Python——基于局部自适应二值化(递归法)的裂缝图像分割
Python——基于局部自适应二值化(递归法)的裂缝图像分割
-
- Python------基于局部自适应二值化(递归法)的裂缝图像分割
- 一、局部自适应二值化
- 二、递归法局部自适应二值化介绍
- 三、Python实现
-
- 1、将图像划分为若干个窗口
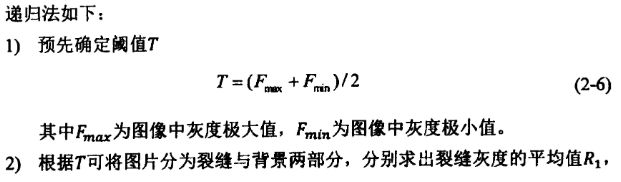
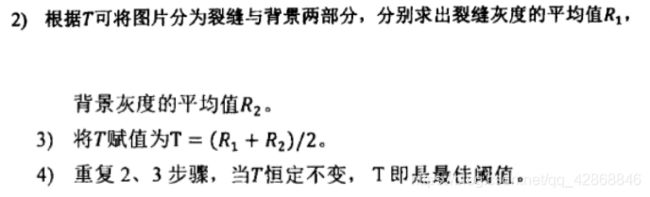
- 2、预先确定阈值T
- 3、确定各个窗口的最佳阈值
- 4、利用OpenCV中的threshold函数实现二值化
- 5、图像重构输出
- 四、测试
- 五、完整代码
- 六、不足
Python------基于局部自适应二值化(递归法)的裂缝图像分割
一、局部自适应二值化
可以参考这几篇文章:
- 图像的自适应二值化
- OpenCV全局/局部阀值二值化
- OpenCV_基于局部自适应阈值的图像二值化
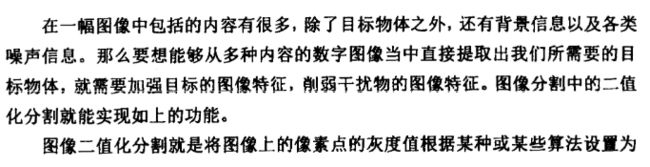
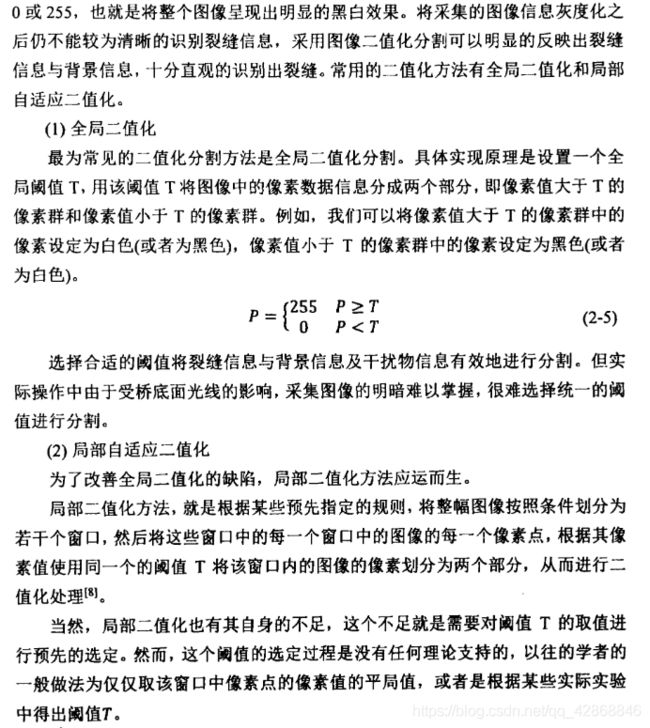
二、递归法局部自适应二值化介绍

三、Python实现
1、将图像划分为若干个窗口
Step 1:确定窗口大小

注:因为文章中只说了按照条件,并没有给出具体的条件,于是,我便自定义了窗口的大小,window_w和window_h,然后计算出每幅图像的窗口数量,窗口越大,窗口数量越少。
#--------划分窗口---------
#窗口大小
window_w = 11 #11是经过多次试验后,比较令人满意的经验值
window_h = 11
window_size = window_w * window_h
window_w_num = math.floor(mw/window_w) #取整,图像的宽共有多少个
window_h_num = math.floor(mh/window_h)
print(window_w_num,window_h_num)
#窗口总数
window_num = window_w_num * window_h_num
print(window_num)
Step 2:将图像中每个窗口的值单独取出,放入windows二维矩阵
注:此是输入的图像的灰度图像,每一幅图像都是由不同的灰度值像素点构成,划分窗口是概念上的理解,真正计算的还是数值。
示例图片:(宿舍采的裂缝)
在做数值处理的时候,划分窗口就好比怎么把两个相同面积但长宽不同的长方体相互转换。好比:
我想破脑阔,就算用四个循环也没办法实现。后来我舍友一句话点醒了我,她说转换不了就打破呗。哦!我又悟了!
于是。。。
那我就先把原来的图像转化为一维数组(蓝色),再把它调整为我想要的窗口大小,这样就避免了直接转换的困难。完美!
windows = [] #二维数组,存放窗口值(对应红色矩形框)windows.shape = (window_num, window_size)
for m in range(window_h_num): #四个循环,完成转换
for k in range(window_w_num):
for i in range(window_h):
for j in range(window_w):
windows.append(median[i+window_h*m][j+window_w*k])
arr_windows = np.array(windows) #列表转数组
print(arr_windows.shape)
reshape_arr = arr_windows.reshape(window_num,window_size)
print(reshape_arr.shape)
2、预先确定阈值T

F_max = np.amax(reshape_arr, axis=1) #按行找出最大值
print(reshape_arr[0,:])
#print(F_max[0],F_max.shape) #713
F_min = np.min(reshape_arr, axis=1)
print(F_min[0])
3、确定各个窗口的最佳阈值
#-----------确定各个窗口的最佳阈值-----------
Ts = np.zeros(window_num)
for i in range(window_num):
Ts[i] = round((int(F_max[i]) + int(F_min[i])) / 2)
T_uint = np.array(Ts,dtype='uint8')
print(T_uint.shape,T_uint.dtype,F_max.dtype)
# temp = np.zeros(window_size,dtype='uint8')
#print(reshape_arr.shape,temp.shape)
# ground = np.empty(window_size,dtype='uint8')
# crack = np.empty(window_size,dtype='uint8')
ground = []
crack = []
for i in range(window_num):
T = 0
temp = reshape_arr[i,:]
temp = np.array(temp,dtype='uint8')
T1 = T_uint[i] #一般T都不会是零
#print(T1)
while T1 != T : #循环实现阈值更新
T = T1
for j in range(window_size):
if temp[j]>= T1:
ground.append(temp[j])
else:
crack.append(temp[j])
R1 = int(np.mean(crack))
R2 = int(np.mean(ground))
T1 = int((R1 + R2) / 2)
#print(T,T1)
T_uint[i] = T1
print(T_uint.shape,T_uint.dtype) #713个窗口
4、利用OpenCV中的threshold函数实现二值化
#---------局部自适应二值化-----------
binary_gray = np.zeros((window_num,window_size),dtype='uint8')
for i in range(window_num):
temp = reshape_arr[i, :]
temp = np.array(temp, dtype='uint8')
#temp_reshape = np.reshape(temp,(window_h,window_w))
ret, th = cv.threshold(temp, T_uint[i], 255, cv.THRESH_BINARY)
thresh = np.array(th, dtype='uint8')
thresh = np.squeeze(thresh)
binary_gray[i, :] = thresh
print(binary_gray.shape,thresh.shape)
5、图像重构输出
#---------图像重构输出显示-------------
binary_gray = np.reshape(binary_gray,window_num*window_size)
print(binary_gray.shape)
c = 0 #测试用的,可以去掉
gray_binary = np.zeros((window_h_num*window_h,window_w_num*window_w),dtype='uint8')
for m in range(window_h_num):
for k in range(window_w_num):
for i in range(window_h):
for j in range(window_w):
gray_binary[i+window_h*m][j+window_w*k] = binary_gray[c]
c = c + 1
print(c)
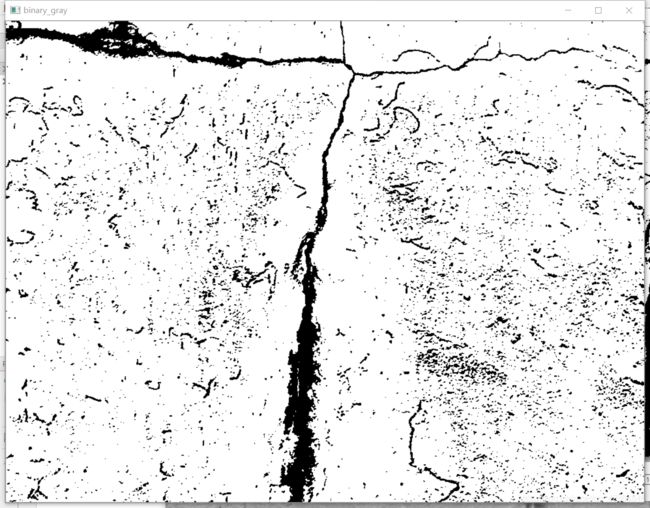
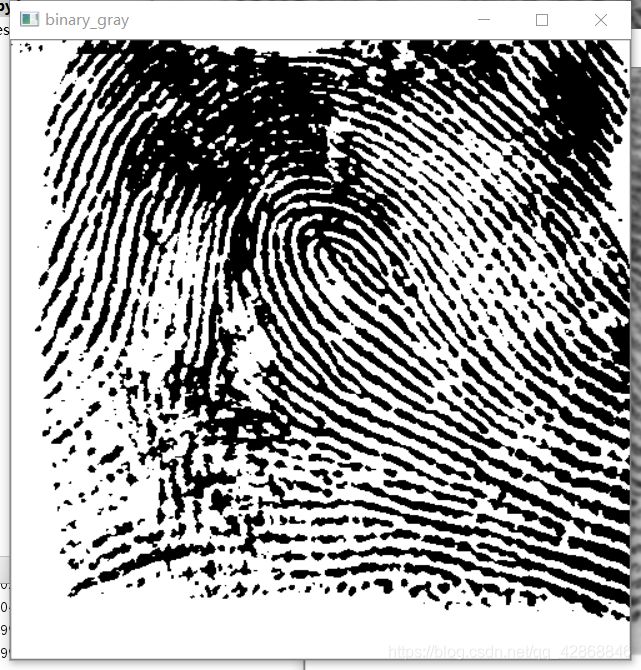
cv.imshow('binary_gray',gray_binary)
到此,递归法局部自适应二值化就完成啦!看一下效果。
四、测试
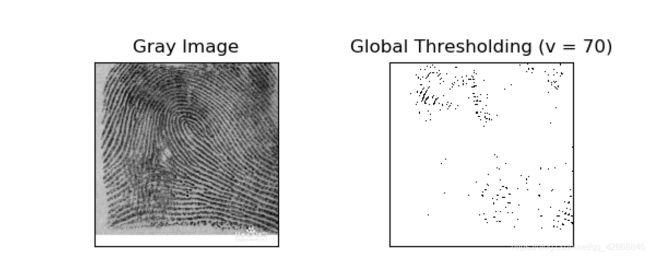
我们用上述裂缝图像,先用OpenCV自带的函数看一下效果。
代码:
#coding = utf-8
import cv2 as cv
import numpy as np
import math
from skimage import morphology
from skimage import img_as_float
from skimage import img_as_ubyte
import matplotlib.pyplot as plt
image = cv.imread("C:\\Users\\LENOVO\\Desktop\\004.png") #你的图片路径
# 图像灰度化
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY) #加权平均法 Gray(i,j) = 0.299R(i,j) + 0.578G(i,j) + 0.114B(i,j) 可尝试其他方法,但目前此方法最优
cv.imshow('show', gray)
ret,th1 = cv.threshold(gray,70,255,cv.THRESH_BINARY) #全局二值化
# 3为Block size, 5为param1值
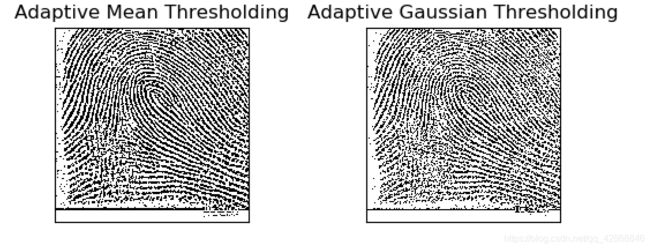
th2 = cv.adaptiveThreshold(gray,255,cv.ADAPTIVE_THRESH_MEAN_C,cv.THRESH_BINARY,11,5) #adaptive_thresh_mean局部二值化
th3 = cv.adaptiveThreshold(gray,255,cv.ADAPTIVE_THRESH_GAUSSIAN_C,cv.THRESH_BINARY,11,5) #adaptive_thresh_gaussian局部二值化
titles = ['Gray Image', 'Global Thresholding (v = 70)',
'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
images = [gray, th1, th2, th3]
print(ret)
for i in range(4):
plt.subplot(2,2,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
while True:
key = cv.waitKey(10)
if key == 27:
cv.destroyAllWindows() #按Esc键退出
效果:
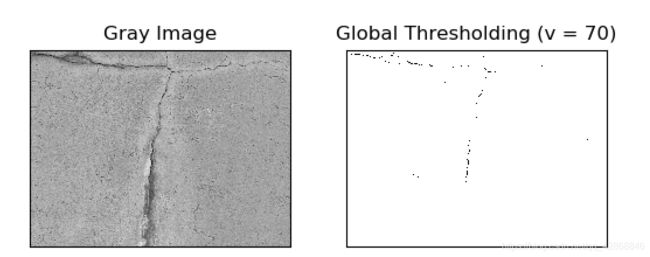
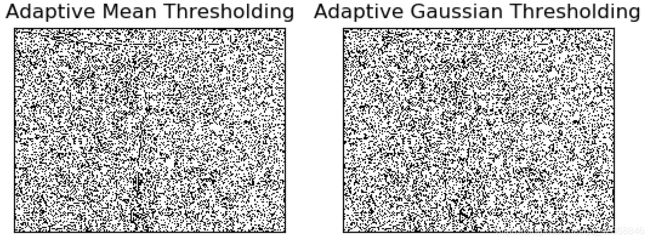
emmmm,全局的裂缝几乎快没了,局部的一片混乱55555
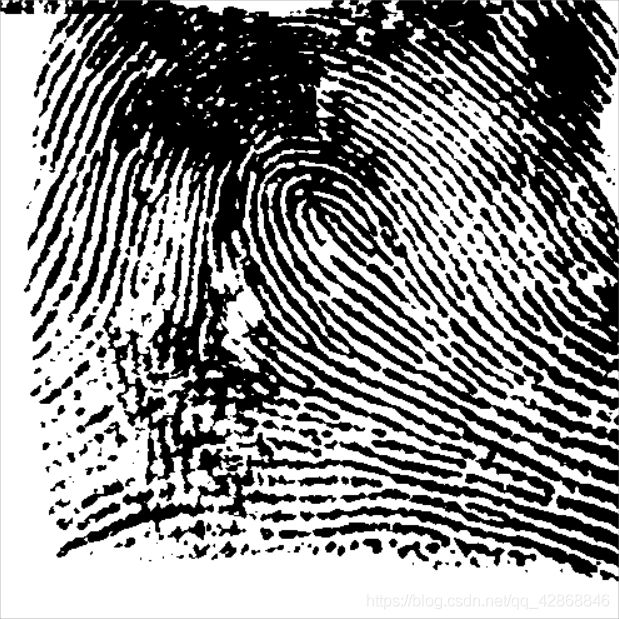
看一下本文中的方法的结果:
貌似还行,,,但这背景也是太杂了。。。
于是,看着OpenCV自带的函数,我又悟了!-v-
在阈值那里,把最终得到的最佳阈值都减去5(5应该是经验值),效果8错。
五、完整代码
代码的前面部分是图像预处理。
#coding=utf-8
import cv2 as cv
import numpy as np
import math
from skimage import morphology
from skimage import img_as_float
from skimage import img_as_ubyte
import matplotlib.pyplot as plt
#1、加载图片
image = cv.imread("C:\\Users\\LENOVO\\Desktop\\004.png") #你的图片路径
(h, w, d) = image.shape
print("width={}, height={}, depth={}".format(w, h, d))
# 2、图像灰度化
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY) #加权平均法 Gray(i,j) = 0.299R(i,j) + 0.578G(i,j) + 0.114B(i,j) 可尝试其他方法,但目前此方法最优
cv.imshow('show', gray)
#3、中值滤波 (论文中用的是中值滤波,但我采的图片没有很多椒盐噪声,所以换为高斯滤波器,名字懒得改了-v-)
median = cv.GaussianBlur(gray, (3, 3), 0) #sigmaX = 0时,标准差大小由高斯核大小自动确定
cv.imshow('Gaus', median)
(mh, mw) = median.shape
# median = cv.medianBlur(gray,5) #sigmaX = 0时,标准差大小由高斯核大小自动确定
# cv.imshow('Median', median)
# (mh, mw) = median.shape
print("medianwidth={}, medianheight={}".format(mw, mh))
#4、局部自适应二值化(递归法)
(gh, gw) = gray.shape
print("graywidth={}, grayheight={}".format(gw, gh))
# for i in range(gh):
# for j in range(gw):
# print(gray[i][j])
#--------划分窗口---------
#窗口大小
window_w = 11
window_h = 11
window_size = window_w * window_h
window_w_num = math.floor(mw/window_w)
window_h_num = math.floor(mh/window_h)
print(window_w_num,window_h_num)
#窗口总数
window_num = window_w_num * window_h_num
print(window_num)
windows = []
#print(windows,windows.shape)
for m in range(window_h_num):
for k in range(window_w_num):
for i in range(window_h):
for j in range(window_w):
windows.append(median[i+window_h*m][j+window_w*k])
arr_windows = np.array(windows)
print(arr_windows.shape)
reshape_arr = arr_windows.reshape(window_num,window_size)
print(reshape_arr.shape)
F_max = np.amax(reshape_arr, axis=1)
print(reshape_arr[0,:])
#print(F_max[0],F_max.shape) #713
F_min = np.min(reshape_arr, axis=1)
print(F_min[0])
#-----------确定各个窗口的最佳阈值-----------
Ts = np.zeros(window_num)
for i in range(window_num):
Ts[i] = round((int(F_max[i]) + int(F_min[i])) / 2)
T_uint = np.array(Ts,dtype='uint8')
print(T_uint.shape,T_uint.dtype,F_max.dtype)
# temp = np.zeros(window_size,dtype='uint8')
#print(reshape_arr.shape,temp.shape)
# ground = np.empty(window_size,dtype='uint8')
# crack = np.empty(window_size,dtype='uint8')
ground = []
crack = []
for i in range(window_num):
T = 0
temp = reshape_arr[i,:]
temp = np.array(temp,dtype='uint8')
T1 = T_uint[i] #一般T都不会是零
#print(T1)
while T1 != T :
T = T1
for j in range(window_size):
if temp[j]>= T1:
ground.append(temp[j])
else:
crack.append(temp[j])
R1 = int(np.mean(crack))
R2 = int(np.mean(ground))
T1 = int((R1 + R2) / 2)
#print(T,T1)
T_uint[i] = T1 - 5
print(T_uint.shape,T_uint.dtype) #713个窗口
#---------局部自适应二值化-----------
binary_gray = np.zeros((window_num,window_size),dtype='uint8')
for i in range(window_num):
temp = reshape_arr[i, :]
temp = np.array(temp, dtype='uint8')
#temp_reshape = np.reshape(temp,(window_h,window_w))
ret, th = cv.threshold(temp, T_uint[i], 255, cv.THRESH_BINARY)
thresh = np.array(th, dtype='uint8')
thresh = np.squeeze(thresh)
binary_gray[i, :] = thresh
print(binary_gray.shape,thresh.shape)
#---------图像重构输出显示-------------
binary_gray = np.reshape(binary_gray,window_num*window_size)
print(binary_gray.shape)
c = 0
gray_binary = np.zeros((window_h_num*window_h,window_w_num*window_w),dtype='uint8')
for m in range(window_h_num):
for k in range(window_w_num):
for i in range(window_h):
for j in range(window_w):
gray_binary[i+window_h*m][j+window_w*k] = binary_gray[c]
c = c + 1
print(c)
cv.imshow('binary_gray',gray_binary)
plt.imsave('C:\\Users\\LENOVO\\Desktop\\binary_gray.png',gray_binary)
while True:
key = cv.waitKey(10)
if key == 27:
cv.destroyAllWindows() #按Esc键退出
六、不足
1、算法时间较长,比如上面那张图987x742,需要跑大概十几分钟,OpenCV自带的函数就几秒钟
2、特定场景表现得较好,有些场景表现不好
例如下面这张图:
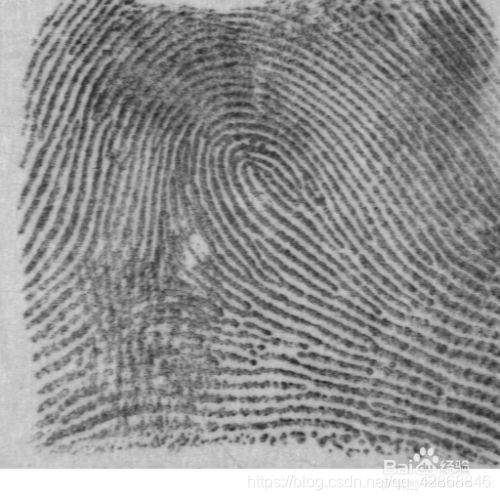
OpenCV自带函数的二值化效果:
本文中的递归法(不减去5):
本文中的递归法(减去5):
结论:减去5应用比较广,且细节清楚,但整体效果还是不如OpenCV自带的。
*** 第一次写博客,记录更容易成长。知道自己很菜,但慢慢来。若有错误之处,欢迎指正交流。***