梯度下降法基本原理
求解线性回归模型–函数求极值
- 解析解
- 根据严格的推导和计算得到,是方程的精确解
- 能够在任意精度下满足方程
但是在很多情况下,无法直接通过严格的公式推导,得到方程或者方程组的解析解,这时候只能够采用数值分析的方法得到近似解,这样的解也成为数值解
- 数值解
- 通过某种近似计算得到的解
- 能够在给定的精度条件下满足方程
我们就都介绍一种常用的求数值解的方法,梯度下降法。为了便于理解,我们先从最简单的一元凸函数开始介绍梯度下降法的求解过程。
一元凸函数求极值

这是一元函数fx=x平方+2的函数曲线,这种形状的函数称为凸函数,他一定存在唯一的一个极小值点,这个点在一个斜率正好为0的位置。在求解一个问题的时候,如果我们能够把它转换为在凸函数上求极小值的问题,那么这个问题就算已经破解了。在上节课中我们介绍了求这个函数的解析解的方法,下面我们来看一下,如何采用数值计算的方法来得到它的数值解。这类问题可以采用迭代的方法来求解。

这类问题可以采用迭代的方法来求解,首先我们在函数曲线上取任意1点 x 0 x_0 x0作为初值,当然这个初值不会恰好在极值点上。下面,我们按照某个步长移动x找到 x 1 x_1 x1,使得函数在 x 1 x_1 x1上的值,小于在 x 0 x_0 x0上的值。不断重复这个步骤,直到无法找到更小的函数值,最后找到的这个x,就是使函数达到极小值时的位置。
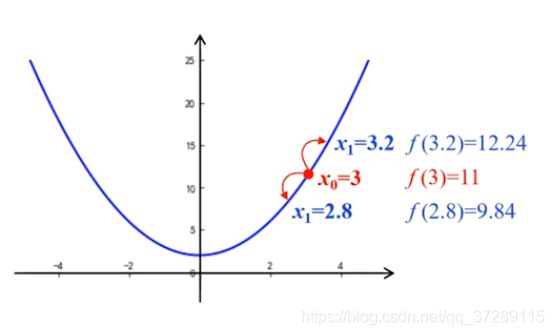
例如取初始值 x 0 = 3 x_0=3 x0=3,那么这一点的函数值等于11。假设取步长是0.2,那么x可能分别向两个方向移动,到达3.2或者2.8的位置,究竟应该向哪个方向移动呢?对比它们的函数值分别是显然9.84小于12.24。因此,取 x 1 = 2.8 x_1=2.8 x1=2.8。
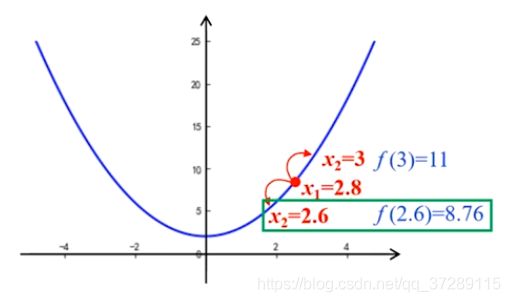
下面再以2.8为起点,步长仍然是0.2,对比函数,在 x = 2.6 x=2.6 x=2.6和 x = 3 x=3 x=3处的取值,显然,在 x = 2.6 x=2.6 x=2.6时的函数值更小。因此,取 x 2 = 2.6 x_2=2.6 x2=2.6。下面再以2.6为起点,继续这个步骤不断移动x,直到函数达到最小值,这个图只是个示意图,这个步长的比例是夸张了,其实每一步0.2是要比这个小很多。
为了更加严谨,我们用表格的形式来展示这个迭代的过程。

这是初值,x0=3,比较 x = 2.8 x=2.8 x=2.8和 x = 3.2 x=3.2 x=3.2对应的函数值,因为9.84小于12.24,所以选择 x 1 = 2.8 x_1=2.8 x1=2.8,进入下一次迭代,这时初值是2.8,根据函数值要不断减小的原则,选择 x 1 = 2.6 x_1=2.6 x1=2.6,再进入下一次迭代。不断重复这个步骤,在第15次迭代时,到达 x = 0 x=0 x=0。 x = 0 x=0 x=0时,函数值等于2。现在,无论往哪个方向移动,函数值都是2.04,比 x = 0 x=0 x=0时更大。也就是说,到这里之后,函数值不能再继续减小了。因此,当 x = 0 x=0 x=0时, f ( x ) f(x) f(x)就达到了最小值,迭代结束。
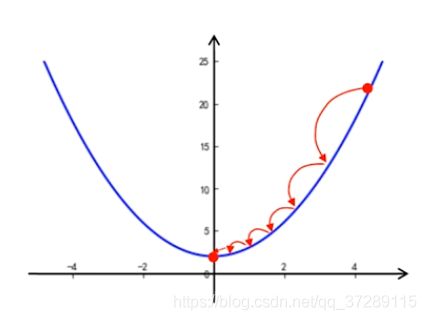
采用这种方法,需要通过多次迭代,不断的接近极值点,因此要花费比较长的时间,如果想要速度更快一点,可以把步长的值加大,例如把步长改为0.5。

那么,只要经过6次迭代就可以达到极小值点。可见步长取值越大,找到极值点的速度就越快,那么是不是不长的取值越大越好呢?我们将步长设为0.7来试一下

可以看到在第4次迭代时 x = 0.2 x=0.2 x=0.2,这时候可以取到的两个点分别是-0.5和0.9。取-0.5时函数值更小,因此下一步取-0.5,这时候比较 x = − 1.2 x=-1.2 x=−1.2和 x = 0.2 x=0.2 x=0.2时函数的取值,取0.2时函数值更小,因此又回到了0.2。继续进行这个过程会一直在0.2和-0.5之间来回震荡,无法达到极小值点。
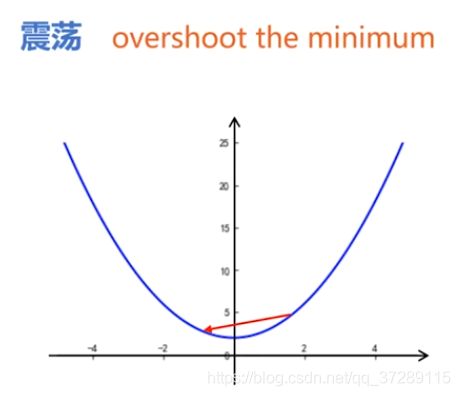
产生震荡的原因是因为更新x的时候,步长太大,一下子跨过了最小值。在英文资料中把这种情况称为overshoot the minimum。
震荡现象也分为两种情况,一种是虽然来回震荡,但是震幅越来越小,最后还是可以收敛。另一种就是来回震荡无法收敛。
通过这个例子我们发现,
- 步长如果太小会增加迭代次数,收敛速度很慢。
- 不长如果太大又会引起震荡,甚至导致无法收敛
那么这个不长的职能不能自动地调节呢,在距离及时点比较远的地方,步长的取值可以大一些,使得算法尽快收敛。在距离极值点比较近的地方,可以使步长逐渐减小,避免跨过极小值点发生震荡。这个想法显然不错,但是怎样才能够实现这种不长的自动调节呢?
观察这个曲线可以发现,距离极值点比较远的地方,曲线比较陡峭,随着不断靠近极值点曲线逐渐变得平缓。曲线的陡峭程度可以用斜率表示,曲线越陡斜率越大,这时候我们希望步长也越大。曲线越平缓,斜率越小,我们希望步长也越小,因此只要用斜率去调节步长就可以了。
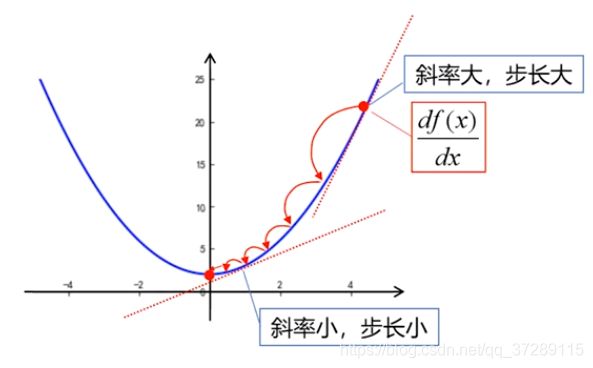
曲线在这一点的斜率就是函数在这个点的导数,让步长和斜率之间保持正比例关系。
步 长 = η d f ( x ) d x 步长=\eta\frac{df(x)}{dx} 步长=ηdxdf(x), η \eta η是一个常数,称为学习率。
就可以得到更新x的迭代公式 x ( k + 1 ) = x ( k ) − η d f ( x ) d x x^{(k+1)}=x^{(k)}-\eta\frac{df(x)}{dx} x(k+1)=x(k)−ηdxdf(x)
这里我们采用加括号的上标来表示迭代的次数,这是为了和之前采用下标表示样本序号,采用上标表示属性区分开来。在第k+1次迭代中,x的取值是由第k次x的值减去步长得到。
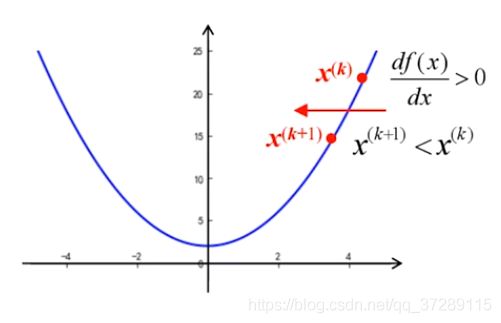
采用这种方法进行迭代,可以根据函数曲线的斜率实现,对步长的自适应调整,在这种迭代算法中,当x大于0时导数为正数。这时候, x ( k + 1 ) = x ( k ) − a x^{(k+1)}=x^{(k)}-a x(k+1)=x(k)−a,a为正数,变得更小,向原点的方向移动。
当x小于0时,导数为负数, x ( k + 1 ) = x ( k ) − a x^{(k+1)}=x^{(k)}-a x(k+1)=x(k)−a,a为负数,变得更大,x也是向原点的方向移动,

可见无论x是大于0还是小于0,最后都能够收敛于原点。采用这种方法导数的符号就直接决定了迭代更新的方向,而不需要像前面的例子那样,每次都去比较两个方向的函数值来确定x移动的方向。
总结一下,采用这种迭代算法能够自动调节步长,自动确定下一次更新的方向,并且能够保证收敛性。
这种一元凸函数求极值的方法可以推广到二元凸函数中,二元函数中有两个自变量 z = f ( x , y ) z=f(x,y) z=f(x,y),x和y需要分别进行迭代计算。
这是二元函数的迭代算法,
x ( k + 1 ) = x ( k ) − η ∂ f ( x , y ) ∂ x x^{(k+1)}=x^{(k)}-\eta\frac{\partial{f(x, y)}}{\partial{x}} x(k+1)=x(k)−η∂x∂f(x,y)
y ( k + 1 ) = y ( k ) − η ∂ f ( x , y ) ∂ y y^{(k+1)}=y^{(k)}-\eta\frac{\partial{f(x, y)}}{\partial{y}} y(k+1)=y(k)−η∂y∂f(x,y)
x的更新通过函数对x的偏导数来调节,y的更新通过函数对y的偏导数来调节。
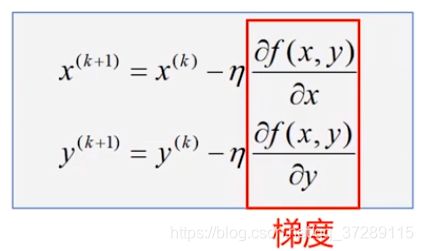
函数f对x的偏导数和对y的偏导数,所组成的向量是二元函数的梯度。
-
导数:函数在某一点p的导数,其实就是函数在p点的变化率。
-
偏导数: ∂ f ( x , y ) ∂ x \frac{\partial{f(x, y)}}{\partial{x}} ∂x∂f(x,y)二元函数对x的偏导数,就是函数在x方向上的变化率。
∂ f ( x , y ) ∂ y \frac{\partial{f(x, y)}}{\partial{y}} ∂y∂f(x,y)对y的偏导数就是函数在y方向的变化率 -
方向导数:函数沿着某一个方向l的变化率,这个l可以是任何一个方向
x偏导数和y偏导数都是方向导数的特例,那么函数在p点时沿着哪一个方向的变化最快呢?也就是说哪一个方向导数最大,这个最大的值又是多少呢?这个问题的答案就是梯度。
- 梯度: g r a d ⃗ f ( x , y ) = ∂ f ∂ x i ⃗ + ∂ f ∂ y j ⃗ \vec{grad}f(x, y)=\frac{\partial{f}}{\partial{x}}\vec{i}+\frac{\partial{f}}{\partial{y}}\vec{j} gradf(x,y)=∂x∂fi+∂y∂fj
梯度是一个矢量,既有大小又有方向,也可以采用这样的向量形式来表示.
∇ = ( ∂ f ( x , y ) ∂ x ∂ f ( x , y ) ∂ y ) \nabla=(\begin{array}{c} \frac{\partial{f(x, y)}}{\partial{x}} \\ \frac{\partial{f(x, y)}}{\partial{y}} \end{array}) ∇=(∂x∂f(x,y)∂y∂f(x,y))- 它的大小就是所有方向导数中那个最大的值。
- 它的方向就是取得最大方向导数的方向,或者说函数在某个点的梯度,就是指在这个点沿着这个方向的变化率最大。
这种二元函数求极值的迭代算法,其实就是每一步都是沿着梯度的方向移动,也就是沿着最陡的方向进行移动这样做计算的速度是最快的,这种方法被称为梯度下降法。

这就好像下山,我们在山腰上的某个位置环顾一圈之后,沿着当前最陡的方向,向下走一步。然后再环顾一圈,再沿着目前最陡的方向向下走一步。不断重复这个过程,保证每一步都是沿着当时最陡的方向向下走,那么一定可以以最少的步数到达山脚下,当然这要假设这个山的每个方向上都有路,都可以向下走。
对于机器学习算法,只要能够把损失函数描述成凸函数,那么就一定可以采用梯度下降法,以最快的速度更新模型参数,找到使损失函数达到最小值的点的位置。