2021机械组培训
**NBUT 大一培训体系**
编写:20机械组 程云龙 起稿时间:2021-11.3
如果觉得网页的md渲染器不好 可以找我要源代码
查看更新日志点这里
目录
文章目录
- 目录
-
- 一、软件学习
-
- 1.1 solid works零件学习(2018版本)
- 1.2 装配体自学
- 二、标准件认识
-
- 2.1 MISUMI
- 2.2 螺丝
-
- 2.2.1 十字螺丝
- 2.2.2 内六角螺丝
-
- 2.2.3 普通螺丝
- 2.2.4 平头螺丝
-
- 2.2.4.1 图示
- 2.2.4.2 用途
- 2.3 螺母
-
- 2.3.1 普通六角螺母
- 2.3.2 防松螺母
-
- 2.3.2.1 原理
- 2.3.2.2 特点
- 2.3.3 法兰螺母
- 2.4 垫片
-
- 2.4.1 普通垫片
- 2.4.2 弹簧垫片
- 2.4.3 双叠自锁垫片
- 2.5 轴承
-
- 2.5.1 轴向力和径向力
- 2.5.2 常用轴承介绍
-
- 2.5.2.1 法兰轴承
-
- 2.5.2.1.1图片展示
- 2.5.2.1.2特性
- 2.5.2.2 平面推力球轴承
-
- 2.5.2.2.1 图片展示
- 2.5.2.2.2 特性
- 2.5.2.3 深沟球轴承
-
- 2.5.2.3.1图片展示
- 2.5.2.3.2 特性
- 2.5.2.4 交叉滚子轴承
-
- 2.5.2.4.1 图片展示
- 2.5.2.4.2 特性
- 2.5.2.4.3 注意事项
- 2.5.2.5 角接触轴承
-
- 2.5.2.5.1 图片展示
- 2.5.2.5.2 特性
- 2.6 铜柱铝柱
- 三、官方物资的认识(主要电控方面)
-
- 3.1 输入系统
-
- 3.1.1 EoboMaster UWB 定位系统
-
- 3.1.2 图片展示
- 3.1.3 介绍
- 3.2 输出系统(大部分电机都需要配合电调一同使用)
-
- 3.2.1RboMsater GM6020
-
- 3.2.1.1 展示图片
- 3.2.1.2 特点
- 3.2.1.3技术参数
- 3.2.1.4 通常用途
- 3.2.2 RoboMaster M3508 减速直流电机
-
- 3.2.2.1 展示图片
- 3.2.2.2 特点
- 3.2.2.3 技术参数
- 3.2.2.4 通常用途
- 3.2.3 RoboMaster M2006 P36直流无刷减速电机
-
- 3.2.3.1 展示图片
- 3.2.3.2 特点
- 3.2.3.3 技术参数
- 3.2.3.4 通常用途
- 3.3 控制核心(机械组简单掌握尺寸即放置位置即可)
-
- 3.3.1 RoboMaster开发板C型(基本为主要使用的控制板)
-
- 3.3.1.1 展示图片
- 3.3.1.2 特点
- 3.3.2 RoboMaster开发板A型(19 20年使用 之后应该很少使用)
-
- 3.3.2.1 展示图片
- 3.3.2.2 尺寸信息
- 3.3.2.3 特点
- 3.4 裁判系统 只讲解注意点(详情自行阅读机器人制作规范)
-
- 3.4.1 灯条模块
- 3.4.2 装甲板模块
- 3.4.3 主控模块
- 3.4.4 电源管理模块
- 3.4.5 场地交换模块(只有地面机器人需要)
- 3.4.6 测速模块
- 3.4.7 相机图传模块
- 3.4.8 超级电容管理模块
- 3.5 其他配件
-
- 3.5.1 RoboMaster 17mm荧光弹丸充能装置
-
- 3.5.1.1 展示图片
- 3.5.1.2 介绍
- 四、导出工程图
-
- 4.1 solid works将板材类零件图转换成工程图
-
- 4.1.1 步骤(加粗的一定一定一定要注意)
- 4.2 solid works将管材类零件图转换成工程图
- 五、3D打印
-
- 5.1 3D打印机和材料的分类(不附带图片展示 请自行百度)
-
- 5.1.1 FDM 3D打印机
-
- 5.1.1.1 原理
- 5.1.1.2 材料
- 5.1.1.3 特性
- 5.1.2 SLA 3D打印机
-
- 5.1.2.1 原理
- 5.1.2.2 材料
- 5.1.2.3 特性
- 5.2 Flash Print
-
- 5.2.1 下载
- 5.2.2 使用说明
- 六、机械结构的设计
-
- 6.1 装配方式
-
- 6.1.1 螺栓连接
- 6.1.2 铆钉连接
- 6.1.3 榫卯连接
- 6.2 机械传动
-
- 6.2.1 连轴
-
- 6.2.1.1 法兰连轴器
- 6.2.1.2 梅花连轴器
- 6.2.1.3 万向联轴器
- 6.2.1.4 上交连轴
- 6.2.2 同步带轮
- 6.2.3 连杆
- 6.3 材料的选择
-
- 6.3.1 板材
-
- 6.3.1.1 亚克力
- 6.3.1.3 PC耐力板
- 6.3.1.4 碳纤板
- 6.3.1.5 玻纤板
- 6.3.2 管材
-
- 6.3.2.1 铝方管
- 6.3.2.2 不锈钢方管
- 6.3.3 型材
- 6.3.4 打印件
- 6.3.5 机加工件
-
- 6.3.5.1 加工方式
-
- 6.3.5.1.1车
- 6.3.5.1.2 铣
- 6.3.5.1.3 CNC
- 6.3.5.1.4 线切割
- 6.3.5.1.5 设计加工件思路
- 七、电机选型
-
- 7.1 步进电机
- 7.2 伺服电机
-
- 7.2.1 特点
- 7.2.2 控制模式
- 7.2.3 控制流程
-
- 7.2.3.1 一般工业上的流程
- 7.2.3.2 我们一般简单使用的流程
- 7.2.4 伺服电机的种类
- 7.2.5 编码器
-
- 7.2.5.1 什么是编码器
- 7.2.5.2 编码器分类
-
- 7.2.5.2.1 增量编码器
- 7.2.5.2.2 绝对编码器
- 7.2.5.3 工作原理
- 八、一些经验
-
- 8.1 开源
- 8.2 板材的选择
- 8.3 solid works一些小细节
-
- 8.3.1 Step
- 8.3.2 Ctrl+S
- 8.3.3 一般的装配体设计思路
- 8.3.4 快速测量
- 8.3.5 FeatureWorks-识别特征
- 8.4上交连接件
- 8.5 加工件降低成本的一种方式
- 8.6 付世龙学长分享 # 21 22 赛季队长
-
- 8.6.1 拉马
- 8.6.2 角接触轴承更换
- 九、更新日志
一、软件学习
1.1 solid works零件学习(2018版本)
学长提供系统的零件图部分教学视频
总共进行两次考核
第一次为草图绘制 第二次为零件图功能的综合使用
1.2 装配体自学
自行网络学习 部分向学长请教
二、标准件认识
2.1 MISUMI
链接:https://pan.baidu.com/s/1bFPMj90HsevNXPByze7KcQ
提取码:1234
2.2 螺丝
2.2.1 十字螺丝
尽量少用 容易滑丝
2.2.2 内六角螺丝
2.2.3 普通螺丝
常用
螺丝头有着较大的突出
突出的螺丝头可以作为一些机械限位(参考21年步兵云台pitch轴的机械限位)
2.2.4 平头螺丝
2.2.4.1 图示

2.2.4.2 用途
加工板材及加工件时可以和商家提出沉孔需求 可以达到基本和板材平面平行 避免和其他物件干涉
*但要注意板材等太薄不建议做沉孔 建议3MM厚度起
2.3 螺母
2.3.1 普通六角螺母
形状规则 可以构成简单的螺栓结构
上交步兵底盘骨架的连接利用了其形状规则的特性 在加工件中预留了六角螺母的槽位 将两者进行了结合
2.3.2 防松螺母
2.3.2.1 原理
在传统60度牙尖顶端有一个30度的楔面 这种结构使得螺栓在同螺母拧紧之后 阴阳螺纹之间会获得相比传统螺纹更大的摩擦力 所以有很好的防松效果
2.3.2.2 特点
较厚 设计时候需要考虑到位
因为螺母防松自锁 所以需要配合尖嘴钳等工具
所以设计时需要考虑到其他部分能不能留出位置让尖嘴钳伸进去进行拆装操作
包括螺丝刀能否伸到螺丝头处都需要考虑到
2.3.3 法兰螺母
有单侧法兰面 可以增大受力面积
但是体积较大一般用来连接铝型材
2.4 垫片
2.4.1 普通垫片
可以用来增大受力面积
考虑好外径内径即厚度等参数即可
2.4.2 弹簧垫片
弹簧垫片一般来说前后配合平垫片使用
压缩后的反弹力可以配合螺母起到防松作用
2.4.3 双叠自锁垫片
较厚 但是有着其名字一样的功能
可以自锁防松 还可以拆卸重复使用
2.5 轴承
2.5.1 轴向力和径向力

2.5.2 常用轴承介绍
2.5.2.1 法兰轴承
2.5.2.1.1图片展示

2.5.2.1.2特性
有单侧法兰面和轴承外圈连接
可以约束住单侧轴向位移(可以两个法兰轴承配合使用同时约束住两个方向的轴向位移)
可以承受轴向和径向两种负荷
2.5.2.2 平面推力球轴承
2.5.2.2.1 图片展示

2.5.2.2.2 特性
具有很高的刚度且可以承受很高的轴向负荷
也可以在高转速环境下运作
但是不能承受径向负荷
2.5.2.3 深沟球轴承
2.5.2.3.1图片展示

2.5.2.3.2 特性
是最广泛用到的轴承
低摩擦 低噪音 高转速 等特性
主要承受径向负荷 可以承受一定的轴向负荷
2.5.2.4 交叉滚子轴承
2.5.2.4.1 图片展示
RA

RU
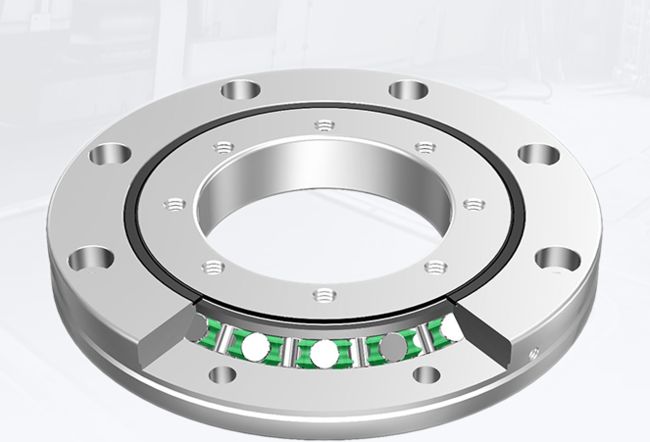
2.5.2.4.2 特性
属于高精密轴承 价格一般较贵
轴承的滚子在内轮与外轮间 间隔交叉地彼此成直角方式排列 它们能同时承受来自各方向荷重
一般用于机器人关节处
主要分为RA和RU两大类
RA有无安装孔需要自己设计加工件配合安装使用 RU有安装孔
2.5.2.4.3 注意事项
由于是价格昂的高精度轴承 特别是RA类的 加工件一定要提前定好内外公差 配合的时候一定不能过于暴力 否则会很容易让轴承直接报废
2.5.2.5 角接触轴承
2.5.2.5.1 图片展示

2.5.2.5.2 特性
角接触球轴承可同时承受径向负荷和轴向负荷
能在较高的转速下工作
但主要承受较大单向轴向负荷
接触角度越大 承受负荷能力越大 接触角度一般分为15° 30° 40°
NSK特别生产接触角度为25°的此类轴承
2.6 铜柱铝柱
没什么多大的区别
主要在于重量不同
分求好自己需要单牙还是双牙即可
三、官方物资的认识(主要电控方面)
3.1 输入系统
3.1.1 EoboMaster UWB 定位系统
3.1.2 图片展示

3.1.3 介绍
对机器人全场定位
有严格的安装位置要求 参考官方文件
需要提前为机器人设计好安装位置 且需要方便安装拆卸
3.2 输出系统(大部分电机都需要配合电调一同使用)
3.2.1RboMsater GM6020
3.2.1.1 展示图片

3.2.1.2 特点
尺寸 直径60 高度20
特点为空心轴结构
内部集成驱动板不需要配合电调使用
3.2.1.3技术参数

3.2.1.4 通常用途
云台yaw轴驱动电机
云台pitch轴驱动电机
舵轮航向电机
3.2.2 RoboMaster M3508 减速直流电机
3.2.2.1 展示图片

3.2.2.2 特点
尺寸 直径25 高度 8(不含减速箱)
需要联轴驱动
具有减速箱 有着很大的扭矩
也可以去减速箱
3.2.2.3 技术参数

3.2.2.4 通常用途
轮组驱动(多会拆开换上角接触轴承)
工程爪子转动
哨兵底盘驱动
英雄拨弹仓驱动
去减速箱后可以驱动发射机构
3.2.3 RoboMaster M2006 P36直流无刷减速电机
3.2.3.1 展示图片

3.2.3.2 特点
具有减速箱 有着和6020相近的扭矩
有着和3508相近的转速
体积极小
3.2.3.3 技术参数

3.2.3.4 通常用途
弹舱拨盘驱动
参考 特点一二可以作为迷你步兵轮组驱动电机
工程矿石传动
3.3 控制核心(机械组简单掌握尺寸即放置位置即可)
3.3.1 RoboMaster开发板C型(基本为主要使用的控制板)
3.3.1.1 展示图片

3.3.1.2 特点
内置陀螺仪
体积较小
可以连接舵机和各类电机等通用配件
接口较少 可以接入扩展版
3.3.2 RoboMaster开发板A型(19 20年使用 之后应该很少使用)
3.3.2.1 展示图片

3.3.2.2 尺寸信息
尺寸(长宽):85 × 58 mm
3.3.2.3 特点
接口丰富
体积较大
不带陀螺仪 需要外接陀螺仪
3.4 裁判系统 只讲解注意点(详情自行阅读机器人制作规范)
3.4.1 灯条模块
灯条模块的连接件可以使用上交设计的进行降低高度
3.4.2 装甲板模块
安装后需要稳定牢固
注意安装架和装甲板连接时卡扣需要卡紧再加上螺丝 否则会导致触点接触不到 装甲板离线等问题
3.4.3 主控模块
需要安装到装甲板上且需要放在设计好的保护壳中
3.4.4 电源管理模块
选择放置需要设计时候考虑好
是否会使电控同学
3.4.5 场地交换模块(只有地面机器人需要)
都是放置在车底的
一般是放在车底正中间 但是如果工程同学救援的需要可以向装甲板方向移动
3.4.6 测速模块
测速模块使通过两个光电门测速
如果需要设计枪管 要把传感器的干预位置留出
固定一般是需要连接定位的
3.4.7 相机图传模块
摄像头是给视觉进行识别的
图传是用来连接客户端让操作手操控的
3.4.8 超级电容管理模块
超级电容可以给机器人提供短暂的超高功率
属于易损贵重物品 不能带上飞机
机器人安放位置需要安全稳定
3.5 其他配件
3.5.1 RoboMaster 17mm荧光弹丸充能装置
3.5.1.1 展示图片

3.5.1.2 介绍
可以快速给荧光弹丸充能
一般安装在拨盘出弹口
所以拨盘的实际设计记得预留安装位置
四、导出工程图
4.1 solid works将板材类零件图转换成工程图
4.1.1 步骤(加粗的一定一定一定要注意)
**1.**打开对应零件图—左上角文件—从零件制作工程图—删除左列“图示格式”—右下角比例一定要改成1:1—点开右侧第四个图标(视图调色板)—将正面的一个视图拖到合适位置—框住整张图可以发现全选了所有圆孔的圆心定位线 DEL删除—工具栏找到另存为—选择电脑合适位置—写好文件名(板材类名字养成规范 统一先写厚度再写名称再写几份)eg:3mm Yaw 一份 —保存类型改为Dwg保存即可—关掉现在的工程图会提示你保存—全部不保存
2. 使用CAD打开保存好的Dwg格式文件—先打开所有相同厚度的—在CAD中新建页—框住单一零件的工程图(CAD框选方式有些不一样 只需要点两下即可框选两点为对角线的矩形区域)—复制粘贴在新建页中 需要几份就粘贴几份—同理其他的相同厚度零件也是相同的操作粘贴到新建页中—简单合理的在新建页中排版—检查无误后保存或另存为—选择好电脑合适位置—文件名直接写厚度即可 eg:3mm 一份 —文件类型选择Dwg或者Dxf都可以—其它厚度的同样操作—如果有沉孔需求只需要截图标出来哪些孔位—截图放在同一个文件夹中重命名为多厚的沉孔 eg:3mm沉孔 —解压缩这个文件夹发给商家即可
4.2 solid works将管材类零件图转换成工程图
区别和板材的不大
主要在放视图的时候 六个面都放上 还要附加上左上或右上视图
一根铝方管一个文件
不需要像板材统一放到几毫米里
命名的时候标号份数 厚度
最好再附带上step一同解压给商家
五、3D打印
5.1 3D打印机和材料的分类(不附带图片展示 请自行百度)
5.1.1 FDM 3D打印机
5.1.1.1 原理
用过熔融沉积快速成型
5.1.1.2 材料
ABS和PLA
5.1.1.3 特性
结构简单 甚至可以DIY
材料价格便宜
精度不高 表面粗糙
打印速度慢
由于是属于分层打印
如果受剪切力需要注意
5.1.2 SLA 3D打印机
5.1.2.1 原理
通过光固化成型
5.1.2.2 材料
光敏树脂
5.1.2.3 特性
精度高
速度较慢
材料价格高
材料一般有毒 无毒材料也有很大异味
光敏树脂材料较脆 强度不高
5.2 Flash Print
5.2.1 下载
链接:https://pan.baidu.com/s/1pV5KZRfAvlFBP9hdgFFEUw
提取码:1234
下载安装好之后不要更新 旧版本操作简单
5.2.2 使用说明
参考钉钉文件
六、机械结构的设计
6.1 装配方式
6.1.1 螺栓连接
螺丝和螺母的最基本连接方式
6.1.2 铆钉连接
比较方便的且占用体积小的连接方式
一般用于铝方管的连接
拆卸需要使用钻头打坏 不可重复使用
铆钉枪一般体积也较大 不方便携带
6.1.3 榫卯连接
这是中国古代传承下来的一种很巧妙简单的连接方式
自行上网上看看不同的榫卯类型
榫卯用好后可以让板材拼接在一起
同时拥有着不错的强度
最重要的是减少了螺丝螺母的使用
会有不错的减重效果
当然也不用完全使用榫卯
榫卯和螺栓的配合使用
可以让结构和重量都有着不错效果
6.2 机械传动
6.2.1 连轴
连轴一般用于电机和传动机构的连接 需要配合联轴器一同使用
6.2.1.1 法兰连轴器

连轴方式简单
但是体积较大
两个圆柱体连接处容易断裂
20年老英雄比赛场上法兰连轴断裂
6.2.1.2 梅花连轴器

以梅花连轴器为代表介绍着一类的联轴器
主要特点就是允许一定的偏心偏角传动
其中最后一行刚性联轴器是可以作为轮组的连轴的
但是缺点比较多
体积比较大 很长 会让连轴传动结构很长 直接拉长轮组之间距离
因为轮组连轴需要的强度比较高
所以一般选用刚性联轴器
随之会失去偏心偏角的特点
因为这类联轴器不是通过键槽类型连轴
而是通过螺丝拧紧来紧轴的
理论上来说越久越好
所以如果轮组传动杆和电机固定杆同轴度不高的话
紧轴程度越大的话
相当于给电机和传动杆硬撇到同一轴心
这样对电机和传动杆都会有很大的损坏
但是不拧的太紧尤其不到很好的连轴效果
20年老步兵有一组轮组出现过这个问题 紧轴太紧轮子根本转不动
6.2.1.3 万向联轴器

应该看到图片很好理解
可以达到不同轴传动的效果
具体怎么使用看你需要多少节万向节
强度也比较高
汽车的轮组驱动也是万向节连轴
具体使用方式很灵活
可以使用前先去看看相应节数的动画视频
设计的好可以很好的优化驱动电机的位置
但是使用的时候尽量别占用太多空间
6.2.1.4 上交连轴
YYDS
占用体积极小
需要注意的是轮组的装配顺序
参考上交步兵开源的技术文档
6.2.2 同步带轮
一般齿形选择:方型齿、公制方型齿、圆弧齿
一般我们用的就是圆弧齿 如果没什么特殊需求都用圆弧齿

通过转速和功率找到要用几M的齿型

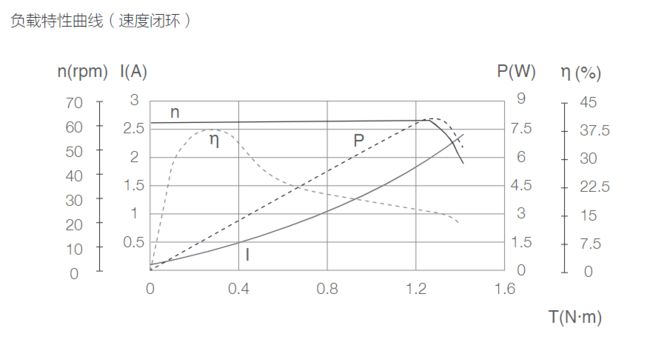
这边给出了6020的参数表
因为电控代码里根据不同情况会根据情况使用开环和闭环
所以选择都满足的齿型
就可以设计相应的齿轮和同步带
同步带的厚度建议比齿轮的厚度少1mm
同步带计算网站:http://www.hsdjmjx.com/news2.asp

所算出来的节线长最好是5的倍数 这样方便购买
可以反向确定你的中心距
6.2.3 连杆
连杆的设计是没有天花板的
因为他完全取决于你的几何能力
连杆虽然巧妙
但是一般都需要大量的空间
对于我们这种空间即为珍贵的机器人
只用在极少部位且两岸结构简单
一般不会超过二连杆
主要用在pitch轴传动 和悬挂的连杆
这个根据个人兴趣和能力来
给你扔一个连杆的模拟软件和配套的教学PDF
全英文的 玩玩就好了
软件操作起来应该不会太难 有点像几何画板
链接:https://pan.baidu.com/s/1YEQauR4i8Hw1PJFK_rCgdw
提取码:1234
6.3 材料的选择
6.3.1 板材
6.3.1.1 亚克力
这东西做一做小玩意还行
太脆了
基本上机器人不会用
6.3.1.3 PC耐力板
完全可以替代亚克力
它的透光率比亚克力还要高
也比亚克力更耐高温 PC 120度 亚克力 70度
然后
同等厚度
PC耐冲击强度是亚克力板的30-50倍
6毫米开始PC厚板材就是防弹材料 3毫米PC板普通成年人用榔头也砸不碎
DDDD
6.3.1.4 碳纤板
各方面性能都很高 确实轻
配得上他的价格
也可以加工碳纤管 比如做无人机的机臂
碳纤导电 碳纤导电 碳纤导电
走线的话一定要包裹线管
不要有线材外露
线材与板材边角摩擦的地方
要么打磨圆滑点
要么柔软物品垫着
因为
碳纤导电 碳纤导电 碳纤导电
6.3.1.5 玻纤板
密度大概是碳纤的两倍
但是依然不是会很重
重点是
它有着碳纤差不多的性能
而且它便宜
也是我们用的最多的板材
颜色常用的为 黑色 绿色 黄色
6.3.2 管材
6.3.2.1 铝方管
一般用作为机器人的骨架
对铝方管的镂空需要合理
自己根据实际情况把握
一般厚度都会选用1mm 或2mm
6.3.2.2 不锈钢方管
强度很高 一般会选用铝方管 强度对我们来说完全够了
我们之前用麻花钻钻孔 钻孔都红了
钻断好几根钻头就钻了几个孔
6.3.3 型材
给你些铝型材草图 直接拉伸需要长度即可
链接:https://pan.baidu.com/s/11_vLnGAxyr41e-tngy05lg
提取码:1234
只介绍方型铝型材
基本是用来搭建场地的
需要注意选型分国标和欧标的
角码螺丝也是分国标欧标的
要和铝型材同型号
可以让客服发配套链接购买
铝型材加万向轮
有两种方法
一种是直接让商家攻丝万向轮相应的螺纹
另一种是加上连接板
长这样

铝型材的常规加工方式

6.3.4 打印件
强度不高 精度有一点需求的情况下选择
比如说弹舱和拨盘
外发一般选材 尼龙 和 光敏树脂
6.3.5 机加工件
6.3.5.1 加工方式
6.3.5.1.1车
注意点
车到头一定会产生圆角
设计的时候记得给头部合适的圆角
可以方便加工
6.3.5.1.2 铣
表面加工会有点粗糙
6.3.5.1.3 CNC
轴越多越贵
没什么其他可以说的
就是贵
6.3.5.1.4 线切割
适合大面积的切割
所以便宜 速度快
表面一般有一些粗糙
6.3.5.1.5 设计加工件思路
首先需要满足设计需求
同需要考虑加工简易程度
一般都是先线切割再车再CNC
CNC使用越少越便宜 工期越短
七、电机选型
7.1 步进电机
7.2 伺服电机
7.2.1 特点
- 精度极高
- 反应迅速
- 价格高
7.2.2 控制模式
-
位置控制
-
速度控制
-
转矩控制 可以进行张力控制或者是压力控制
7.2.3 控制流程
7.2.3.1 一般工业上的流程
控制器通常会使用我们常说的PLC
7.2.3.2 我们一般简单使用的流程
一般来说我们使用的伺服电机大多会包含编码器
7.2.4 伺服电机的种类
我暂时感觉没什么必要详细了解区别,如有需要自行百度科普
常用的分为SM型和AC型
7.2.5 编码器
7.2.5.1 什么是编码器
可以理解为编码器就是把电机的状态信息转换为可通讯信号的装置
编码器*(encoder)*是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。
7.2.5.2 编码器分类
7.2.5.2.1 增量编码器
- 断电后无法记录电机当前位置 上电后需要重新找原点
- 价格低
7.2.5.2.2 绝对编码器
- 断电后可以记录断电时状态 无需复原动作
- 价格高
7.2.5.3 工作原理
与其他的电机相比最大的优点它是闭环控制
简单描述为
- 下达指令值
- 编码器检测当前值
- 比较指令值和当前值进行误差计算
- PID运算并控制驱动器调整
- 重复以上
八、一些经验
想到哪写哪没有先后顺序
8.1 开源
不要急着看很多开源
要精看
8.2 板材的选择
板材在设计好
采购之前需要询问电控同学
哪些地方需要大量布线且不方便做绝缘处理
如果更换为玻纤材质不影响强度的话
有限选择玻纤板材
8.3 solid works一些小细节
8.3.1 Step
选用214较好
主要是有颜色
一般Step打开很慢
记得打开后另存为solid works格式
下次打开就会很快了
一般Step是不能修改的
左边零件栏找到取消链接
等待完成后就可以对零件打开或修改
8.3.2 Ctrl+S
慢慢的你就会记得了
8.3.3 一般的装配体设计思路
-
装配体第一个放入的零件是固定的
如果有需要可以右键-浮动
-
如果需要再画一个小零件
可以先画一个大概的尺寸
放入装配体中
对着装配体编辑相应零件(再挖孔时候非常方便)
-
装配体也不是全部都是零件
对称和重复的部分可以先配合成小型装配体
再组装成大型装配体
比如说轮组只需要装配一组就可以其他部分直接用
8.3.4 快速测量
点一个面
按住Ctrl点另一个面
右下角信息栏会出现垂直距离
或者夹角等信息
也可以简单测量圆心距等信息
8.3.5 FeatureWorks-识别特征
有时候我们从别处拿到的图
一般看不到作图过程
这个时候我们需要进行识别特征下

FeatureWorks-识别特征
之后就自动生成以下

8.4上交连接件

用于连接两块垂直的板或其他物件
有加工厂可以直接卖现货
可以当成标准件
这类连接件可以自行扩展应用
注意设计时候放置位置
螺丝头一定要拧在板上而不是连接件上
8.5 加工件降低成本的一种方式
举这个栗子 是灯条连接的加工件

类似这种两块板可以连接在一起的加工件
如果没有特别高精度的要求
可以和商家说
将连接处下面的铝板突出一个头
上面的铝板留一个孔
然后焊接处理
亲测相比CNC的报价直接从100降到了50
8.6 付世龙学长分享 # 21 22 赛季队长
8.6.1 拉马
是用来取轴承用的
部分轴承是内嵌在某一物体中 轴承的取出 一般都是内圈受力 而不是外圈 外圈受力会导致轴承破损
我们很多时候的暴力拆卸都会导致轴承失效或者内圈留在轴里取不出来 所以用这种工具取出会很方便
可以自己找一些演示视频看一下使用原理
图片展示

8.6.2 角接触轴承更换
轴承部分已经介绍了角接触轴承的优势
“我们按照上交那种轮组方案的时候 需要对电机内的轴承进行更换,是因为麦轮有轴向的分力,这个力会通过3508轴 传递给3508内的两个深沟球轴承 所以要将内部的深沟球轴承更换为角接触轴承 以防止受力过大导致电机或轴承直接损毁
而3508内轴承的拆卸部分可能比较难取 就可以用到这种拉玛进行取出。”
九、更新日志
第二次培训之后开始记录
2021-12-9 付世龙学长分享 拉马(8.6.1) 角接触轴承更换(8.6.2)
2022-3-18 加工件降低成本的一种方式(8.5)
2022-3-21 伺服电机(7.2)
2022-3-22 CSDN中目录添加题序号
2022-3-24 FeatureWorks-识别特征(8.3.5)