矩阵的坐标系变换
文章目录
-
- 矩阵的坐标系变换
- 一、矩阵
- 二、坐标系变换
矩阵的坐标系变换
一、矩阵
一个 m × n m \times n m×n的矩阵可以将一个 n n n维的向量转化成一个 m m m维度的新向量,例如rotation matrix
[ c o s θ − s i n θ s i n θ c o s θ ] ⋅ [ 1 0 ] = [ c o s θ s i n θ ] \begin{bmatrix} cos \theta & -sin \theta \\ sin \theta & cos \theta \end{bmatrix} \cdot \begin{bmatrix} 1 \\ 0 \end{bmatrix} = \begin{bmatrix} cos\theta \\ sin\theta \end{bmatrix} [cosθsinθ−sinθcosθ]⋅[10]=[cosθsinθ]
我们可以将上式理解为rotation matrix将向量 e 1 e_1 e1旋转了一个角度 θ \theta θ, 得到了一个新的向量。
二、坐标系变换
我们也可以将上式理解为矩阵对坐标系的变换。对比于将一个向量转化成了一个新的向量,在向量变换的过程中,我们认为坐标系是没有改变的。我们始终是以 ( e 1 , e 2 ) (e_1, e_2) (e1,e2)作为basis。但当我们将矩阵变换理解为坐标系变换的时候,我们的初始坐标系并不是 ( e 1 , e 2 ) (e_1, e_2) (e1,e2),而是以 ( c o s θ , s i n θ ) , ( − s i n θ , c o s θ ) (cos\theta, sin\theta), (-sin\theta, cos\theta) (cosθ,sinθ),(−sinθ,cosθ)作为basis的坐标系(虚线坐标系)。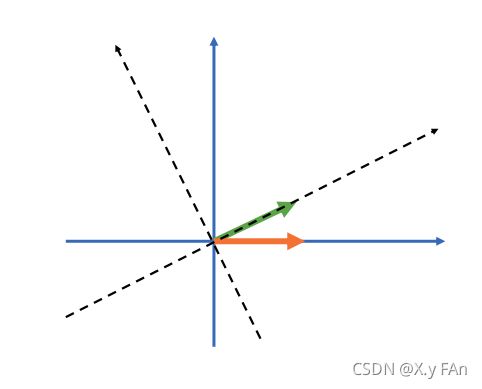
在这个虚线坐标系下,绿色向量的坐标为 ( 1 , 0 ) (1, 0) (1,0)。而矩阵变换告诉了我们这个向量在 ( e 1 , e 2 ) (e_1, e_2) (e1,e2)为basis的坐标系(蓝色坐标系)下的坐标,也就是矩阵变换的结果 ( c o s θ , s i n θ ) (cos\theta, sin\theta) (cosθ,sinθ)。我们还可以发现,这个矩阵体现了如何用 ( e 1 , e 2 ) (e_1, e_2) (e1,e2)的线性组合表示虚线坐标系。这个矩阵可以理解为,要想用 ( e 1 , e 2 ) (e_1, e_2) (e1,e2)表示虚线坐标系,虚线坐标系第一个eigenvector是 c o s θ e 1 + s i n θ e 2 cos\theta e_1 + sin\theta e_2 cosθe1+sinθe2,虚线坐标系的第二个eigenvector是 − s i n θ e 1 + c o s θ e 2 -sin\theta e_1 + cos\theta e_2 −sinθe1+cosθe2。而矩阵的值,正是线性组合的系数。
蓝色坐标系为我们的目标坐标系(结果 ( c o s θ , s i n θ ) (cos\theta, sin\theta) (cosθ,sinθ)的坐标系),虚线坐标系为我们的起始坐标系 ( 1 , 0 ) (1, 0) (1,0)的坐标系,矩阵则是以目标坐标系表示起始坐标系的系数。矩阵的变换就是已知向量在起始坐标系下的坐标,求向量在目标坐标系下的坐标。
再举一个目标坐标系不是 ( e 1 , e 2 ) (e_1, e_2) (e1,e2)的例子,假如我们的目标坐标系为:
[ 1 2 2 0 ] \begin{bmatrix} 1 & 2 \\ 2 & 0 \end{bmatrix} [1220]
起始坐标系为 ( e 1 , e 2 ) (e_1, e_2) (e1,e2), 我们想知道在目标坐标系下向量 ( 3 , 2 ) (3, 2) (3,2)的坐标是多少。那么我们的矩阵就是目标坐标系来表示起始坐标系的系数。
e 1 = 0 ∗ ( 1 , 2 ) + 1 2 ∗ ( 2 , 0 ) e_1 = 0 *(1, 2)+ \frac{1}{2} * (2, 0) e1=0∗(1,2)+21∗(2,0)
e 2 = 1 2 ∗ ( 1 , 2 ) + − 1 4 ∗ ( 2 , 0 ) e_2 = \frac{1}{2} *(1, 2)+ -\frac{1}{4} * (2, 0) e2=21∗(1,2)+−41∗(2,0)
所以,矩阵为:
[ 0 1 / 2 1 / 2 − 1 / 4 ] ⋅ [ 3 2 ] = [ 1 1 ] \begin{bmatrix} 0 & 1/2 \\ 1/2 & -1/4 \end{bmatrix} \cdot \begin{bmatrix} 3 \\ 2 \end{bmatrix} = \begin{bmatrix} 1 \\ 1 \end{bmatrix} [01/21/2−1/4]⋅[32]=[11]
也就是在目标矩阵下,向量(3, 2)的坐标是(1, 1)