关于ADAS高级驾驶辅助系统概述
关于ADAS高级驾驶辅助系统概述
自动驾驶和高级辅助驾驶一直是汽车发展上避不开的话题和方向,而ADAS也一直是汽车电子方向的招聘岗位,现在有很多企业明确定义职位是ADAS开发/测试工程师,可见,现在在汽车发展方向,自动驾驶的位置是不可代替的,也是必然的发展趋势。下面我们对ADAS做具体阐述:
ADAS: ( Advanced Driving Assistance System) 即高级驾驶辅助系统,目前市面上把它分为17种子系统。 大部分属于L3级别。是一种利用安装于车上的各式各样的传感器, 在第一时间收集车内外的环境数据, 进行静、动态物体的辨识、侦测与追踪等技术上的处理, 从而能够让驾驶者在最快的时间察觉可能发生的危险, 以引起注意和提高安全性的主动安全技术。
ADAS系统通常包括自适应巡航ACC(Adaptive cruise control)、车道偏移报警系统LDWS( Lane departure warning system)、车道保持系统LKA(Lane keep assistance),碰撞避免或预碰撞系统CAS(Collision avoidance system或Pre crash system)、夜视系统NV(Night Vision system)、自适应灯光控制ALC(Adaptive light control)、行人保护系统PPS(Pedestrian protection system)、自动泊车系统AP(Automatic parking)、交通标志识别TSR(Traffic sign recognition)、盲点探测BSD( Blind spot detection) ,驾驶员疲劳探测DDD(Driver drowsiness detection)、下坡控制系统HDC(Hill descent control)和电动汽车报警EVWS(Electric vehicle warning sounds)系统等。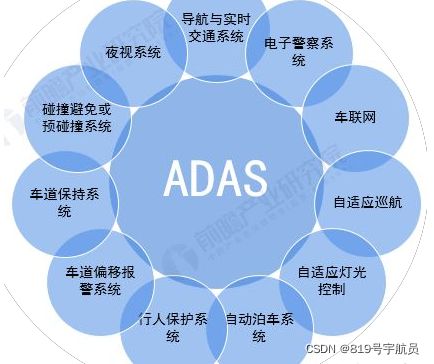
下面分别说明它的每一部分:
-
导航系统(Guidance System)主要功能是定位、目的地选择、路径计算和路径指导。硬件主要有:芯片、天线、处理器、内存、显示屏、扬声器、按键、扩展功能插槽等组成。里面的数据储存在CDROM(小型光盘,只读存储,写入数据一次,信息将永久保存在光碟上,使用时通过光碟驱动器读出信息)上。特点就是防盗。这是目前市面上绝大多数汽车的基本配置之一。
-
实时交通系统(Traffic MessageChannel):简称TMC,属于GPS导航的辅助系统,同时也是导航系统应用的延伸。通过导航天线的位置数据发出,RDS进行远程数据处理,结合服务器终端数据采集信息分析出最佳、最快捷的驾驶路线,进行信息接收、解码并传递给驾驶者的一种交通导航技术。
目前全球只有三种,一个是美国的TravTek;一个是日本的VICS系统,以及欧洲的RDS-TMC系统。由于我国相关技术起步较晚,但是现阶段采用的智能交通系统(ITS)里面就涵盖了实时交通系统这一块。特点:提升道路通行效率,减少城市拥堵,提升驾驶者出行效率。功能:不管身处何地,只要天线信号接收良好,就能准确判断前方道路实时情况。为出行节约了大量的时间。 -
电子警察系统ISA (Intelligent speed adaptation或intelligent speed advice:车载电子警察系统的功能跟道路上的电子警察系统是配套使用的,道路上安装的那些电子警察系统(俗称电子眼)主要是为了迅速地监控、抓拍、地获取违章证据,对处理交通违章提供行之有效的监测手段。
我国在2005年底成功开发出具有自主知识产权的AG—400网警相机电子警察系统AG—400IC《车辆闯红灯自动记录系统》,AG-400IB《人像自动抓拍系》,AG-400IS《高清车辆超速抓拍系统》,AG-400IG《卡口抓拍系统》都属于国内技术水平比较高的电子警察系统设备。
车载电子警察系统主要是采集了大量装有电子警察系统的道路设备数据,当车辆驾驶人到达该路段之前都会提前告知驾驶人注意相关违规违章驾驶行为,避免不必要的驾驶分值损耗和经济及人身财产安全损失。
延伸:目前国内道路上的电子警察系统的车辆捕获率高达100%,识别车牌时间约1秒,车牌识别率白天95%以上,晚上90%以上。适用车速5-180Km/h. -
车联网(Vehicular communication systems):现阶段的车联网还是依托射频识别(radio frequence identification,RFID)技术、传感网络技术、卫星定位技术、无线通信技术、大数据分析技术等实现车与X【即车与云平台(一般通过卫星无线通信或移动蜂窝进行信息传输,指令下达,数据共享)、车(实现车辆位置、行驶速度、车流密度的信息交流与数据共享)、人(通过应用设备的Wi-Fi、蓝牙、蜂窝对车辆实时监控)、路(借助道路固定通信设施进行路况监测,路径选择)、】之间的网络连接。具有降低道路事故率,提升道路运输效率,保障车辆人员安全的特点。车内的OBD和CAN总线大家应该都有所耳闻。包括USB插孔,无线蓝牙连接都是车联网的最佳切入口,部分中配车辆早就可以通过手机监测控制车辆部分情况,如车窗忘记关了,等都可以通过电子设备联网操作。
-
自适应巡航ACC(Adaptive cruise control):巡航又分成定速巡航和自适应巡航。定速巡航非常好理解,就是在路况较好路段(高速或车少)设置一个速度值(如80kmh),按照这个速度作为基础进行操作(加速、快加、减速、快减),一般通过踩刹车就可以退出这个模式。
自适应巡航相对来说智能一些,一般都是低速情况使用,通过雷达,超声波测距传感器,红外测距传感器等判断车距、当前速度,发送到ECU(相当于车载电脑)判断计算之后,向节气门、制动、挡位发出指令进行合适的速度调节,特别是在长途情况或者疲劳情况,这个功能特适用。

- 车道偏移报警系统LDWS( Lane departure warning system) 在车辆发生无意识偏离车道时通过声音警报、闪光和方向盘振动等方式提醒驾驶员减少汽车因车道偏离而发生交通事故的系统,在驾驶员无意识偏离原车道时,发出警报。主要HUD抬头显示器(把时速、导航等数据投影到挡风玻璃上的一种智能仪表盘,不低头不转头;抬头即可看)摄像头、控制器以及传感器组成。
工作原理:当该系统开启时,摄像头(一般安置在车身侧面或后视镜位置)会时刻采集行驶路面车道的标识线,通过图像处理获得汽车在当前车道中的位置参数,当检测到汽车偏离车道时,传感器会及时收集车辆数据和驾驶员的操作状态,之后由控制器发出警报信号,整个过程大约在0.5秒完成,为驾驶者提供更多的反应时间。而如果驾驶者打开转向灯,正常进行变线行驶,那么车道偏离预警系统不会做出任何提示。该系统打开情况下,如果车辆转向灯打开,车辆跨过车道线,该系统的警报提示会自动屏蔽。

- 车道保持系统(Lane keeping assist system)它是在车道偏离预警系统(LDWS)的基础上对转向系统进行控制辅助车辆保持在本车道内行驶的辅助执行系统。当系统发现车辆已经偏离车道中心时会自动修正,微调方向盘,使得汽车保持在自己的车道内行驶。当车速达到65km/h或以上时速该系统才会开始运行。
车道偏离预警系统和车道保持系统是相辅相成的关系,一个负责预警提示,一个负责具体执行。业界称为“防出轨神器”。

- **碰撞避免或预碰撞系统(Collision Avoidance System或Precrash System)**关于此系统,也是由预警系统和执行系统构成,但是它又被分为前方碰撞预警和侧方碰撞预警。当然市面上大部分车还只是有预警系统,预警系统是在车距检测及警告HMW(Headway Monitoring & Warning )系统的基础上的技术延伸。车距检测及警告HMW(车祸的发生,大都是来不及反应,或无告警。而FCW能在碰撞前2-3秒,给出警告,以避免车祸发生。因此,FCW要检测出前方车辆或行人的距离及相对速度)。
主要是由中央处理器,减速制动装置,报警装置,传感器,显示界面等组成,传感器方面不同的车型使用的雷达有所不同,较普遍的是超声波雷达,激光雷达,毫米波雷达,单目、双目等(关于各种雷达方面后期会进行专期讲解)。当该系统检测到车辆前方有行人或者障碍物时通过算法进行相应的预警提示车辆驾驶人,倘若车辆驾驶人并没有做出响应系统会自动减速或者自动紧急制动的,有的车型分为两个步骤,有的分为三个。

- 夜视系统(Night Vision system)是利用红外线技术能将黑暗变得如同白昼,使驾驶员在黑夜里看得更远更清楚。夜视系统的结构由2部分组成:一部分是红外线摄像机,另一部分是挡风玻璃上的光显示系统。主要依赖近红外线传感器和远红外线传感器。当车辆在黑夜行驶时车辆驾驶人的视线能够像白昼一样清晰,就像戴了一副夜视仪。
- 自适应前照灯系统(adaptive front-lighting systerm,AFS)是使近光灯光轴在水平方向上与转向盘转角联动进行左右转动,在垂直方向上与车高联动进行上下摆动的灯光随动系统。主要是由传感器、ecu、车灯控制系统和前照灯组成,可以根据道路模式切换不同的光照模式,如高速道路,乡村道路,恶劣天气,旅游模式等。不同的光照模式有不同的视线角度。让车灯像人的眼球一样可以自由调节。

- 行人保护系统(Pedestrian protection system)
对于最基本的行人保护技术,主要涉及车身吸能材料的应用,如吸能保险杠、软性的引擎盖材料、大灯及附件无锐角等。其中,在发动机舱盖段面上采用缓冲结构设计,则是国内汽车厂商较为常见的做法。
利用引擎盖弹升技术,使发动机在汽车发生碰撞时瞬间鼓起,使人体不是碰撞在坚硬车壳上,而是碰撞在柔性与圆滑的表面上。在检测到撞人之后,车辆就会自动启动发动机盖弹升控制模块,车内配备的弹射装置便可瞬间将发动机罩提高,相当于在人落下时在下面垫了气垫。
- 自动泊车系统(Automatic parking) 自动泊车系统就是不用人工干预,自动停车入位的系统。可以使汽车自动地以正确的停靠位泊车,该系统包括一个环境数据采集系统、一个中央处理器和一个车辆策略控制系统。上述的环境数据采集系统一般包括图像采集系统和车载距离探测系统(通过超声波雷达或者毫米波雷达系统)

市面上已量产的泊车辅助系统主要有三类。最为常见的第一代叫做APA自动泊车,后来出现与手机结合使用的第二代叫RPA远程遥控泊车,最后是较为先进的第三代叫做自学习泊车。在不远的未来将会出现更为先进的泊车解决方案——AVP代客泊车,也就是还没有量产的第四代泊车辅助系统。
不同的自动泊车系统采用不同的配置来检测汽车周围的物体,有些在汽车前后保险杠四周装上了感应器,既可以当做发送器,又可以当做接收器。这些感应器会发送信号,当信号碰到车身周边的障碍物时会反射回来。然后,车上的计算机会利用其接收信号需要的时间确定障碍物的具体位置。
一些系统则使用安装在保险杠上的摄像头或雷达来检测障碍物。但最终结果都是一样的,汽车会检测到已停好的车辆、停车位的大小以及与路边的距离,然后自动驶入停车位。不过环境条件对车位测量和停车入位过程有一定的影响,例如树叶、废弃物或者冰雪盖住路沿时,驻车转向辅助系统可能很难识别路沿。
在汽车智能化的浪潮中,车载传感器发展迅速,越来越多搭载了先进传感器的汽车进入了我们的视野。比如能够在高速公路上实现单车道巡航的凯迪拉克CT6,以及交通严重拥堵时解放驾驶员时间的奥迪A8,以及能够轻松实现高速公路自动驾驶、上下匝道的特斯拉Model系列的车型。
大众对自动驾驶的认识主要集中在高速、环路,解决的是“开车”的问题。其实自动驾驶技术除了能开得一手好车外,还可以帮助解决新老司机都比较头痛的停车问题。泊车辅助系统目前已经发展至第三代,从最开始的驾驶员必须在车内配合挂挡完成泊车,发展到驾驶员可以站在车外5米使用手机控制泊车,最后到汽车自己学习泊车路线,完成固定停车位或自家车库的泊车。
下面,我就来盘点一下已经成熟的这三代泊车辅助系统的传感器配置以及典型的应用场景,随后我会对将在一两年内量产的第四代泊车辅助系统做一个简单说明。
泊车辅助一代:APA自动泊车APA(Auto Parking Asist)
自动泊车是生活中最常见的泊车辅助系统。泊车辅助系统在汽车低速巡航时,使用超声波雷达感知周围环境,帮助驾驶员找到尺寸合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位。
APA自动泊车所以依赖的传感器并不复杂,包括8个安装于汽车前、后的UPA超声波雷达,也就是大家常说的“倒车雷达”,和4个安装于汽车两侧的APA超声波雷达
APA超声波雷达的探测范围远而窄,常见APA最远探测距离为5米;UPA超声波雷达的探测范围近而宽,常见的UPA探测距离为3米。不同的探测范围决定了他们不同的分工。
APA超声波雷达的作用是在汽车低速巡航时,完成空库位的寻找和校验工作。如下所示,随着汽车低速行驶过空库位,安装在前侧方的APA超声波雷达的探测距离有一个先变小,再变大,再变小的过程。一旦汽车控制器探测到这个过程,可以根据车速等信息得到库位的宽度以及是否是空库位的信息。后侧方的APA在汽车低速巡航时也会探测到类似的信息,可根据这些信息对空库位进行校验,避免误检。
使用APA超声波雷达检测到空库位后,汽车控制器会根据本车的尺寸和车位的大小,规划出一条合理的泊车轨迹,控制方向盘、变速箱和油门踏板进行自动泊车。在泊车过程中,安装在汽车前后的8个UPA会实时感知环境信息,实时修正泊车轨迹,避免碰撞。
泊车辅助二代:RPA远程遥控泊车 RPA(Remote Parking Asist)远程遥控泊车辅助系统是在APA自动泊车技术的基础之上发展而来的,车载传感器的配置方案与第一代类似。它的诞生解决了停车后难以打开自车车门的尴尬场景,比如在两边都停了车的车位,或在比较狭窄的停车房。RPA远程遥控泊车辅助系统常见于特斯拉、宝马7系、奥迪A8等高端车型中。
泊车辅助三代:自学习泊车
在汽车变得越来越聪明后,驾驶员的期望也越来越高。他们希望在大雨天下班时,不用自己冒雨取车,而是用手机发送指令后,汽车能自己启动,泊出车位,并行驶到他们面前。
市面上的很多高配车型上配备的360°全景影像功能,就是基于以上原理拼接而成的“鸟瞰图”。为了给驾驶员提供更好地泊车体验,工程师在鸟瞰图的基础上做了更多文章,做出了“上帝视角”,我们可以称之为“真·360°高清全景影像系统”,配合车上的大屏使用,效果更佳。如下图所示:
自学习泊车辅助系统的核心技术——SLAM(Simultaneous Localization And
Mapping,即时定位与地图构建)。SLAM最早应用于军事领域,随后是机器人领域,近两年才被广泛应用到汽车领域。我将用一个非常简单的例子让大家了解SLAM技术。
基于相机实现的SLAM技术,被称为视觉SLAM。视觉SLAM需要从图像中提取特征信息,再配合视觉里程计的技术建立地图,但基本原理与上述例子大同小异。
自学习泊车的学习过程
驾驶员在准备停车前,可以在库位不远处,开启“路线学习”功能,随后慢慢将汽车泊入固定车位,系统就会自学习该段行驶和泊车路线。泊车路线一旦学习成功,车辆便可达到“过目不忘”。
泊车辅助四代:AVP自动代客泊车
AVP(Automated Valet Parking)自动代客泊车的研发就是为了解决日常工作、生活中停车难的痛点,其主要的应用地点通常是办公楼或者大型商场的地上或地下停车场。
在5G、传感器技术、基础设施愈发成熟的未来,汽车将会更加智能。在不远的未来,随着自动驾驶技术和国家交通方面法律法规的不断完善,过年回家、长途出差将不再是舟车劳顿,因为我们完全可以把驾驶权移交给车辆,我们在车上可以睡觉,看书,玩手机等。
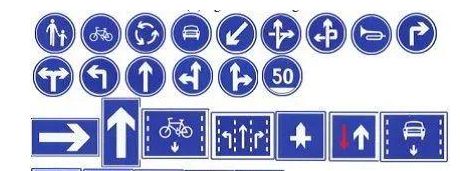
- 道路交通标志识别系统(Traffic sign
recognition)可以自动识别车辆行驶过程中交通路段的所有交通标志并向驾驶员发出提示信息。不管是指示标志、警告标志、禁令标志还是指路标志都可以识别。
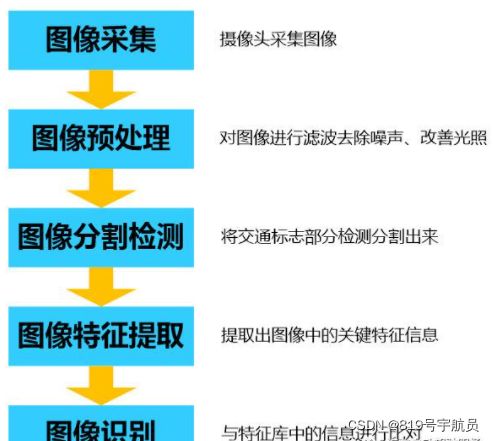
采用深度神经网络LeNet架构处理图像,实现交通标志识别。具体处理过程包括:
数据导入
图像采集
图像预处理
图像分割检测
图像特征提取
图像识别
- 盲点监测系统( Blind spot monitoring system)
盲点监测系统又叫并线辅助系统,英文简称BSM或者BLIS,有的叫盲点探测系统。是汽车上的一款安全类的高科技配置,主要功能是扫除后视镜盲区,通过微波雷达探测车辆两侧的后视镜盲区中的超车车辆,对驾驶者以提醒,从而避免在变道过程中由于后视镜盲区而发生事故。上市的很多车型都有盲区监测的功能配置。
由于汽车后视镜存在视觉盲区,变道之前就看不到盲区的车辆,如果盲区内有超车车辆,此时变道就会发生碰撞事故。在大雨天气、大雾天气、夜间光线昏暗,更加难以看清后方车辆,此时变道就面临更大的危险,盲点监测系统就是为了解决后视镜的盲区而产生的。
通过在汽车后保险杠内安装两个24GHz雷达传感器,在车辆行驶速度大于10KM/H自动启动,实时向左右3米后方15米范围,发出探测微波信号,系统对反射回的微波信号进行分析处理,即可知后面车辆距离,速度和运动方向等信息,通过系统算法,排除固定物体和远离的物体,当探测到盲区内有车辆靠近时,指示灯闪烁,此时驾驶员看不到盲区内的车辆,但是也能通过指示灯知道后方有车辆驶来,变道有碰撞的危险,如果此时驾驶员仍然没有注意到指示灯闪烁,打了转向灯,准备变道,那么系统就会发出哔哔哔的语音警报声,再次提醒驾驶员此时变道有危险,不宜变道。通过整个行车过程中,不间断地探测和提醒,防止行车过程中因恶劣天气,驾驶员疏忽,后视镜盲区,新手上路等潜在危险而造成交通安全事故。 - 驾驶疲劳预警系统(Driver Fatigue Monitor System)
是一种基于驾驶员生理反应特征的驾驶人疲劳监测预警产品,全世界只有美国的Attention
Technologies公司推出的DD850,瑞典的SmartEye公司推出的AntiSleep系统已经商用,奔驰、沃尔沃的高端车系以及日本丰田公司在日本销售的13代皇冠也都标配瞌睡报警系统。
工作原理就是通过视觉传感器对人的眼睑眼球的几何特征和动作特征、眼睛的凝视角度及其动态变化、头部位置和方向的变化等进行实时检测和测量,建立驾驶人眼部头部特征与疲劳状态的关系模型,研究疲劳状态的多参量综合描述方法;同时研究多元信息的快速融合方法,提高疲劳检测的可靠性和准确性,从而研制稳定可靠的驾驶员疲劳监测系统。它检测的方法很多,比如:人脸快速检测方法、疲劳程度检测方法、疲劳驾驶问题检测等等。
- 下坡辅助系统(Down-hill assist control)简称DAC DAC下坡行车辅助控制系统(Down-hill assist
control)与发动机制动的道理相同,为了避免制动系统负荷过大,减轻驾驶员负担,下山辅助控制在分动器位于L位置;车速5-25km/h并打开DAC开关的条件下,不踩加速踏板和制动踏板,下山辅助控制系统可以自动把车速控制在适当水平。下山辅助控制系统工作时停车灯会自动点亮。
DAC系统的出现能使车辆以恒定低速行驶,防止车轮锁死,同时可以大大降低车辆在坑洼路面下坡时产生的震动,从而确保了行驶的稳定性与提高驾乘舒适性。 - 汽车防盗系统(Car Security System) 是指防止汽车本身或车上的物品被盗所设的系统。它由电子控制的遥控器或钥匙、电子控制电路、报警装置和执行机构等组成。最早的汽车门锁是机械式门锁,只是用于汽车行驶时防止车门自动打开而发生意外,只起行车安全作用,不起防盗作用。随着社会的进步、科学技术的发展和汽车保有量的不断增加,后来制造的轿车、货车车门都上装了带钥匙的门锁。这种门锁只控制一个车门,其他车门是靠车内门上的门锁按钮进行开启或锁止。
汽车防盗系统是通过设备防止车辆本身或者车内部的物品被盗的一种系统。最早的一些防盗系统是由机械组成,就是我们常常看到的防盗锁。而随着科技的发展,防盗配件逐步地转向电子化,如遥控器、蓝牙感应器等。当下更多的汽车防盗系统不仅仅只限制防盗,还有带上汽车定位的功能,以防被盗后定位找回。
常见的汽车防盗系统一般分为机械式和电子式两大类。
1、机械式——机械式是市面上最早,也是最简单的一种汽车防盗装置。其优点是价格便宜,安装简单;缺点就是防盗不彻底,拆装麻烦,体积大占用空间等。下面的这些机械式比较常见:
转向盘锁:这是大家最为熟悉的防盗装置,也被车主称作"拐杖锁"。以坚固的金属结构锁住汽车操纵部分,使车辆无法行驶。
车轮锁:车轮锁是一种车外的防盗装置,它可以牢固地锁住汽车轮胎,使车轮无法转动来防止车辆被盗。
可拆卸方向盘:顾名思义,就是将方向盘取下,然后把防盗装置的锁帽盖套在转轴上。可就是说即使小偷自带方向盘来偷车也不能用。
离合刹车锁防盗:这是一种将离合或者是制动板锁住并支撑稳,使小偷无法操控而防止车辆被盗。
排挡锁:这是车主们最爱的一种机械式防盗装置,因为此防盗系统简便又坚固,采用特殊高硬度合金钢制造,防撬、防钻、防锯,且独特采用同材质镍银合金锁芯和钥匙,没有原厂配备钥匙,绝无法打开,钥匙丢失后,可使用原厂电脑卡复制钥匙。
2、电子式——这是当下市面上使用最广的一种防盗装置,这种装置优点就是安装方便,有些甚至免安装、体积小隐蔽性强、自动报警、自动设防撤防、定位寻车功能,就以一动网GPS系列为例,它具备以下的功能;
不用安装:操作方便,搁置在车内任何位置都可以。免安装版的优势就在于减少拆线安装可能引发的断油断电等的隐患;
开门即报警:只要车门和后备箱被打开,终端设备立即打警报电话和发送手机信息给车主。在最快的时间里将事故发生率降到最低。相对于传统的汽车定位器而言。唯有汽车开出安全围栏后才会发出报警消息;
自动布撤防:熄火泊车后,当蓝牙感应器相隔汽车约10-20米内自动进入设防状态。若是汽车出现震动,设备即速给车主发出报警信号;
超长待机时间:电池容量50000毫安,一动网CBB-100G2最长待机时间可以达3年之久;
微信平台:应用成熟的微信平台,更加节省手机的内存并保证信息安全。减少了传统的汽车定位器需要安装APP,注册后才能使用等繁琐且毫无信息保护的流程;
查询历史轨迹:回放60天内的行驶轨迹,包含当时的车速、方向、停留时间等信息,也可以根据需要关掉行驶轨迹,让个人隐私得到更好的保护;
精准定位:采用双向定位——GPS和GSM,空旷环境下GPS定位精准度为2米左右。GSM(基站定位系统)模式下,精准度在20-100米之间;
以上就是ADAS的概述,后期有补充随时更新~☺