
}
else {
printf("\n ->Performance Warning: Identity warp ideally assumes images of "
"similar size. If the deformation is strong, the identity warp may not "
"be a good initialization. \n");
}
if (number_of_iterations > 200)
cout << "-> Warning: too many iterations " << endl;
if (warp_mode != MOTION_HOMOGRAPHY) //仿射变换矩阵2x3
warp_matrix.rows = 2;
// start timing
const double tic_init = (double)getTickCount();//开始计时
double cc = findTransformECC(template_image, target_image, warp_matrix, warp_mode,
TermCriteria(TermCriteria::COUNT + TermCriteria::EPS,
number_of_iterations, termination_eps));//计算模板图像与原图像的 扭曲变换矩阵
if (cc == -1)
{//执行中断 检查扭曲矩阵初始化 以及 图像尺寸
cerr << "The execution was interrupted. The correlation value is going to be minimized." << endl;
cerr << "Check the warp initialization and/or the size of images." << endl << flush;
}
// end timing
const double toc_final = (double)getTickCount();//结束计时
const double total_time = (toc_final - tic_init) / (getTickFrequency());//总时间
if (verbose) {
cout << "Alignment time (" << warpType << " transformation): "
<< total_time << " sec" << endl << flush;//
// cout << "Final correlation: " << cc << endl << flush;
}
// 保存最终的扭曲矩阵save the final warp matrix
saveWarp(finalWarp, warp_matrix, warp_mode);
if (verbose) {
cout << "\nThe final warp has been saved in the file: " << finalWarp << endl << flush;
}
//保存最终扭曲的图像 save the final warped image
Mat warped_image = Mat(template_image.rows, template_image.cols, CV_32FC1);
if (warp_mode != MOTION_HOMOGRAPHY)//仿射变换
warpAffine(target_image, warped_image, warp_matrix, warped_image.size(),
INTER_LINEAR + WARP_INVERSE_MAP);
else//透视变换
warpPerspective(target_image, warped_image, warp_matrix, warped_image.size(),
INTER_LINEAR + WARP_INVERSE_MAP);//利用计算的扭曲矩阵 扭曲源图像 得到warped_image扭曲后的图像
//save the warped image
imwrite(warpedImFile, warped_image);
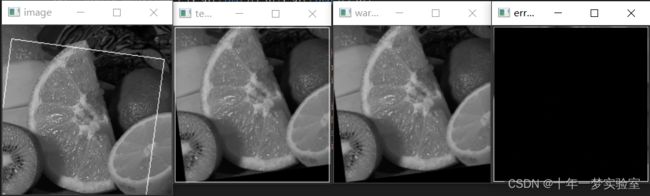
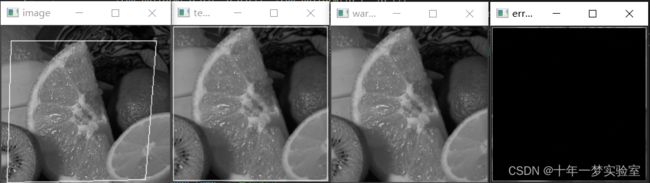
// display resulting images
if (verbose)
{
cout << "The warped image has been saved in the file: " << warpedImFile << endl << flush;
namedWindow("image", WINDOW_AUTOSIZE);
namedWindow("template", WINDOW_AUTOSIZE);
namedWindow("warped image", WINDOW_AUTOSIZE);
namedWindow("error (black: no error)", WINDOW_AUTOSIZE);
moveWindow("image", 20, 300);
moveWindow("template", 300, 300);
moveWindow("warped image", 600, 300);
moveWindow("error (black: no error)", 900, 300);
// draw boundaries of corresponding regions
Mat identity_matrix = Mat::eye(3, 3, CV_32F);//单位矩阵
draw_warped_roi(target_image, template_image.cols - 2, template_image.rows - 2, warp_matrix);//绘制扭曲的周边(四条边)
draw_warped_roi(template_image, template_image.cols - 2, template_image.rows - 2, identity_matrix);//绘制模板图像的周边
Mat errorImage;
subtract(template_image, warped_image, errorImage);//模板图像与扭曲后的图像相减
double max_of_error;
minMaxLoc(errorImage, NULL, &max_of_error);//最大误差像素点
// show images
cout << "Press any key to exit the demo (you might need to click on the images before)." << endl << flush;
imshow("image", target_image);//显示目标图像
waitKey(200);
imshow("template", template_image);//显示模板图像
waitKey(200);
imshow("warped image", warped_image);//显示扭曲的图像
waitKey(200);
imshow("error (black: no error)", abs(errorImage) * 255 / max_of_error);//误差图像灰度化
waitKey(0);
}
// done
return 0;
}