百度飞桨目标检测教程一:目标检测任务综述
百度飞桨目标检测教程一:目标检测任务综述
百度飞桨目标检测7日打卡训练营:https://aistudio.baidu.com/aistudio/course/introduce/1617
百度飞桨目标检测教程二:RCNN系列论文解析
https://blog.csdn.net/phosphenesvision/article/details/108904340
百度飞桨目标检测教程三:YOLO系列论文解析
https://blog.csdn.net/phosphenesvision/article/details/108904300
百度飞桨目标检测教程四:Anchor-Free算法
https://blog.csdn.net/phosphenesvision/article/details/108898106
目标检测的定义
图像分类:分类图像中的物体
目标检测:在图像分类的基础之上还要将图像中的物体的位置标注出来。
具有广泛的应用且存在一些问题。
- 环境影响:光照,模糊。
- 密集物体,遮挡重叠物体。
- 多尺度:大目标物体,小目标物体。
- 样本较少的情况。
- 旋转框。
- 在小算例上如何保证实时性。
- 其他问题。
目标检测的发展历程
[Object detection in 20 years: A survey](https://scholar.paodekuaiweixinqun.com/get_detail?title=Object detection in 20 years%3A A survey&author=Z Zou%2C Z Shi%2C Y Guo%2C J Ye - arXiv preprint arXiv%3A1905.05055%2C 2019 - arxiv.org&url=https%3A//arxiv.org/abs/1905.05055&did=YM4mXxIsmBAJ)
2019 IEEE TPAMI
引用次数:95
作者一:Zhengxia Zou ([email protected]) University of Michigan, USA
作者二:Jieping Ye ([email protected]) Beihang University, China

传统算法
总述
传统算法综述:
- 区域选择(滑动窗口)
- 特征提取(SIFT HOG)
- 区域分类(SVM Adaboost)
- 后处理(NMS过滤框)
弊端:算例要求高,适应性差,解决问题有限等等
深度学习方法
请参看其他博客
百度飞桨目标检测教程二:RCNN系列论文解析
https://blog.csdn.net/phosphenesvision/article/details/108904340
Anchor-based 两阶段目标检测算法 RCNN系列论文解析
涉及论文:RCNN FastRCNN FasterRCNN FPN CascadeRCNN LibraRCNN
百度飞桨目标检测教程三:YOLO系列论文解析
https://blog.csdn.net/phosphenesvision/article/details/108904300
Anchor-based 单阶段目标检测算法 YOLO系列论文解析
涉及论文:YOLOv1 YOLOv2 YOLOv3 PPYOLO
百度飞桨目标检测教程四:Anchor-Free算法
https://blog.csdn.net/phosphenesvision/article/details/108898106
Anchor-Free 算法解析
Anchor-Free 也可以细分为两种策略
第一种keypoint-based 涉及论文:CornerNet CornerNet Lite
第一种center-based 涉及论文:FCOS CenterNet TTFNet
术语解释
- BBox = BoundingBox = 边界框,所有的框物体的框都可以称之为边界框,边界框的两种表示方法,左上角点和右下角点的组合,中心点和宽高的组合。
- Anchor = PriorBox = 锚框,认为设定的不同长宽比的先验框。
- RoI = Proposal = 候选区域 = 感兴趣区域,初步提取出来的可能包含物体的区域。
评价标准
-
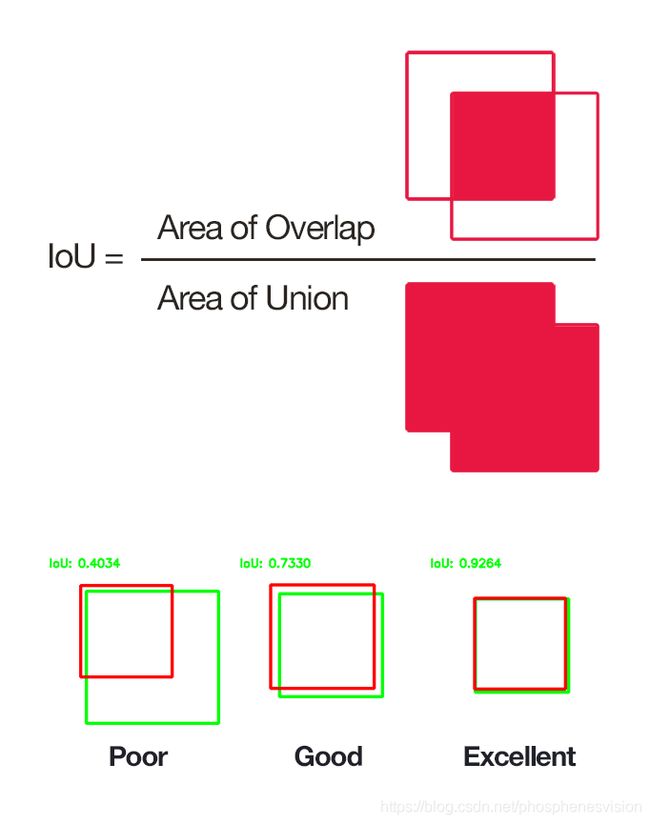
IoU(Intersaction over Union):交并比,评价预测框与真实框的质量,两个框交的面积/两个框并的面积,IoU越大,说明预测框越接近真实框。
-
mAP,衡量模型好坏的一个指标,这个计算有点复杂。
-
速度评价标准FPS,这个很好理解,是指每秒钟可以检测的图像的个数,FPS越高,则意味着网络的速度性能越好。
mAP
ppt1
首先介绍精确率和召回率。
预测框和真实标签的重合程度IoU则反映了预测值的准确性,一般认为IoU大于0.5时即视为预测正确,当然也可以设置其他阈值。一个网络会预测出很多预测框来,而每一个预测框都计算一个IoU值,在求得这些IoU值之后,需要计算出精确率和召回率,精确率的定义是所有预测为正的包围框中预测正确的个数有多少,预测为正指的是预测这个包围框包含某类物体,而召回率的定义是在所有应该预测为正的包围框中有多少预测了出来。

ppt2

更为直观的理解精确度是IoU框的交集与预测框的比值,而召回率是IoU框的交际与真实框的比值,IoU则是交集与并集的比值。在明确精确度与召回率的定义之后,我们每计算一个包围框的IOU的时候都要更新精确度与召回率,最终得到PR曲线,而平均精度AP则是计算这个曲线包围的面积,mAP是指所有类别的AP取平均,而值得注意的一点是,我们在计算PR曲线面积的时候,采用了一种向上补齐的办法方便计算,即随着召回率的增加应该保证曲线是非增的。
ppt3
https://towardsdatascience.com/breaking-down-mean-average-precision-map-ae462f623a52

在明确精确度与召回率的定义之后,我们每计算一个包围框的IoU的时候都要更新精确度与召回率,最终得到PR曲线,而平均精度AP则是计算这个曲线包围的面积,mAP是指所有类别的AP取平均,而值得注意的一点是,我们在计算PR曲线面积的时候,采用了一种向上补齐的办法方便计算,即随着召回率的增加应该保证曲线是非增的。
目标检测数据集
