安全帽佩戴检测——从数据处理、训练数据到模型部署落地(带有数据集、训练代码,可使用GPU的C++模型部署代码)
前言
1.这是一个检测是否佩戴安全帽的完整项目,包含了数据集,训练代码,检测模型代码,转换模型与如何部署模型并应用到项目上的完整过程。
2.训练和开发环境是win10,显卡RTX3080;cuda10.2,cudnn7.1;OpenCV4.5;yolov5用的是5s的模型,2020年8月13日的发布v3.0这个版本; ncnn版本是20210525;C++ IDE vs2019,Anaconda 3.5。
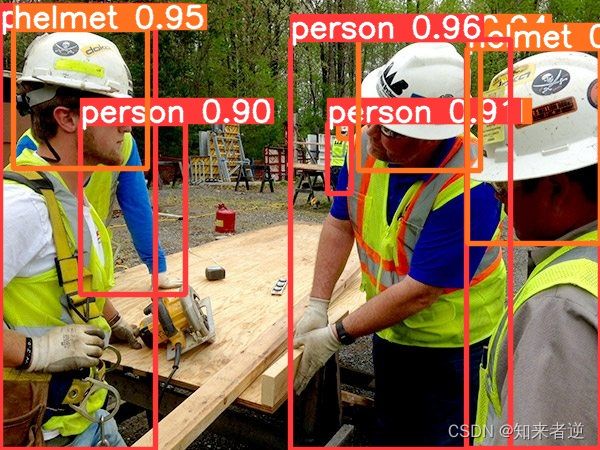
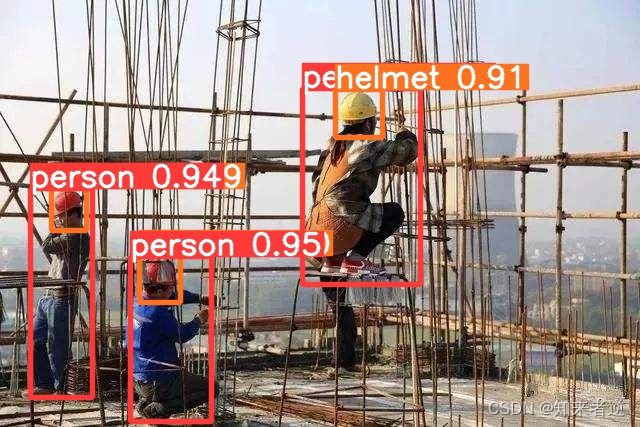
3.实现的效果:




一.环境安装
1.首先要安装anaconda环境,我这里用的是Anaconda 3.5。
2.启动环境,尽量以管理员身份运行环境。
3. 创建环境
conda create --name yolov5 python=3.7
activate yolov5
2.安装依赖
git clone https://github.com/ultralytics/yolov5.git
cd yolov5
pip install -r requirements.txt
或者
git clone https://github.com/ultralytics/yolov5.git
cd yolov5
conda install pytorch torchvision cudatoolkit=10.2 -c pytorch
pip install cython matplotlib tqdm opencv-python tensorboard scipy pillow onnx pyyaml pandas seaborn
二、数据处理
1.标注数据
这里要判断三种形态,[人体]、[佩戴安全帽人的头部]、[没有佩戴安全帽的人头部]三个类别,使用的标注工具是labelImg,是按VOC2007数据标注格式进行标注的。
只标注佩戴在头上的安全帽,而且连着头部一起标注,拿在手中或者放在地方的不标注。
2.处理数据
标注的数据格式是voc,但这里用的yolo,要把数据转换成yolo的txt格式并分好训练集与测试集。
使用python脚本处理数据的generate_txt.py
import os
import glob
import argparse
import random
import xml.etree.ElementTree as ET
from PIL import Image
from tqdm import tqdm
def get_all_classes(xml_path):
xml_fns = glob.glob(os.path.join(xml_path, '*.xml'))
class_names = []
for xml_fn in xml_fns:
tree = ET.parse(xml_fn)
root = tree.getroot()
for obj in root.iter('object'):
cls = obj.find('name').text
class_names.append(cls)
return sorted(list(set(class_names)))
def convert_annotation(img_path, xml_path, class_names, out_path):
output = []
im_fns = glob.glob(os.path.join(img_path, '*.jpg'))
for im_fn in tqdm(im_fns):
if os.path.getsize(im_fn) == 0:
continue
xml_fn = os.path.join(xml_path, os.path.splitext(os.path.basename(im_fn))[0] + '.xml')
if not os.path.exists(xml_fn):
continue
img = Image.open(im_fn)
height, width = img.height, img.width
tree = ET.parse(xml_fn)
root = tree.getroot()
anno = []
xml_height = int(root.find('size').find('height').text)
xml_width = int(root.find('size').find('width').text)
if height != xml_height or width != xml_width:
print((height, width), (xml_height, xml_width), im_fn)
continue
for obj in root.iter('object'):
cls = obj.find('name').text
cls_id = class_names.index(cls)
xmlbox = obj.find('bndbox')
xmin = int(xmlbox.find('xmin').text)
ymin = int(xmlbox.find('ymin').text)
xmax = int(xmlbox.find('xmax').text)
ymax = int(xmlbox.find('ymax').text)
cx = (xmax + xmin) / 2.0 / width
cy = (ymax + ymin) / 2.0 / height
bw = (xmax - xmin) * 1.0 / width
bh = (ymax - ymin) * 1.0 / height
anno.append('{} {} {} {} {}'.format(cls_id, cx, cy, bw, bh))
if len(anno) > 0:
output.append(im_fn)
with open(im_fn.replace('.jpg', '.txt'), 'w') as f:
f.write('\n'.join(anno))
random.shuffle(output)
train_num = int(len(output) * 0.9)
with open(os.path.join(out_path, 'train.txt'), 'w') as f:
f.write('\n'.join(output[:train_num]))
with open(os.path.join(out_path, 'val.txt'), 'w') as f:
f.write('\n'.join(output[train_num:]))
def parse_args():
parser = argparse.ArgumentParser('generate annotation')
parser.add_argument('--img_path', type=str, help='input image directory')
parser.add_argument('--xml_path', type=str, help='input xml directory')
parser.add_argument('--out_path', type=str, help='output directory')
args = parser.parse_args()
return args
if __name__ == '__main__':
args = parse_args()
class_names = get_all_classes(args.xml_path)
print(class_names)
convert_annotation(args.img_path, args.xml_path, class_names, args.out_path)
运行python脚本:
python generate_txt.py --img_path data/XXXXX/JPEGImages --xml_path data/XXXXX/Annotations --out_path data/XXXXX
运行之后会自动转换成归一化后的txt格式坐标,并在指定目录下能成train.txt 和val.txt这两个训练要用到的txt文件。
三、训练模型
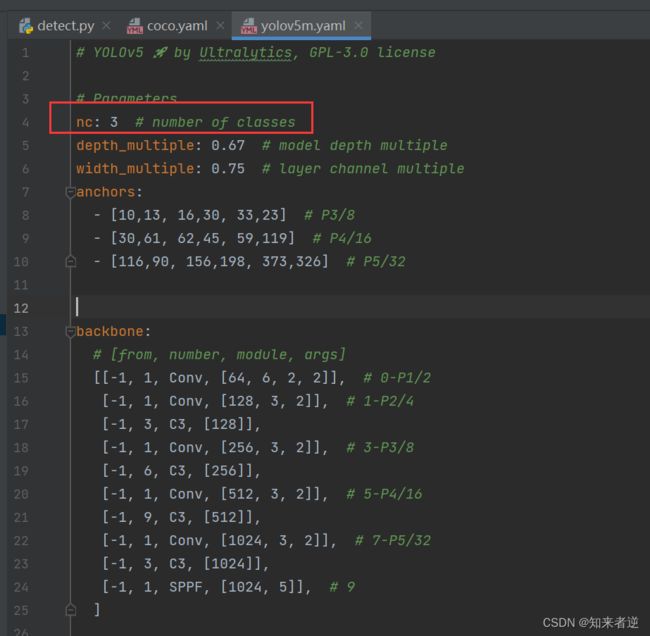
1.这里使用的模型是比s大一些,精度更好一些的m模型,model/yolov5m.yaml,更改nc数目。
2.在data目录下添加一个复制coco.yaml重新命名为helmet.yaml的训练数据配置文件。
```markup
# download command/URL (optional)
download: bash data/scripts/get_voc.sh
# 训练集txt与验证集txt路径
train: data/train.txt
val: data/val.txt
# 总类别数
nc: 3
# 类名
names: ['person', 'head', 'helmet']
3.训练参数
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='yolov5s.pt', help='initial weights path') # 权重文件,是否在使用预训练权重文件
parser.add_argument('--cfg', type=str, default='', help='model.yaml path') # 网络配置文件
parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path') # 训练数据集目录
parser.add_argument('--hyp', type=str, default='data/hyp.scratch.yaml', help='hyperparameters path') #超参数配置文件
parser.add_argument('--epochs', type=int, default=300) # 训练迭代次数
parser.add_argument('--batch-size', type=int, default=32, help='total batch size for all GPUs') # batch-size大小
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes') # 训练图像大小
parser.add_argument('--rect', action='store_true', help='rectangular training') #矩形训练
parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training') # 是否接着上一次的日志权重继续训练
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint') # 不保存
parser.add_argument('--notest', action='store_true', help='only test final epoch') # 不测试
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters') #超参数范围
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training') #是否缓存图像
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu') # 用GPU或者CPU进行训练
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%') #是否多尺度训练
parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset') # 是否一个类别
parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer') # 优化器先择
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
parser.add_argument('--log-imgs', type=int, default=16, help='number of images for W&B logging, max 100')
parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers') #win不能改,win上改不改都容易崩
parser.add_argument('--project', default='runs/train', help='save to project/name')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
opt = parser.parse_args()
4.训练命令
- 单卡:
python train.py --cfg models/yolov5s.yaml --data data/ODID.yaml --hyp data/hyps/hyp.scratch.yaml --epochs 100 --multi-scale --device 0
- 多卡:
python train.py --cfg models/yolov5s.yaml --data data/ODID.yaml --hyp data/hyps/hyp.scratch.yaml --epochs 100 --multi-scale --device 0,1
四、模型测试
1.测试模型
python detect.py --source TestImagesPath --weights ./weights/yolov5m.pt
2.输出检测的结果,检测一张图像大概在1左右。



五、模型部署
1.转换模型
部署模型有很多种选择,部署语言可选C++或者python都可以,推理框架可以选择onnxruntime,libtorch,mnn,ncnn等,这里我使用我比较熟悉的C++与NCNN。
转换模型
python models/export.py --weights weights/yolov5m.pt --img 640 --batch 1
会生成yolov5m.onnx模型,onnx模型可以使用onnxruntime进行推理,也可以使用opencv的dnn进行推理。
2.转ncnn模型。
模型简化,模型简化我这里使用的还是旧的0.36版本,我试过用最新的简化版本,简化出来的模型还是存在一堆的带onnx前缀的op,在onnxruntime和转ncnn之后完全无法进行推理,搞了半天时间没有搞定直接放弃。onnx-simplifier:https://github.com/daquexian/onnx-simplifier
onnx转ncnn模型
onnx2ncnn yolov5s-sim.onnx yolov5s.param yolov5s.bin
- onnx转为 ncnn 模型,会输出很多 Unsupported slice step!,这是focus模块转换的报错.
这里可以直接参考nihui大佬的知乎文章对着改就成了,文章地址:https://zhuanlan.zhihu.com/p/275989233 。
3.NCNN推理代码,动态注册了YoloV5Focus层。
#include "YoloV5Detect.h"
class YoloV5Focus : public ncnn::Layer
{
public:
YoloV5Focus()
{
one_blob_only = true;
}
virtual int forward(const ncnn::Mat& bottom_blob, ncnn::Mat& top_blob, const ncnn::Option& opt) const
{
int w = bottom_blob.w;
int h = bottom_blob.h;
int channels = bottom_blob.c;
int outw = w / 2;
int outh = h / 2;
int outc = channels * 4;
top_blob.create(outw, outh, outc, 4u, 1, opt.blob_allocator);
if (top_blob.empty())
return -100;
#pragma omp parallel for num_threads(opt.num_threads)
for (int p = 0; p < outc; p++)
{
const float* ptr = bottom_blob.channel(p % channels).row((p / channels) % 2) + ((p / channels) / 2);
float* outptr = top_blob.channel(p);
for (int i = 0; i < outh; i++)
{
for (int j = 0; j < outw; j++)
{
*outptr = *ptr;
outptr += 1;
ptr += 2;
}
ptr += w;
}
}
return 0;
}
};
DEFINE_LAYER_CREATOR(YoloV5Focus)
int initYolov5Net(std::string& param_path, std::string& bin_path, ncnn::Net& yolov5_net,bool use_gpu)
{
bool has_gpu = false;
yolov5_net.clear();
//CPU相关设置(只实现了安卓端)
/// 0 = all cores enabled(default)
/// 1 = only little clusters enabled
/// 2 = only big clusters enabled
//ncnn::set_cpu_powersave(2);
//ncnn::set_omp_num_threads(ncnn::get_big_cpu_count());
#if NCNN_VULKAN
ncnn::create_gpu_instance();
has_gpu = ncnn::get_gpu_count() > 0;
#endif
yolov5_net.opt.use_vulkan_compute = (use_gpu && has_gpu);
yolov5_net.opt.use_bf16_storage = true;
//动态注册层
yolov5_net.register_custom_layer("YoloV5Focus", YoloV5Focus_layer_creator);
//读取模型
int rp = yolov5_net.load_param(param_path.c_str());
int rb = yolov5_net.load_model(bin_path.c_str());
if (rp < 0 || rb < 0)
{
return -1;
}
return 0;
}
static inline float sigmoid(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
static void generateProposals(const ncnn::Mat& anchors, int stride, const ncnn::Mat& in_pad, const ncnn::Mat& feat_blob, float prob_threshold, std::vector<Object>& objects)
{
const int num_grid = feat_blob.h;
int num_grid_x;
int num_grid_y;
if (in_pad.w > in_pad.h)
{
num_grid_x = in_pad.w / stride;
num_grid_y = num_grid / num_grid_x;
}
else
{
num_grid_y = in_pad.h / stride;
num_grid_x = num_grid / num_grid_y;
}
const int num_class = feat_blob.w - 5;
const int num_anchors = anchors.w / 2;
for (int q = 0; q < num_anchors; q++)
{
const float anchor_w = anchors[q * 2];
const float anchor_h = anchors[q * 2 + 1];
const ncnn::Mat feat = feat_blob.channel(q);
for (int i = 0; i < num_grid_y; i++)
{
for (int j = 0; j < num_grid_x; j++)
{
const float* featptr = feat.row(i * num_grid_x + j);
// find class index with max class score
int class_index = 0;
float class_score = -FLT_MAX;
for (int k = 0; k < num_class; k++)
{
float score = featptr[5 + k];
if (score > class_score)
{
class_index = k;
class_score = score;
}
}
float box_score = featptr[4];
float confidence = sigmoid(box_score) * sigmoid(class_score);
if (confidence >= prob_threshold)
{
// yolov5/models/yolo.py Detect forward
// y = x[i].sigmoid()
// y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i].to(x[i].device)) * self.stride[i] # xy
// y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
float dx = sigmoid(featptr[0]);
float dy = sigmoid(featptr[1]);
float dw = sigmoid(featptr[2]);
float dh = sigmoid(featptr[3]);
float pb_cx = (dx * 2.f - 0.5f + j) * stride;
float pb_cy = (dy * 2.f - 0.5f + i) * stride;
float pb_w = pow(dw * 2.f, 2) * anchor_w;
float pb_h = pow(dh * 2.f, 2) * anchor_h;
float x0 = pb_cx - pb_w * 0.5f;
float y0 = pb_cy - pb_h * 0.5f;
float x1 = pb_cx + pb_w * 0.5f;
float y1 = pb_cy + pb_h * 0.5f;
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = class_index;
obj.prob = confidence;
objects.push_back(obj);
}
}
}
}
}
static inline float intersectionArea(const Object& a, const Object& b)
{
cv::Rect_<float> inter = a.rect & b.rect;
return inter.area();
}
static void qsortDescentInplace(std::vector<Object>& faceobjects, int left, int right)
{
int i = left;
int j = right;
float p = faceobjects[(left + right) / 2].prob;
while (i <= j)
{
while (faceobjects[i].prob > p)
i++;
while (faceobjects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(faceobjects[i], faceobjects[j]);
i++;
j--;
}
}
#pragma omp parallel sections
{
#pragma omp section
{
if (left < j) qsortDescentInplace(faceobjects, left, j);
}
#pragma omp section
{
if (i < right) qsortDescentInplace(faceobjects, i, right);
}
}
}
static void qsortDescentInplace(std::vector<Object>& faceobjects)
{
if (faceobjects.empty())
return;
qsortDescentInplace(faceobjects, 0, faceobjects.size() - 1);
}
static void nmsSortedBboxes(const std::vector<Object>& faceobjects, std::vector<int>& picked, float nms_threshold)
{
picked.clear();
const int n = faceobjects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = faceobjects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const Object& a = faceobjects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const Object& b = faceobjects[picked[j]];
// intersection over union
float inter_area = intersectionArea(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
{
picked.push_back(i);
}
}
}
int targetDetection(cv::Mat& cv_src, ncnn::Net& yolov5_net, std::vector<Object>& objects, int target_size,
float prob_threshold, float nms_threshold)
{
int w = cv_src.cols, h = cv_src.rows;
float scale = 1.0f;
if (w > h)
{
scale = (float)target_size / (float)w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / (float)h;
h = target_size;
w = w * scale;
}
ncnn::Mat ncnn_in = ncnn::Mat::from_pixels_resize(cv_src.data, ncnn::Mat::PIXEL_BGR2RGB, cv_src.cols, cv_src.rows, w, h);
//边缘扩展检测的尺寸
//源码在 yolov5/utils/datasets.py letterbox方法
int wpad = (w + 31) / 32 * 32 - w;
int hpad = (h + 31) / 32 * 32 - h;
ncnn::Mat in_pad;
ncnn::copy_make_border(ncnn_in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 114.f);
const float norm_vals[3] = { 1 / 255.f, 1 / 255.f, 1 / 255.f };
in_pad.substract_mean_normalize(0, norm_vals);
//创建一个提取器
ncnn::Extractor ex = yolov5_net.create_extractor();
ex.input("images", in_pad);
std::vector<Object> proposals;
//stride 8
{
ncnn::Mat out;
ex.extract("750", out);
ncnn::Mat anchors(6);
anchors[0] = 10.f;
anchors[1] = 13.f;
anchors[2] = 16.f;
anchors[3] = 30.f;
anchors[4] = 33.f;
anchors[5] = 23.f;
std::vector<Object> objects8;
generateProposals(anchors, 8, in_pad, out, prob_threshold, objects8);
proposals.insert(proposals.end(), objects8.begin(), objects8.end());
}
stride 16
{
ncnn::Mat out;
ex.extract("771", out);
ncnn::Mat anchors(6);
anchors[0] = 30.f;
anchors[1] = 61.f;
anchors[2] = 62.f;
anchors[3] = 45.f;
anchors[4] = 59.f;
anchors[5] = 119.f;
std::vector<Object> objects16;
generateProposals(anchors, 16, in_pad, out, prob_threshold, objects16);
proposals.insert(proposals.end(), objects16.begin(), objects16.end());
}
// stride 32
{
ncnn::Mat out;
ex.extract("791", out);
ncnn::Mat anchors(6);
anchors[0] = 116.f;
anchors[1] = 90.f;
anchors[2] = 156.f;
anchors[3] = 198.f;
anchors[4] = 373.f;
anchors[5] = 326.f;
std::vector<Object> objects32;
generateProposals(anchors, 32, in_pad, out, prob_threshold, objects32);
proposals.insert(proposals.end(), objects32.begin(), objects32.end());
}
// sort all proposals by score from highest to lowest
qsortDescentInplace(proposals);
// apply nms with nms_threshold
std::vector<int> picked;
nmsSortedBboxes(proposals, picked, nms_threshold);
int count = picked.size();
objects.resize(count);
for (int i = 0; i < count; i++)
{
objects[i] = proposals[picked[i]];
// adjust offset to original unpadded
float x0 = (objects[i].rect.x - (wpad / 2)) / scale;
float y0 = (objects[i].rect.y - (hpad / 2)) / scale;
float x1 = (objects[i].rect.x + objects[i].rect.width - (wpad / 2)) / scale;
float y1 = (objects[i].rect.y + objects[i].rect.height - (hpad / 2)) / scale;
// clip
x0 = std::max(std::min(x0, (float)(cv_src.cols - 1)), 0.f);
y0 = std::max(std::min(y0, (float)(cv_src.rows - 1)), 0.f);
x1 = std::max(std::min(x1, (float)(cv_src.cols - 1)), 0.f);
y1 = std::max(std::min(y1, (float)(cv_src.rows - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
return 0;
}
void drawObjects(const cv::Mat& cv_src, const std::vector<Object>& objects,std::vector<std::string> & class_names)
{
cv::Mat cv_detect = cv_src.clone();
for (size_t i = 0; i < objects.size(); i++)
{
const Object& obj = objects[i];
std::cout << "Object label:" << obj.label << " Object prod:" << obj.prob
<<" Object rect" << obj.rect << std::endl;
cv::rectangle(cv_detect, obj.rect, cv::Scalar(255, 0, 0));
std::string text = class_names[obj.label] + " " +std::to_string(int(obj.prob * 100)) +"%";
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > cv_detect.cols)
x = cv_detect.cols - label_size.width;
cv::rectangle(cv_detect, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(cv_detect, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
cv::imshow("image", cv_detect);
}
int main(void)
{
std::string parma_path = "models/ODIDF16.param";
std::string bin_parh = "models/ODIDF16.bin";
ncnn::Net yolov5_net;
initYolov5Net(parma_path,bin_parh,yolov5_net,true);
std::vector<std::string> class_names{ "ida", "idb", "idback", "idhead" };
std::string path = "images";
std::vector<std::string> filenames;
cv::glob(path, filenames, false);
for (auto name : filenames)
{
cv::Mat cv_src = cv::imread(name);
if (cv_src.empty())
{
continue;
}
std::vector<Object> objects;
double start = static_cast<double>(cv::getTickCount());
targetDetection(cv_src, yolov5_net, objects);
double time = ((double)cv::getTickCount() - start) / cv::getTickFrequency();
std::cout << name <<"Detection time:" << time << "(second) " << std::endl;
drawObjects(cv_src, objects, class_names);
cv::waitKey();
}
return 0;
}
运行结果:
光头:


佩戴安全帽:


带帽子也可以检测出来不是安全帽

正常状态:


六、源码配置
1.C++部署模型的工程源码地址:https://download.csdn.net/download/matt45m/85384651
2.训练代码地址:https://download.csdn.net/download/matt45m/85384016
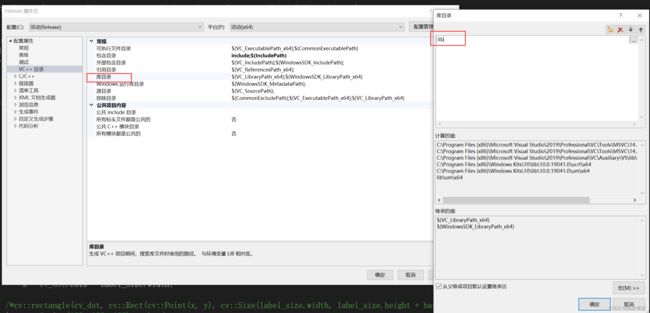
4.配置包括目录

5.配置lib目录
5.添加依赖项
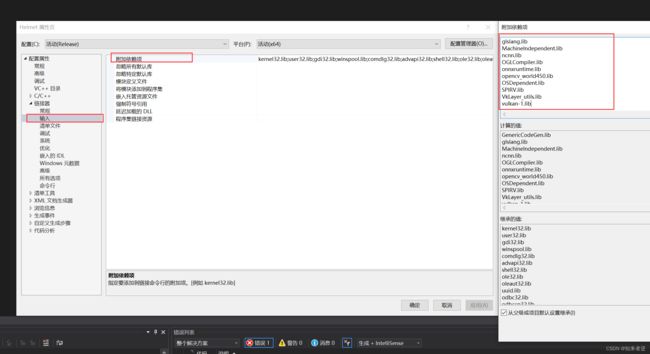
GenericCodeGen.lib
glslang.lib
MachineIndependent.lib
ncnn.lib
OGLCompiler.lib
onnxruntime.lib
opencv_world450.lib
OSDependent.lib
SPIRV.lib
VkLayer_utils.lib
vulkan-1.lib
4.配置运行环境