【手把手反内卷】开创全新AI多模态任务一视听分割:代码实践、优化教程(二)
前言
理论部分请看上一篇文章:
简要概述:我们要知道图像中哪个物体在发声如下视频演示:
gif 不能发出声音,大家脑补一下场景中有很多车,只有这辆120在发出声音,所以分割出发出声音的物体。
这是一位歌手时而唱歌,时而弹琴场景,只弹琴时,不分割人体,唱歌时,分割人体。
代码相对路径介绍(我的版本,非官方)
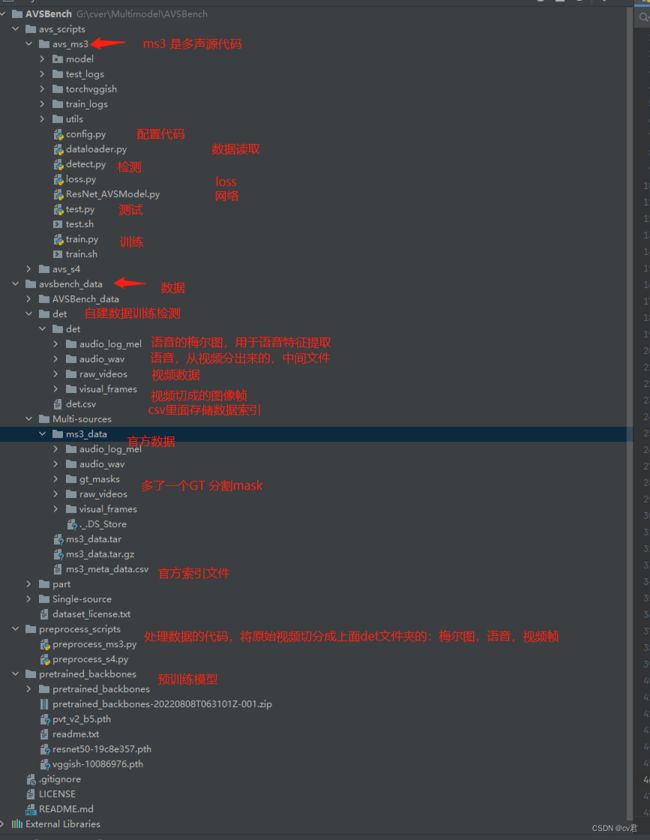
大家可以通过下载我的百度网盘(附带全部数据和代码),也可以下载官方代码,但不含数据,只能申请得到。
训练
先看train.py
看下面代码的help里面。
parser.add_argument("--session_name", default="MS3", type=str, help="使用MS3是对数据里的Multi-sources下的数据进行训练,是多声源数据,也就是,可能同时有多个物体发声")
parser.add_argument("--visual_backbone", default="resnet", type=str,
help="use resnet50 or pvt-v2 as the visual backbone")
parser.add_argument("--train_batch_size", default=4, type=int)
parser.add_argument("--val_batch_size", default=1, type=int)
parser.add_argument("--max_epoches", default=5, type=int)
parser.add_argument("--lr", default=0.0001, type=float)
parser.add_argument("--num_workers", default=0, type=int)
parser.add_argument("--wt_dec", default=5-4, type=float)
parser.add_argument('--masked_av_flag', action='store_true', default=True,
help='使用作者论文里说的loss: sa/masked_va loss')
parser.add_argument("--lambda_1", default=0.5, type=float, help='均衡系数weight for balancing l4 loss')
parser.add_argument("--masked_av_stages", default=[0, 1, 2, 3], nargs='+', type=int,
help='作者的设置compute sa/masked_va loss in which stages: [0, 1, 2, 3]')
parser.add_argument('--threshold_flag', action='store_true', default=False,
help='whether thresholding the generated masks')
parser.add_argument("--mask_pooling_type", default='avg', type=str, help='the manner to downsample predicted masks')
parser.add_argument('--norm_fea_flag', action='store_true', default=False, help='音频标准化normalize audio-visual features')
parser.add_argument('--closer_flag', action='store_true', default=False, help='use closer loss for masked_va loss')
parser.add_argument('--euclidean_flag', action='store_true', default=False,
help='use euclidean distance for masked_va loss')
parser.add_argument('--kl_flag', action='store_true', default=True, help='KL散度 use kl loss for masked_va loss')
parser.add_argument("--load_s4_params", action='store_true', default=False,
help='use S4 parameters for initilization')
parser.add_argument("--trained_s4_model_path", type=str, default='', help='pretrained S4 model')
parser.add_argument("--tpavi_stages", default=[0, 1, 2, 3], nargs='+', type=int,
help='tpavi模块 add tpavi block in which stages: [0, 1, 2, 3]')
parser.add_argument("--tpavi_vv_flag", action='store_true', default=False, help='视觉自注意visual-visual self-attention')
parser.add_argument("--tpavi_va_flag", action='store_true', default=True, help='视听交叉注意visual-audio cross-attention')
parser.add_argument("--weights", type=str, default='', help='初始训练预训练模型,可以不写path of trained model')
parser.add_argument('--log_dir', default='./train_logs', type=str)大家根据train.sh就可以训练
代码细节
接下来会根据设置你要的视觉特征提取backbone,语音的默认使用vggish特征提取。
if (args.visual_backbone).lower() == "resnet":
from model import ResNet_AVSModel as AVSModel
print('==> Use ResNet50 as the visual backbone...')
elif (args.visual_backbone).lower() == "pvt":
from model import PVT_AVSModel as AVSModel
print('==> Use pvt-v2 as the visual backbone...')
else:
raise NotImplementedError("only support the resnet50 and pvt-v2")数据读取部分:
class MS3Dataset(Dataset):
"""Dataset for multiple sound source segmentation"""
def __init__(self, split='train'):
super(MS3Dataset, self).__init__()
self.split = split
self.mask_num = 5
df_all = pd.read_csv(cfg.DATA.ANNO_CSV, sep=',')
self.df_split = df_all[df_all['split'] == split]
print("{}/{} videos are used for {}".format(len(self.df_split), len(df_all), self.split))
self.img_transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))
])
self.mask_transform = transforms.Compose([
transforms.ToTensor(),
])
def __getitem__(self, index):
df_one_video = self.df_split.iloc[index]
video_name = df_one_video[0]
img_base_path = os.path.join(cfg.DATA.DIR_IMG, video_name)
audio_lm_path = os.path.join(cfg.DATA.DIR_AUDIO_LOG_MEL, self.split, video_name + '.pkl')
mask_base_path = os.path.join(cfg.DATA.DIR_MASK, self.split, video_name)
audio_log_mel = load_audio_lm(audio_lm_path)
# audio_lm_tensor = torch.from_numpy(audio_log_mel)
imgs, masks = [], []
for img_id in range(1, 6):
img = load_image_in_PIL_to_Tensor(os.path.join(img_base_path, "%s.mp4_%d.png"%(video_name, img_id)), transform=self.img_transform)
imgs.append(img)
for mask_id in range(1, self.mask_num + 1):
mask = load_image_in_PIL_to_Tensor(os.path.join(mask_base_path, "%s_%d.png"%(video_name, mask_id)), transform=self.mask_transform, mode='P')
masks.append(mask)
imgs_tensor = torch.stack(imgs, dim=0)
masks_tensor = torch.stack(masks, dim=0)
return imgs_tensor, audio_log_mel, masks_tensor, video_name
def __len__(self):
return len(self.df_split)可以看到,一次读取5张图,我看了视频,都是5秒的,说明作者一次训练一个视频,每个视频每秒的帧和GT和语音合并训练。
for n_iter, batch_data in enumerate(train_dataloader):
imgs, audio, mask, _ = batch_data # [bs, 5, 3, 224, 224], [bs, 5, 1, 96, 64], [bs, 5 or 1, 1, 224, 224]
imgs = imgs.cuda()
audio = audio.cuda()
mask = mask.cuda()
B, frame, C, H, W = imgs.shape
imgs = imgs.view(B * frame, C, H, W)
mask_num = 5
mask = mask.view(B * mask_num, 1, H, W)
audio = audio.view(-1, audio.shape[2], audio.shape[3], audio.shape[4]) # [B*T, 1, 96, 64]
with torch.no_grad():
audio_feature = audio_backbone(audio) # [B*T, 128]
output, v_map_list, a_fea_list = model(imgs, audio_feature) # [bs*5, 1, 224, 224]
loss, loss_dict = IouSemanticAwareLoss(output, mask, a_fea_list, v_map_list, \
sa_loss_flag=args.masked_av_flag, lambda_1=args.lambda_1,
count_stages=args.masked_av_stages, \
mask_pooling_type=args.mask_pooling_type,
threshold=args.threshold_flag, norm_fea=args.norm_fea_flag, \
closer_flag=args.closer_flag, euclidean_flag=args.euclidean_flag,
kl_flag=args.kl_flag)
avg_meter_total_loss.add({'total_loss': loss.item()})
avg_meter_iou_loss.add({'iou_loss': loss_dict['iou_loss']})
avg_meter_sa_loss.add({'sa_loss': loss_dict['sa_loss']})
optimizer.zero_grad()
loss.backward()
optimizer.step()
global_step += 1
if (global_step - 1) % 20 == 0:
train_log = 'Iter:%5d/%5d, Total_Loss:%.4f, iou_loss:%.4f, sa_loss:%.4f, lr: %.4f' % (
global_step - 1, max_step, avg_meter_total_loss.pop('total_loss'),
avg_meter_iou_loss.pop('iou_loss'), avg_meter_sa_loss.pop('sa_loss'),
optimizer.param_groups[0]['lr'])可以看到,训练很简单,先load图像5帧view合并在一起,再获取语音特征,送入模型。然后计算损失和Iou得分。
输入模型的数据分为两部分,图像帧【bs*5, 3, 224, 224】,乘以5意思是每个视频有5帧,第二部分是语音帧,维度相似。
class Pred_endecoder(nn.Module):
# resnet based encoder decoder
def __init__(self, channel=256, config=None, tpavi_stages=[], tpavi_vv_flag=False, tpavi_va_flag=True):
super(Pred_endecoder, self).__init__()
self.cfg = config
self.tpavi_stages = tpavi_stages
self.tpavi_vv_flag = tpavi_vv_flag
self.tpavi_va_flag = tpavi_va_flag
self.resnet = B2_ResNet()
self.relu = nn.ReLU(inplace=True)
self.conv4 = self._make_pred_layer(Classifier_Module, [3, 6, 12, 18], [3, 6, 12, 18], channel, 2048)
self.conv3 = self._make_pred_layer(Classifier_Module, [3, 6, 12, 18], [3, 6, 12, 18], channel, 1024)
self.conv2 = self._make_pred_layer(Classifier_Module, [3, 6, 12, 18], [3, 6, 12, 18], channel, 512)
self.conv1 = self._make_pred_layer(Classifier_Module, [3, 6, 12, 18], [3, 6, 12, 18], channel, 256)
self.path4 = FeatureFusionBlock(channel)
self.path3 = FeatureFusionBlock(channel)
self.path2 = FeatureFusionBlock(channel)
self.path1 = FeatureFusionBlock(channel)
for i in self.tpavi_stages:
setattr(self, f"tpavi_b{i + 1}", TPAVIModule(in_channels=channel, mode='dot'))
print("==> Build TPAVI block...")
self.output_conv = nn.Sequential(
nn.Conv2d(channel, 128, kernel_size=3, stride=1, padding=1),
Interpolate(scale_factor=2, mode="bilinear"),
nn.Conv2d(128, 32, kernel_size=3, stride=1, padding=1),
nn.ReLU(True),
nn.Conv2d(32, 1, kernel_size=1, stride=1, padding=0),
)
if self.training:
self.initialize_weights()
def pre_reshape_for_tpavi(self, x):
# x: [B*5, C, H, W]
_, C, H, W = x.shape
x = x.reshape(-1, 5, C, H, W)
x = x.permute(0, 2, 1, 3, 4).contiguous() # [B, C, T, H, W]
return x
def post_reshape_for_tpavi(self, x):
# x: [B, C, T, H, W]
# return: [B*T, C, H, W]
_, C, _, H, W = x.shape
x = x.permute(0, 2, 1, 3, 4) # [B, T, C, H, W]
x = x.view(-1, C, H, W)
return x
def tpavi_vv(self, x, stage):
# x: visual, [B*T, C=256, H, W]
tpavi_b = getattr(self, f'tpavi_b{stage + 1}')
x = self.pre_reshape_for_tpavi(x) # [B, C, T, H, W]
x, _ = tpavi_b(x) # [B, C, T, H, W]
x = self.post_reshape_for_tpavi(x) # [B*T, C, H, W]
return x
def tpavi_va(self, x, audio, stage):
# x: visual, [B*T, C=256, H, W]
# audio: [B*T, 128]
# ra_flag: return audio feature list or not
tpavi_b = getattr(self, f'tpavi_b{stage + 1}')
audio = audio.view(-1, 5, audio.shape[-1]) # [B, T, 128]
x = self.pre_reshape_for_tpavi(x) # [B, C, T, H, W]
x, a = tpavi_b(x, audio) # [B, C, T, H, W], [B, T, C]
x = self.post_reshape_for_tpavi(x) # [B*T, C, H, W]
return x, a
def _make_pred_layer(self, block, dilation_series, padding_series, NoLabels, input_channel):
return block(dilation_series, padding_series, NoLabels, input_channel)
def forward(self, x, audio_feature=None):
x = self.resnet.conv1(x)
x = self.resnet.bn1(x)
x = self.resnet.relu(x)
x = self.resnet.maxpool(x)
x1 = self.resnet.layer1(x) # BF x 256 x 56 x 56
x2 = self.resnet.layer2(x1) # BF x 512 x 28 x 28
x3 = self.resnet.layer3_1(x2) # BF x 1024 x 14 x 14
x4 = self.resnet.layer4_1(x3) # BF x 2048 x 7 x 7
# print(x1.shape, x2.shape, x3.shape, x4.shape)
conv1_feat = self.conv1(x1) # BF x 256 x 56 x 56
conv2_feat = self.conv2(x2) # BF x 256 x 28 x 28
conv3_feat = self.conv3(x3) # BF x 256 x 14 x 14
conv4_feat = self.conv4(x4) # BF x 256 x 7 x 7
# print(conv1_feat.shape, conv2_feat.shape, conv3_feat.shape, conv4_feat.shape)
feature_map_list = [conv1_feat, conv2_feat, conv3_feat, conv4_feat]
a_fea_list = [None] * 4
if len(self.tpavi_stages) > 0:
if (not self.tpavi_vv_flag) and (not self.tpavi_va_flag):
raise Exception('tpavi_vv_flag and tpavi_va_flag cannot be False at the same time if len(tpavi_stages)>0, \
tpavi_vv_flag is for video self-attention while tpavi_va_flag indicates the standard version (audio-visual attention)')
for i in self.tpavi_stages:
tpavi_count = 0
conv_feat = torch.zeros_like(feature_map_list[i]).cuda()
if self.tpavi_vv_flag:
conv_feat_vv = self.tpavi_vv(feature_map_list[i], stage=i)
conv_feat += conv_feat_vv
tpavi_count += 1
if self.tpavi_va_flag:
conv_feat_va, a_fea = self.tpavi_va(feature_map_list[i], audio_feature, stage=i)
conv_feat += conv_feat_va
tpavi_count += 1
a_fea_list[i] = a_fea
conv_feat /= tpavi_count
feature_map_list[i] = conv_feat # update features of stage-i which conduct TPAVI
conv4_feat = self.path4(feature_map_list[3]) # BF x 256 x 14 x 14
conv43 = self.path3(conv4_feat, feature_map_list[2]) # BF x 256 x 28 x 28
conv432 = self.path2(conv43, feature_map_list[1]) # BF x 256 x 56 x 56
conv4321 = self.path1(conv432, feature_map_list[0]) # BF x 256 x 112 x 112
# print(conv4_feat.shape, conv43.shape, conv432.shape, conv4321.shape)
pred = self.output_conv(conv4321) # BF x 1 x 224 x 224
# print(pred.shape)
return pred, feature_map_list, a_fea_list
def initialize_weights(self):
res50 = models.resnet50(pretrained=False)
resnet50_dict = torch.load(self.cfg.TRAIN.PRETRAINED_RESNET50_PATH)
res50.load_state_dict(resnet50_dict)
pretrained_dict = res50.state_dict()
# print(pretrained_dict.keys())
all_params = {}
for k, v in self.resnet.state_dict().items():
if k in pretrained_dict.keys():
v = pretrained_dict[k]
all_params[k] = v
elif '_1' in k:
name = k.split('_1')[0] + k.split('_1')[1]
v = pretrained_dict[name]
all_params[k] = v
elif '_2' in k:
name = k.split('_2')[0] + k.split('_2')[1]
v = pretrained_dict[name]
all_params[k] = v
assert len(all_params.keys()) == len(self.resnet.state_dict().keys())
self.resnet.load_state_dict(all_params)
print(f'==> Load pretrained ResNet50 parameters from {self.cfg.TRAIN.PRETRAINED_RESNET50_PATH}')
网络部分很简单,模型的定义没什么亮点,我们看forward里面的代码:
def forward(self, x, audio_feature=None): # 输入图像帧和音频梅尔图经过vggish 的特征图。
x = self.resnet.conv1(x)
x = self.resnet.bn1(x)
x = self.resnet.relu(x)
x = self.resnet.maxpool(x)
x1 = self.resnet.layer1(x) # BF x 256 x 56 x 56
x2 = self.resnet.layer2(x1) # BF x 512 x 28 x 28
x3 = self.resnet.layer3_1(x2) # BF x 1024 x 14 x 14
x4 = self.resnet.layer4_1(x3) # BF x 2048 x 7 x 7 先进行resnet特征提取
# print(x1.shape, x2.shape, x3.shape, x4.shape)
conv1_feat = self.conv1(x1) # BF x 256 x 56 x 56 维度转换一下
conv2_feat = self.conv2(x2) # BF x 256 x 28 x 28
conv3_feat = self.conv3(x3) # BF x 256 x 14 x 14
conv4_feat = self.conv4(x4) # BF x 256 x 7 x 7
# print(conv1_feat.shape, conv2_feat.shape, conv3_feat.shape, conv4_feat.shape)
feature_map_list = [conv1_feat, conv2_feat, conv3_feat, conv4_feat]
a_fea_list = [None] * 4
if len(self.tpavi_stages) > 0: # 做几次tpavi模块,论文中是4次
if (not self.tpavi_vv_flag) and (not self.tpavi_va_flag):
raise Exception('tpavi_vv_flag and tpavi_va_flag cannot be False at the same time if len(tpavi_stages)>0, \
tpavi_vv_flag is for video self-attention while tpavi_va_flag indicates the standard version (audio-visual attention)')
for i in self.tpavi_stages:
tpavi_count = 0
conv_feat = torch.zeros_like(feature_map_list[i]).cuda()
if self.tpavi_vv_flag:
conv_feat_vv = self.tpavi_vv(feature_map_list[i], stage=i)
conv_feat += conv_feat_vv
tpavi_count += 1
if self.tpavi_va_flag:
# tpavi模块
conv_feat_va, a_fea = self.tpavi_va(feature_map_list[i], audio_feature, stage=i)
conv_feat += conv_feat_va
tpavi_count += 1
a_fea_list[i] = a_fea
conv_feat /= tpavi_count
feature_map_list[i] = conv_feat # update features of stage-i which conduct TPAVI
conv4_feat = self.path4(feature_map_list[3]) # BF x 256 x 14 x 14 # 解码
conv43 = self.path3(conv4_feat, feature_map_list[2]) # BF x 256 x 28 x 28
conv432 = self.path2(conv43, feature_map_list[1]) # BF x 256 x 56 x 56
conv4321 = self.path1(conv432, feature_map_list[0]) # BF x 256 x 112 x 112
# print(conv4_feat.shape, conv43.shape, conv432.shape, conv4321.shape)
pred = self.output_conv(conv4321) # BF x 1 x 224 x 224
# print(pred.shape)
return pred, feature_map_list, a_fea_list可以看到要经过一个TPAVI模块,是蛮复杂的模块:
class TPAVIModule(nn.Module):
def __init__(self, in_channels, inter_channels=None, mode='dot',
dimension=3, bn_layer=True):
"""
args:
in_channels: original channel size (1024 in the paper)
inter_channels: channel size inside the block if not specifed reduced to half (512 in the paper)
mode: supports Gaussian, Embedded Gaussian, Dot Product, and Concatenation
dimension: can be 1 (temporal), 2 (spatial), 3 (spatiotemporal)
bn_layer: whether to add batch norm
"""
super(TPAVIModule, self).__init__()
assert dimension in [1, 2, 3]
if mode not in ['gaussian', 'embedded', 'dot', 'concatenate']:
raise ValueError('`mode` must be one of `gaussian`, `embedded`, `dot` or `concatenate`')
self.mode = mode
self.dimension = dimension
self.in_channels = in_channels
self.inter_channels = inter_channels
# the channel size is reduced to half inside the block
if self.inter_channels is None:
self.inter_channels = in_channels // 2
if self.inter_channels == 0:
self.inter_channels = 1
## add align channel
self.align_channel = nn.Linear(128, in_channels)
self.norm_layer=nn.LayerNorm(in_channels)
# assign appropriate convolutional, max pool, and batch norm layers for different dimensions
if dimension == 3:
conv_nd = nn.Conv3d
max_pool_layer = nn.MaxPool3d(kernel_size=(1, 2, 2))
bn = nn.BatchNorm3d
elif dimension == 2:
conv_nd = nn.Conv2d
max_pool_layer = nn.MaxPool2d(kernel_size=(2, 2))
bn = nn.BatchNorm2d
else:
conv_nd = nn.Conv1d
max_pool_layer = nn.MaxPool1d(kernel_size=(2))
bn = nn.BatchNorm1d
# function g in the paper which goes through conv. with kernel size 1
self.g = conv_nd(in_channels=self.in_channels, out_channels=self.inter_channels, kernel_size=1)
if bn_layer:
self.W_z = nn.Sequential(
conv_nd(in_channels=self.inter_channels, out_channels=self.in_channels, kernel_size=1),
bn(self.in_channels)
)
nn.init.constant_(self.W_z[1].weight, 0)
nn.init.constant_(self.W_z[1].bias, 0)
else:
self.W_z = conv_nd(in_channels=self.inter_channels, out_channels=self.in_channels, kernel_size=1)
nn.init.constant_(self.W_z.weight, 0)
nn.init.constant_(self.W_z.bias, 0)
# define theta and phi for all operations except gaussian
if self.mode == "embedded" or self.mode == "dot" or self.mode == "concatenate":
self.theta = conv_nd(in_channels=self.in_channels, out_channels=self.inter_channels, kernel_size=1)
self.phi = conv_nd(in_channels=self.in_channels, out_channels=self.inter_channels, kernel_size=1)
if self.mode == "concatenate":
self.W_f = nn.Sequential(
nn.Conv2d(in_channels=self.inter_channels * 2, out_channels=1, kernel_size=1),
nn.ReLU()
)
def forward(self, x, audio=None):
"""
args:
x: (N, C, T, H, W) for dimension=3; (N, C, H, W) for dimension 2; (N, C, T) for dimension 1
audio: (N, T, C)
"""
audio_temp = 0
batch_size, C = x.size(0), x.size(1)
if audio is not None:
# print('==> audio.shape', audio.shape)
H, W = x.shape[-2], x.shape[-1]
audio_temp = self.align_channel(audio) # [bs, T, C]
audio = audio_temp.permute(0, 2, 1) # [bs, C, T]
audio = audio.unsqueeze(-1).unsqueeze(-1) # [bs, C, T, 1, 1]
audio = audio.repeat(1, 1, 1, H, W) # [bs, C, T, H, W]
else:
audio = x
# (N, C, THW)
g_x = self.g(x).view(batch_size, self.inter_channels, -1) # [bs, C, THW]
# print('g_x.shape', g_x.shape)
# g_x = x.view(batch_size, C, -1) # [bs, C, THW]
g_x = g_x.permute(0, 2, 1) # [bs, THW, C]
if self.mode == "gaussian":
theta_x = x.view(batch_size, self.in_channels, -1)
phi_x = audio.view(batch_size, self.in_channels, -1)
theta_x = theta_x.permute(0, 2, 1)
f = torch.matmul(theta_x, phi_x)
elif self.mode == "embedded" or self.mode == "dot":
theta_x = self.theta(x).view(batch_size, self.inter_channels, -1) # [bs, C', THW]
phi_x = self.phi(audio).view(batch_size, self.inter_channels, -1) # [bs, C', THW]
theta_x = theta_x.permute(0, 2, 1) # [bs, THW, C']
f = torch.matmul(theta_x, phi_x) # [bs, THW, THW]
elif self.mode == "concatenate":
theta_x = self.theta(x).view(batch_size, self.inter_channels, -1, 1)
phi_x = self.phi(audio).view(batch_size, self.inter_channels, 1, -1)
h = theta_x.size(2)
w = phi_x.size(3)
theta_x = theta_x.repeat(1, 1, 1, w)
phi_x = phi_x.repeat(1, 1, h, 1)
concat = torch.cat([theta_x, phi_x], dim=1)
f = self.W_f(concat)
f = f.view(f.size(0), f.size(2), f.size(3))
if self.mode == "gaussian" or self.mode == "embedded":
f_div_C = F.softmax(f, dim=-1)
elif self.mode == "dot" or self.mode == "concatenate":
N = f.size(-1) # number of position in x
f_div_C = f / N # [bs, THW, THW]
y = torch.matmul(f_div_C, g_x) # [bs, THW, C]
# contiguous here just allocates contiguous chunk of memory
y = y.permute(0, 2, 1).contiguous() # [bs, C, THW]
y = y.view(batch_size, self.inter_channels, *x.size()[2:]) # [bs, C', T, H, W]
W_y = self.W_z(y) # [bs, C, T, H, W]
# residual connection
z = W_y + x # # [bs, C, T, H, W]
# add LayerNorm
z = z.permute(0, 2, 3, 4, 1) # [bs, T, H, W, C]
z = self.norm_layer(z)
z = z.permute(0, 4, 1, 2, 3) # [bs, C, T, H, W]
return z, audio_temp代码看着复杂,其实是作者做了很多的模块选择以及代码的通道转换,实际最后的操作就是几个1* 1 *1 3D卷积,咱不用想也知道,3d卷积来做时序的特征提取。然后做一些累乘累加操作。
if dimension == 3:
conv_nd = nn.Conv3d
max_pool_layer = nn.MaxPool3d(kernel_size=(1, 2, 2))
bn = nn.BatchNorm3d
elif dimension == 2:
conv_nd = nn.Conv2d
max_pool_layer = nn.MaxPool2d(kernel_size=(2, 2))
bn = nn.BatchNorm2d
else:
conv_nd = nn.Conv1d
max_pool_layer = nn.MaxPool1d(kernel_size=(2))
bn = nn.BatchNorm1d最后经过几个解码器,将特征图转为一维度:
conv4_feat = self.path4(feature_map_list[3]) # BF x 256 x 14 x 14
conv43 = self.path3(conv4_feat, feature_map_list[2]) # BF x 256 x 28 x 28
conv432 = self.path2(conv43, feature_map_list[1]) # BF x 256 x 56 x 56
conv4321 = self.path1(conv432, feature_map_list[0]) # BF x 256 x 112 x 112
# print(conv4_feat.shape, conv43.shape, conv432.shape, conv4321.shape)
pred = self.output_conv(conv4321) # BF x 1 x 224 x 224可以看到【BF x 1 x 224 x 224】这个1维度的变化,就是网络的一个回归预测部分。最后输出的bs *frame 张1 * 224 *224 的图,就是我们最后输出的图(经过argmax等操作后显示成0,1分类),就变成了预测的mask图,
大家可以看我的预测图:

测试
先看看ms3_meta_data.csv 的数据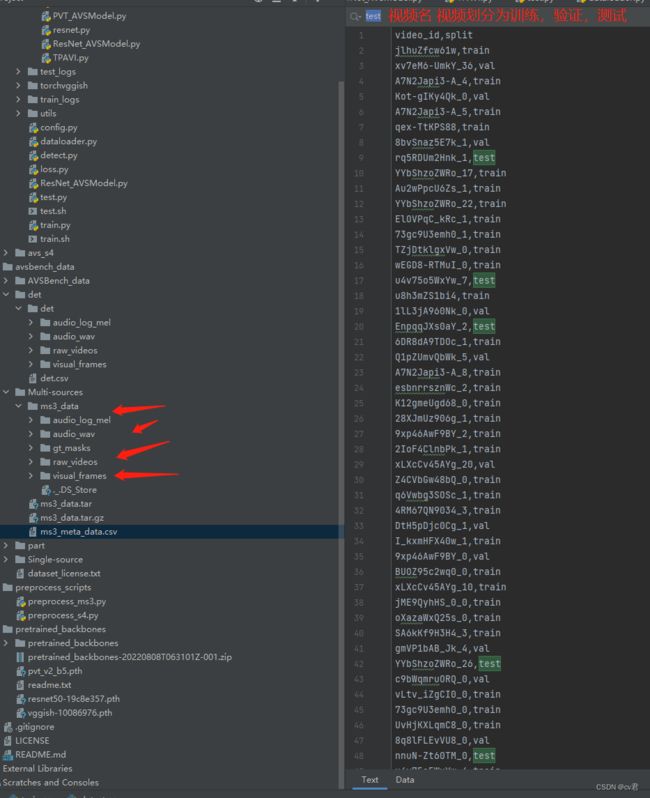
可以看到,一共有三份数据:训练、验证和测试集,我们训练好模型后,可以使用test.py 进行测试,测试效果会放在test_log文件夹。会去测试,test文件夹里的数据。运行测试代码,改一下训练好的模型路径就可以看到结果。
测试某个视频
点开avsbench_data/det/det的raw_videos/里面放你想测试的videos,建议5s,因为要切5帧,除非你改代码。
然后运行preprocess_scripts/preprocess_ms3.py,这是为了生成语音的梅尔图,和切帧,会保存到raw_videos同级。
接着运行detect.py(在train.py 同级)就可以针对你的视频,推理了。
实时检测,这个代码我还在写,稍等。
代码所有的链接(本地文件不能上传,只能提供原始github):https://github.com/OpenNLPLab/AVSBench
最后
近期我会录制视频,过一遍原理和代码和训练推理,大家关注一下~