关于两种PID算法(位置型和增量式)的linux下的C++工程实现
网上有很多关于这两种控制算法的实现,但是大多基于c语言,而且用的是c语言中的结构体,看起来比较繁琐。所以我利用c++面向对象的结构以及STL中vector容器来编写两种算法,看起来简洁多了。在编写的过程中,更深刻理解了如何在实际工程中运用PID控制算法。
话不多说,先上代码https://github.com/JackJu-HIT/PID。
关于两种算法的原理,我直接粘贴我们老师上课的课件图片了,自己打字太费劲!
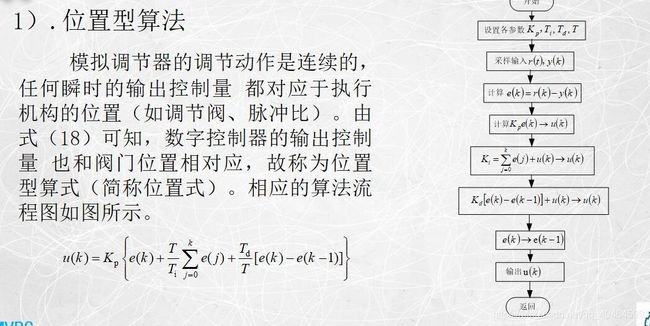
上述就是位置型pid算法,核心就是u(t)=kperror(t)+ki(sum(error))+kd(error(t)-error(t-1)),积分离散化就是求和,微分求和就是查分,这么理解就可以,如果你要是想理解比例、微分、积分环节对系统会产生什么影响啊,上升时间、超调量、稳定裕度等指标,建议你最好从连续系统理解,类似时域分析法、频域分析法、根轨迹之类的,具体参见自动控制原理即可。
同样增量型的pid算法,就是从位置型推出来的,你把u(k)-u(k-1)化简一下就能得到下图那个式子。还是盗用老师课件的图:

简单说增量型pid就是:u(t)-u(t-1)=kp*(error(t)-error(t-1))+ki*(error(t))+kd*(error(t)-2*error(t-1)+error(t-2))。增量型比位置型好在哪里?我的理解就是好就好在每次积分环节不用每次都累计的计算,每次都要求一次和,浪费计算资源。还有就是有些情况,我们只要知道当前控制量与上一次变幻多少即可。
那么现在让我们分析分系源码吧:
我们假设被控对象传递函数G(S)=Y(S)/U(S)=1/(2S+1),变成时间域就是 2y‘+y=u,那么我们写的是离散pid,故需要进行离散化处理,2(y(k)-y(k-1))+y(k-1)=u,整理得到,y(k)=0.5(u(k)+y(k-1)) (1).这里要注意,u是由pid输出的信号控制的。
for (int i = 0; i < 200; i++)
{
y=0.5*(y+u);//模型
err=x_ref-y;
pid.error=err;
pid.PID_function(1,0.1,0);
u=pid.u_output;
y_output.push_back(y);
}这一块是主函数了,调用pid进行控制了。里面的被控对象模型用的就是(1)式。
//PID
class PID
{
public:
double error;
double pre_error=0;
double error_sum=0;
double u_output;
void PID_function(double kp,double ki,double kd); //位置式pid算法
//void PID_
PID();
~PID();
};
void PID::PID_function(double kp,double ki,double kd)
{
error_sum+=error;
u_output=kp*error+ki*error_sum+kd*(error-pre_error);
pre_error=error;
std::cout<<"error:"<这一部分就是代码核心的部分。位置型pid具体实现,具体算法参见代码。
void PID::PID_function(double kp,double ki,double kd)
{
if(i==1)
{
pre_error.push_back(0);
pre_error.push_back(0);
std::cout<这一部分是增量型pid的算法核心部分的代码,具体实现过程见代码,写的很清楚。最后一部分就是显示绘制出曲线的部分了。
/*pid校正后(闭环)*/
plt::subplot(2,2,1);
plt::title("PID");
plt::plot(y_output);
/*****pid矫正前(开环)****/
plt::subplot(2,2,2);
plt::title("orginal");
plt::plot(y_orgin_output);
plt::show();这一部分就是绘图部分,绘制了加控制器和不加控制器两种情况,代码看起来像matlab哈,也有点像python。
到这里,你就学完了两种经典PID控制算法啦,具体的代码,你参见开头给出我的github网址上去下载。
如果你觉得我写的不错,就点赞、关注我吧,第一次系统介绍一个算法.后面会不定时的介绍些自动驾驶中的算法及其linux下C++工程实现。