图解机器学习算法(8) | 回归树模型详解(机器学习通关指南·完结)

- 作者:韩信子@ShowMeAI
- 教程地址:https://www.showmeai.tech/tutorials/34
- 本文地址:https://www.showmeai.tech/article-detail/192
- 声明:版权所有,转载请联系平台与作者并注明出处
引言
大家在前面的部分学习到了使用决策树进行分类,实际决策树也可以用作回归任务,我们叫作回归树。而回归树的结构还是树形结构,但是属性选择与生长方式和分类的决策树有不同,我们一起来看看它的原理知识吧。
(本篇回归树模型部分内容涉及到机器学习基础知识、决策树算法,没有先序知识储备的宝宝可以查看ShowMeAI的文章 [图解机器学习 | 机器学习基础知识]((https://www.showmeai.tech/article-detail/185) 及 决策树模型详解)。
1.决策树回归算法核心思想
1)决策树结构回顾
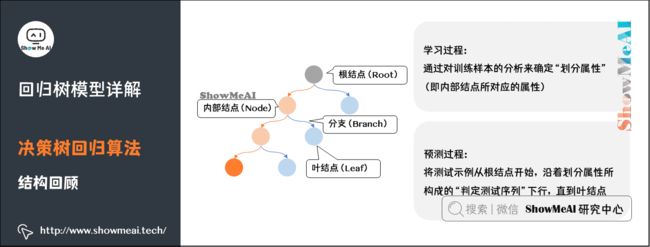
我们一起来回顾一下决策树的结构,决策树的典型结构如下图所示。

决策树的学习过程和预测过程如下图所示。详细内容可以参考ShowMeAI的文章 决策树模型详解。
主流的决策树算法有:
-
ID3:基于信息增益来选择分裂属性(每步选择信息增益最大的属性作为分裂节点,树可能是多叉的)。
-
C4.5:基于信息增益率来选择分裂属性(每步选择信息增益率最大的属性作为分裂节点,树可能是多叉的)。
-
CART:基于基尼系数来构建决策树(每步要求基尼系数最小,树是二叉的)。
其中:CART树全称Classification And Regression Tree,即可以用于分类,也可以用于回归,这里指的回归树就是CART树,ID3和C4.5不能用于回归问题。
2)回归树的核心思想
要讲回归树,我们一定会提到CART树,CART树全称Classification And Regression Trees,包括分类树与回归树。
CART的特点是:假设决策树是二叉树,内部结点特征的取值为「是」和「否」,右分支是取值为「是」的分支,左分支是取值为「否」的分支。这样的决策树等价于「递归地二分每个特征」,将输入空间(特征空间)划分为有限个单元,并在这些单元上确定预测的概率分布,也就是在输入给定的条件下输出的条件概率分布。
设有数据集 D D D ,构建回归树的大体思路如下:
-
①考虑数据集 D D D 上的所有特征 j j j ,遍历每一个特征下所有可能的取值或者切分点 s s s ,将数据集 D D D 划分成两部分 D 1 D_1 D1 和 D 2 D_2 D2 。
-
②分别计算 D 1 D_1 D1 和 D 2 D_2 D2 的平方误差和,选择最小的平方误差对应的特征与分割点,生成两个子节点(将数据划分为两部分)。
-
③对上述两个子节点递归调用步骤①②,直到满足停止条件。
回归树构建完成后,就完成了对整个输入空间的划分(即完成了回归树的建立)。将整个输入空间划分为多个子区域,每个子区域输出为该区域内所有训练样本的平均值。
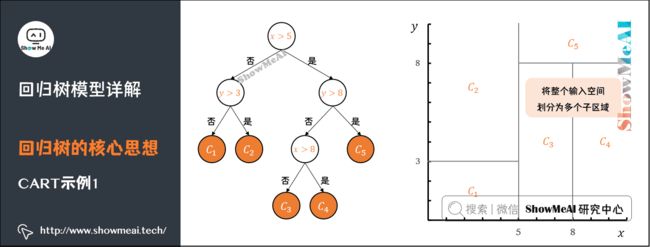
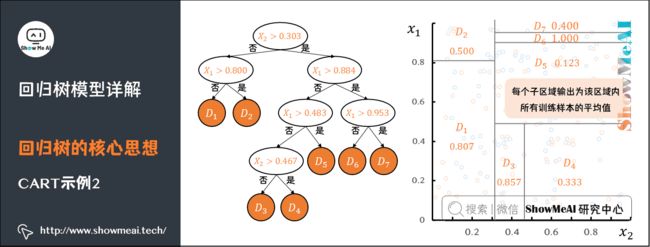
我们知道了回归树其实是将输入空间划分为M个单元,每个区域的输出值是该区域内所有点y值的平均数。但我们希望构建最有效的回归树:预测值与真实值差异度最小。下面部分我们展开讲讲,回归树是如何生长的。
2.启发式切分与最优属性选择
1)回归树模型示例
我们用一个经典的棒球案例来解释回归树:根据从业年限和表现,去预估棒球运动员的工资。如下所示,有1987个数据样本,包含322个棒球运动员。红黄表示高收入,蓝绿表示低收入。横坐标是年限,纵坐标是表现。
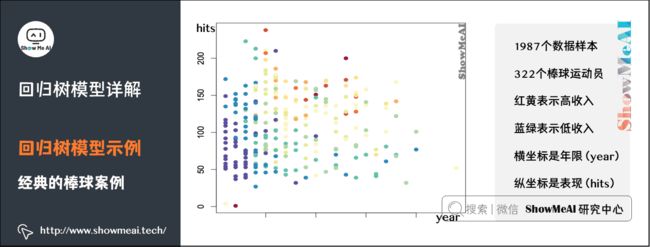
这个简单案例中,每个样本数据有两个特征:从业年限years和成绩表现hits,回归树的决策过程由最终生成的回归树决定,如右图所示:
-
根决策节点为特征Years,其划分阈值为4.5,Years小于4.5的样本划分到左边,大于或等于4.5的样本划分到右边;
-
第二个决策节点的特征为Hits,其划分阈值为117.5,Hits小于117.5的样本划分到左边,大于或等于117.5的样本划分到右边。
-
一个样本顺着决策树的决策条件,走到叶子节点,即可获得预测工资,这里的预测工资总共就3种取值,分别为5.11、6.00、6.74。

我们来深入拆解和对应一下,其实回归树构建完成后,实现了对整个空间的划分(如下图所示)。实际预测时,新样本会按照回归树的决策过程,被划分到下图 R 1 R_1 R1 、 R 2 R_2 R2 、 R 3 R_3 R3 之中的一个区域 R i R_i Ri ,而这个新样本的预测值(本案例中为棒球运动员的工资)就是它所在的区域。
- R i R_i Ri 中所有训练样本的工资平均值。
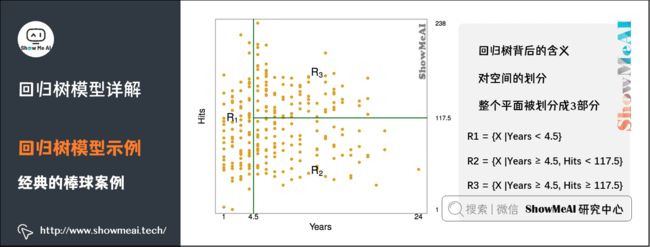
回归树背后的含义:对空间的划分。整个平面被划分成3部分:
- R 1 = { X ∣ Y e a r s < 4.5 } R1 = \{X |Years < 4.5\} R1={X∣Years<4.5}
- R 2 = { X ∣ Y e a r s ≥ 4.5 , H i t s < 117.5 } R2 = \{X |Years ≥ 4.5, Hits < 117.5\} R2={X∣Years≥4.5,Hits<117.5}
- R 3 = { X ∣ Y e a r s ≥ 4.5 , H i t s ≥ 117.5 } R3 = \{X |Years ≥ 4.5, Hits ≥ 117.5\} R3={X∣Years≥4.5,Hits≥117.5}
2)回归树构建方法
下面切到回归树构建的核心:切分方式与属性选择。
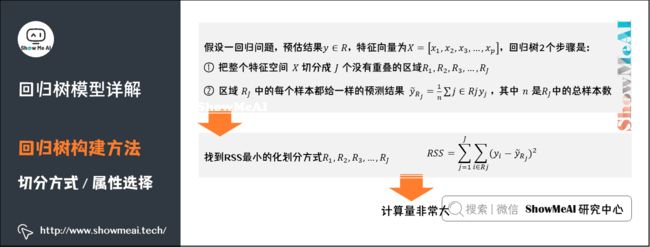
假设一回归问题,预估结果 y ∈ R y \in R y∈R ,特征向量为 X = [ x 1 , x 2 , x 3 , … , x p ] X = [x_1,x_2,x_3, \dots , x_p ] X=[x1,x2,x3,…,xp] ,回归树2个步骤是:
-
①把整个特征空间 X X X 切分成 J J J 个没有重叠的区域 R 1 , R 2 , R 3 , … , R J R_1,R_2,R_3, \dots ,R_J R1,R2,R3,…,RJ
-
②其中区域 R J R_J RJ 中的每个样本我们都给一样的预测结果 y ~ R j = 1 n ∑ j ∈ R j y j \tilde{y}_{R_{j}}=\frac{1}{n} \sum j \in R j y_{j} y~Rj=n1∑j∈Rjyj ,其中 n n n 是 R J R_J RJ 中的总样本数。
仔细观察一下上面的过程,实际上我们希望能找到如下的RSS最小的化划分方式 R 1 , R 2 , R 3 , … , R J R_1,R_2,R_3, \dots ,R_J R1,R2,R3,…,RJ
R S S = ∑ j = 1 J ∑ i ∈ R j ( y i − y ~ R j ) 2 R S S=\sum_{j=1}^{J} \sum_{i \in R j}\left(y_{i}-\tilde{y}_{R_{j}}\right)^{2} RSS=j=1∑Ji∈Rj∑(yi−y~Rj)2
-
y y y :为每个训练样本的标签构成的标签向量,向量中的每个元素 $y_j $ 对应的是每个样本的标签。
-
X X X :为特征的集合, x 1 , x 2 , … , x p x_1,x_2, \dots , x_p x1,x2,…,xp 为第1个特征到第 p p p 个特征。
-
R 1 , R 2 , R 3 , … , R J R_1,R_2,R_3, \dots ,R_J R1,R2,R3,…,RJ 为整个特征空间划分得来的J个不重叠的区域(可以参考上页的右图)。
-
y ~ R j \tilde{y}_{R_{j}} y~Rj :为划分到第 j j j 个区域 $R_j $ 的样本的平均标签值,用这个值作为该区域的预测值,即如果有一个测试样本在测试时落入到该区域,就将该样本的标签值预测为 y ~ R j \tilde{y}_{R_{j}} y~Rj 。
但是这个最小化和探索的过程,计算量是非常非常大的。我们采用「探索式的递归二分」来尝试解决这个问题。
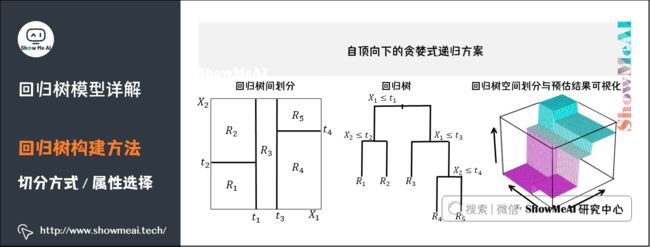
递归二分
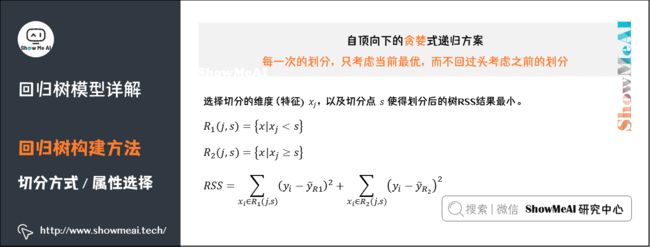
回归树采用的是「自顶向下的贪婪式递归方案」。这里的贪婪,指的是每一次的划分,只考虑当前最优,而不回头考虑之前的划分。从数学上定义,即选择切分的维度(特征) x j x_j xj 以及切分点 s s s 使得划分后的树RSS结果最小,公式如下所示:
R 1 ( j , s ) = { x ∣ x j < s } R 2 ( j , s ) = { x ∣ x j ≥ s } R S S = ∑ x i ∈ R 1 ( j , s ) ( y i − y ~ R 1 ) 2 + ∑ x i ∈ R 2 ( j , s ) ( y i − y ~ R 2 ) 2 \begin{aligned} & R_{1}(j, s)=\left\{x \mid x_{j}
我们再来看看「递归切分」。下方有两个对比图,其中左图是非递归方式切分得到的,而右图是二分递归的方式切分得到的空间划分结果(下一次划分一定是在之前的划分基础上将某个区域一份为二)。
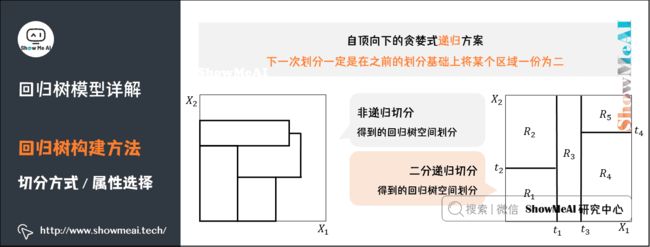
两种方式的差别是:递归切分一定可以找到一个较优的解,非递归切分穷举不了所有情况,算法上无法实现,可能无法得到一个较好的解。
回归树总体流程类似于分类树:分枝时穷举每一个特征可能的划分阈值,来寻找最优切分特征和最优切分点阈值,衡量的方法是平方误差最小化。分枝直到达到预设的终止条件(如叶子个数上限)就停止。
但通常在处理具体问题时,单一的回归树模型能力有限且有可能陷入过拟合,我们经常会利用集成学习中的Boosting思想,对回归树进行增强,得到的新模型就是提升树(Boosting Decision Tree),进一步,可以得到梯度提升树(Gradient Boosting Decision Tree,GBDT),再进一步可以升级到XGBoost。通过多棵回归树拟合残差,不断减小预测值与标签值的偏差,从而达到精准预测的目的,ShowMeAI会在后面介绍这些高级算法。
3.过拟合与正则化
1)过拟合问题
决策树模型存在过拟合风险,通常情况下,树的规模太小会导致模型效果不佳,而树的规模太大就会造成过拟合,非常难以控制。
2)过拟合问题处理
对于决策树,我们通常有如下一些策略可以用于环节过拟合:
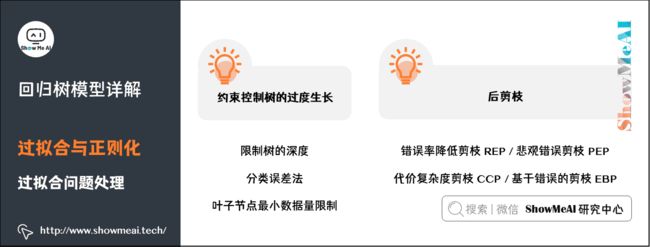
(1)约束控制树的过度生长
- 限制树的深度:当达到设置好的最大深度时结束树的生长。
- 分类误差法:当树继续生长无法得到客观的分类误差减小,就停止生长。
- 叶子节点最小数据量限制:一个叶子节点的数据量过小,树停止生长。
(2)剪枝
约束树生长的缺点就是提前扼杀了其他可能性,过早地终止了树的生长,我们也可以等待树生长完成以后再进行剪枝,即所谓的后剪枝,而后剪枝算法主要有以下几种:
- Reduced-Error Pruning(REP,错误率降低剪枝)。
- Pesimistic-Error Pruning(PEP,悲观错误剪枝)。
- Cost-Complexity Pruning(CCP,代价复杂度剪枝)。
- Error-Based Pruning(EBP,基于错误的剪枝)。
3)正则化
对于回归树而言,在剪枝过程中我们会添加正则化项衡量。如下所示,考虑剪枝后得到的子树 { T a } \left \{T_a \right \} {Ta} ,其中 α \alpha α 是正则化项的系数。当固定住 α \alpha α 之后,最佳的 T a T_a Ta 就是使得下列式子值最小的子树。
∑ m = 1 ∣ T ∣ ∑ x i ∈ R m ( y i − y ~ R 2 ) 2 + α ∣ T ∣ \sum_{m=1}^{|T|} \sum_{x_{i} \in R_{m}}\left(y_{i}-\tilde{y}_{R_{2}}\right)^{2}+\alpha|T| m=1∑∣T∣xi∈Rm∑(yi−y~R2)2+α∣T∣
-
∣ T ∣ |T| ∣T∣ 是回归树叶子节点的个数。
-
α \alpha α 可以通过交叉验证去选择。
更多监督学习的算法模型总结可以查看ShowMeAI的文章 AI知识技能速查 | 机器学习-监督学习。
视频教程
可以点击 B站 查看视频的【双语字幕】版本
【双语字幕+资料下载】MIT 6.036 | 机器学习导论(2020·完整版)
【双语字幕+资料下载】MIT 6.036 | 机器学习导论(2020·完整版)
https://www.bilibili.com/video/BV1y44y187wN?p=12
ShowMeAI图解机器学习算法系列(完整版)
- ShowMeAI 图解机器学习算法(1) | 机器学习基础知识
- ShowMeAI 图解机器学习算法(2) | 模型评估方法与准则
- ShowMeAI 图解机器学习算法(3) | KNN算法及其应用
- ShowMeAI 图解机器学习算法(4) | 逻辑回归算法详解
- ShowMeAI 图解机器学习算法(5) | 朴素贝叶斯算法详解
- ShowMeAI 图解机器学习算法(6) | 决策树模型详解
- ShowMeAI 图解机器学习算法(7) | 随机森林分类模型详解
- ShowMeAI 图解机器学习算法(8) | 回归树模型详解
- ShowMeAI 图解机器学习算法(9) | GBDT模型详解
- ShowMeAI 图解机器学习算法(10) | XGBoost模型最全解析
- ShowMeAI 图解机器学习算法(11) | LightGBM模型详解
- ShowMeAI 图解机器学习算法(12) | 支持向量机模型详解
- ShowMeAI 图解机器学习算法(13) | 聚类算法详解
- ShowMeAI 图解机器学习算法(14) | PCA降维算法详解
ShowMeAI系列教程精选推荐
- 大厂技术实现:推荐与广告计算解决方案
- 大厂技术实现:计算机视觉解决方案
- 大厂技术实现:自然语言处理行业解决方案
- 图解Python编程:从入门到精通系列教程
- 图解数据分析:从入门到精通系列教程
- 图解AI数学基础:从入门到精通系列教程
- 图解大数据技术:从入门到精通系列教程
- 图解机器学习算法:从入门到精通系列教程
- 机器学习实战:手把手教你玩转机器学习系列
- 深度学习教程:吴恩达专项课程 · 全套笔记解读
- 自然语言处理教程:斯坦福CS224n课程 · 课程带学与全套笔记解读
- 深度学习与计算机视觉教程:斯坦福CS231n · 全套笔记解读
