基于Opencv的卡尺找线
- 首先, 边缘点的提取主要学习的是VisionPro的CogCaliperTool工具的原理。
- 之后,获得边缘点集之后,用RANSAC算法把异常点筛选出来。RANSAC的算法原理参考RANSAC算法(附RANSAC直线拟合C++与Python版本),有做小小地修改,根据以下公式计算迭代次数: k = l o g ( 1 − p ) l o g ( 1 − w n ) k=\frac{log(1-p)}{log(1-w^n)} k=log(1−wn)log(1−p)。
void CCaliperGraphics::RansacLineFiler(const vector<Point2d>& points,vector<Point2d>&vpdExceptPoints, double sigma)
{
unsigned int n = points.size();
if (n < 2)
{
return;
}
RNG random;
double bestScore = -1.;
vector<Point2d>vpdTemp;
int iterations = log(1 - 0.99) / (log(1 - (1.00 / n)))*10;
for (int k = 0; k < iterations; k++)
{
int i1 = 0, i2 = 0;
while (i1 == i2)
{
i1 = random(n);
i2 = random(n);
}
const cv::Point2d& p1 = points[i1];
const cv::Point2d& p2 = points[i2];
Point2d vectorP21 = p2 - p1;
vectorP21 *= 1. / norm(vectorP21);
double score = 0;
vpdTemp.clear();
for (int i = 0; i < n; i++)
{
Point2d vectorPi1 = points[i] - p1;
double d = vectorPi1.y * vectorP21.x - vectorPi1.x * vectorP21.y;//calculate the cos�� of the two vectors.
if (fabs(d) < sigma)
{
score += 1;
}
else
{
vpdTemp.push_back(points[i]);
}
}
if (score > bestScore)
{
bestScore = score;
vpdExceptPoints = vpdTemp;
}
}
}
- 最后,用fitLine去做直线拟合。
最终效果:
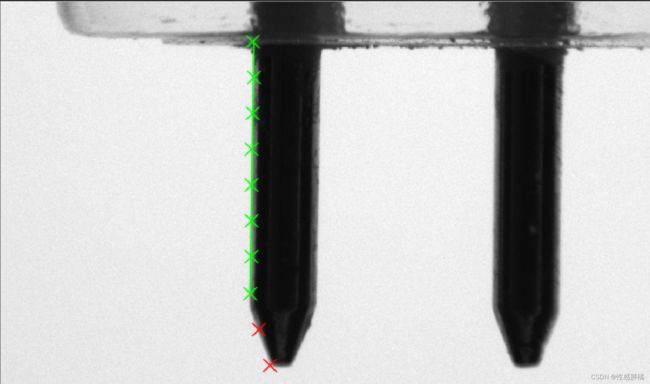
用ImageWatch放大图片,
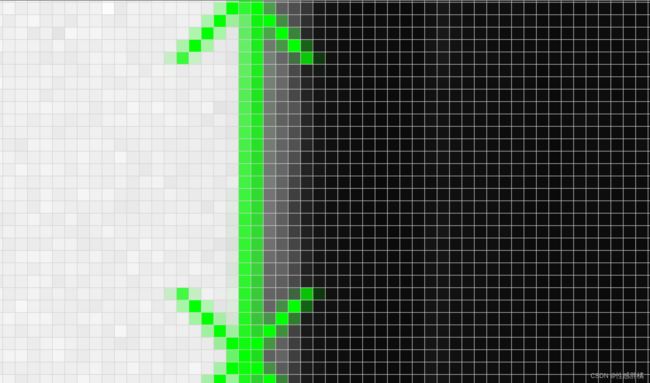
用opencv的trackbar和mouse事件简易地实现了了卡尺的拖动和编辑:
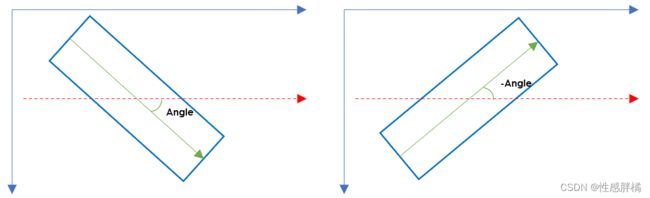
卡尺的实现比较麻烦的是采样方向,我的定义如下图,根据向量的夹角公式计算线段与X轴的夹角,同样反过来,只要有线段中心,方向以及长度,就能计算出线段的起点和终点。
static double GetAngleVecWithX(Point2d p1,Point2d p2)
{
if (p1 == p2)
{
return -1;
}
Point2d vector = p2 - p1;
if (vector.x == 0)
{
if (vector.y > 0)
{
return 90;
}
else
{
return -90;
}
}
double angle = to_degree(acos(pow(vector.x, 2) / (vector.x * sqrt(pow(vector.x, 2) + pow(vector.y, 2)))));
if (p1.y > p2.y)
{
angle = -angle;
}
return angle;
}
此外,我觉得自带的drawArrow不是很好用,就利用RotateRect重新写了一个。画十字架也是类似的原理。
static void DrawArrow(Mat& inputMat, Point2d p1, Point2d p2, int dSize, Scalar color, int nThickness = 1)
{
if (inputMat.empty())
{
return;
}
double dK = ((double)p2.y - (double)p1.y) / ((double)p2.x - (double)p1.x);
double dAngle = atan(dK) * 180 / PI;
line(inputMat, p1, p2, color, nThickness, LINE_AA);
RotatedRect rotateRect(p2, Size(dSize, dSize * 0.5), dAngle);
Point2f rectPoints[4];
rotateRect.points(rectPoints);
if ((dAngle >= 0 && p1.x <= p2.x) || (dAngle < 0 && p1.x <= p2.x))
{
line(inputMat, p2, rectPoints[0], color, nThickness, LINE_AA);
line(inputMat, p2, rectPoints[1], color, nThickness, LINE_AA);
}
else
{
line(inputMat, p2, rectPoints[2], color, nThickness, LINE_AA);
line(inputMat, p2, rectPoints[3], color, nThickness, LINE_AA);
}
}
基于opencv的卡尺找线 源码
卡尺找圆也是一样的原理,效果在这里基于opencv的卡尺找圆