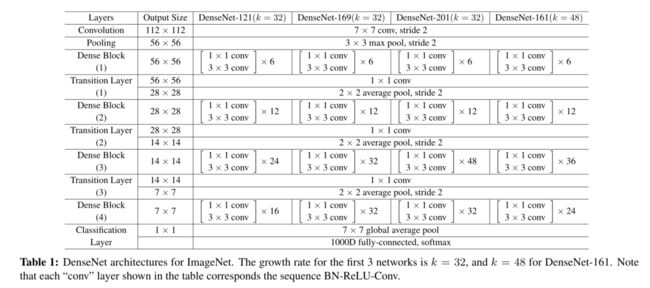
PyTorch 入门与实践(六)卷积神经网络进阶(DenseNet)
来自 B 站刘二大人的《PyTorch深度学习实践》P11 的学习笔记
上一篇 卷积神经网络进阶(GoogLeNet、ResNet) 我们实践了 GoogleNet 和 ResNet 两大经典网络:
- GoogleNet 从多路选择学习(Inception Module)出发,构建更好的神经网络;
- ResNet 从残差连接(Residual Block)保留浅层特征出发,构建更深的神经网络。
DenseNet1 紧随其后,再次研究了超深度神经网络的梯度消失问题和跳连解决方案。他们提到,ResNet 等的方法尽管在神经网络拓扑和训练过程上有所不同,但它们都有一个关键特征:使用短路径连接前后两层。
DenseNet 结构
DenseNet 更加偏执,为了确保网络在深度传播中能保留更多信息,他们不仅连接前后两层,在一个 Dense Block 中每一层都和后面所有层相连,并且是将特征在通道上堆叠再传入下一层(像 Inception Module 的输出),而不是 ResNet 那样的元素相加。
这当然能保留更多信息,不过这显存消耗可想而知,这就是为什么它叫 Dense,一个 L 层的 Dense Block 有 L ( L + 1 ) 2 \frac{L(L+1)}{2} 2L(L+1) 条连接。
一、Dense Block
每个 Dense Block 里的卷积层都是 3×3 卷积,下表第三列乘号后面的数表示一个 Dense Block 中有多少层这样的卷积。
- Bottleneck Layers
在每个 3×3 卷积之前引入 1×1 卷积作为瓶颈层,可以减少输入特征的通道数,从而提高计算效率。
所以,如果 Dense Block 里面是 1×1 卷积和 3×3 卷积的组合,那么这些 Dense Blocks 组成的 DenseNet 被称为 DenseNet-B。
二、Transition Layer
当然,为了控制显存占用,DenseNet 主要结构除了这 Dense Block 外还有每个 Block 后连接的过渡层(Transition Layer),它通过一个 1×1 的卷积层来控制通道数,并使用平均池化来减半特征图的高和宽。

所以,Dense Blocks 之间存在过渡层,那么这些 Dense Blocks 组成的 DenseNet 被称为 DenseNet-C。
两者都存在的 DenseNet,称为 DenseNet-BC,这是 DenseNet 的终极配置。。。
三、Growth Rate
增长率 k k k,它表示每一个卷积层输出的通道数。论文中说:设 k 0 k_0 k0 是初始输入的图像的通道数,那么 l l l 层的 Dense Net 就会产生 k 0 + k ( l − 1 ) k_0 + k(l-1) k0+k(l−1) 个通道的特征图,这个 k k k 就被称为增长率。
这表示通道数“爆炸”速度,但是多搞一个新名字出来吓唬人,我们当然可以直接说这是每个卷积层输出的通道数: o u t _ c h a n n e l s out\_channels out_channels,但是在代码实现过程中你就能发现,这个 k k k 要作为系数用于计算 Dense Block 中每一层卷积的输入通道,所以把输出通道称为增长率,着实细节!
利用 Bottleneck layer,Translation layer 以及较小的 Growth rate 使得网络变窄,参数减少,有效抑制了过拟合,同时计算量也减少了2。
DenseNet 最后的分类器使用全局平均池化接一层全连接层。
四、Implementation Details
对于图像较小的数据集,比如 CIFAR-10/100、SVHN,DenseNet 由 3 个 Dense Block 组成。
- 在输入第一个 Dense Block 之前先经过一个 padding=1 的 3×3 卷积,输出 32 通道;
- 使用 DenseNet-BC 配置,在每个 Dense Block 之间加入过渡层,使特征图通道数和宽高减半;
- 在最后一个 Dense Block 的末尾,执行全局平均池化,然后连接 Softmax 分类器。
输入 3 个 Dense Block 中的特征图大小分别为:32×32、16×16、8×8。采用 { L = 40 , k = 12 } \{L = 40,k = 12\} {L=40,k=12} 的 DenseNet-BC 配置。
五、代码实现
-
conv_block是 Dense Block 的基础结构,包含一层 3×3 卷积的 basic_block,和一层可选的 1×1 卷积的 bottleneck:关于
nn.Sequential可以查阅官方文档,里面举的例子十分清晰易懂。from collections import OrderedDict import torch from torch import nn def conv_block(in_channels, out_channels, bo=True): """ Dense Block 的基本组件, 一层 3×3 卷积和一层可选的 1×1 卷积 :param in_channels: :param out_channels: growth rate k :param bo: 是否使用 bottleneck :return: 一个 conv_block """ # 有无 bottleneck 会影响下面 3×3 卷积的输入通道数,所以要判断一下 in_channels_ = out_channels * 2 if bo else in_channels bo_layers = nn.Sequential(OrderedDict([ ('bn0', nn.BatchNorm2d(in_channels)), ('relu0', nn.ReLU()), ('conv1x1', nn.Conv2d(in_channels, in_channels_, kernel_size=1)), ])) basic_blk = nn.Sequential(OrderedDict([ ('bn1', nn.BatchNorm2d(in_channels_)), ('relu1', nn.ReLU()), ('conv3x3', nn.Conv2d(in_channels_, out_channels, kernel_size=3, padding=1)), ])) # 如果不用 bottleneck 可以传入一个空的 Sequential bottleneck = bo_layers if bo else nn.Sequential() blk = nn.Sequential() blk.add_module('bottleneck', bottleneck) blk.add_module('basic_blk', basic_blk) return blk -
Dense Block当前 conv_block 的输入是前面所有 conv_block 的输出堆叠起来的,所以第 l l l 层的输入通道数为:
k 0 + k × ( l − 1 ) k_0 + k \times (l - 1) k0+k×(l−1)
k 0 k_0 k0 是初始输入层的通道数 k k k 就是上面提到的 Growth Rate,也就是 conv_block 中每个卷积层的输出通道数out_channels。def dense_block(in_channels, conv_blk_num=4, k=12, bo=True): """ dense_block 由上面多个 conv_block 组成,用 for 循环添加到 nn.Sequential() 中 :param in_channels: :param conv_blk_num: 3×3卷积层个数 :param k: = out_channels,每个3×3卷积层的输出通道数 :param bo: 是否加入 bottleneck :return: 一个 dense_block """ dense_block = nn.Sequential() for i in range(conv_blk_num): # 当前 conv_block 的输入是前面所有 conv_block 的输出堆叠起来的,所以输入通道数按照论文中这个公式变化 in_channels_ = in_channels + i * k dense_block.add_module(f'conv_blk_{i}', conv_block(in_channels_, k, bo=bo)) return dense_block -
transition_layer是 Dense Block 之间的过渡层,用 1×1 卷积减少 Dense Block 的输出通道数,否则会越叠越多,导致内存爆炸:def transition_layer(input, in_channels, out_channels): """ 过渡层,在 Dense Block 和 Dense Block 之间,把前一个的输出通道减半 :param in_channels: 前一个的输出通道 :param out_channels: 输出通道减半 :return: """ device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # 有 cuda 则使用 GPU blk = nn.Sequential(OrderedDict([ ('bn', nn.BatchNorm2d(in_channels)), ('relu', nn.ReLU()), ('conv1x1', nn.Conv2d(in_channels, out_channels, kernel_size=1)), ('avgpool', nn.AvgPool2d(2)) ])) blk.to(device) return blk(input) -
我们可以先试验一个多层 1×1 和 3×3 卷积组成的 Dense Block 的网络结构和输出特征图的形状:
def forward(x, model, transition=True): for i, blk in enumerate(model): # 遍历 dense block 的每一层卷积,把它们的输出都堆叠起来 print(i) y = blk(x) x = torch.cat((x, y), dim=1) print(x.shape) if transition: x = transition_layer(x, x.shape[1], x.shape[1]//2) print("x final size:", x.shape) return x if __name__ == '__main__': in_channels = 16 input = torch.randn(1, in_channels, 28, 28) # (mini-batch, channels, H, W) # print(input.shape) # bo=True 则加入 bottleneck,用1×1卷积减少3×3卷积的运算通道 dense_block = dense_block(in_channels=in_channels, conv_blk_num=4, k=12, bo=True) print(dense_block) # 打印网络结构 # transition=True 则把 dense_block 的输出减半 output_dense = forward(input, model=dense_block, transition=False) -
DenseNet 的基础结构由 3 个 Dense Blocks 以及可选的 Dense Block 之间的过渡层(Transition layers)组成,这些可选组件都可以通过参数来设定,因为我们已经全部实现了:
from collections import OrderedDict import torch from torch import nn from torch.nn import functional as F def transition_layer(input, in_channels, out_channels): """ 过渡层,在 Dense Block 和 Dense Block 之间,把前一个的输出通道和长宽减半 :param in_channels: 前一个的输出通道 :param out_channels: 输出通道减半 :return: """ device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # 有 cuda 则使用 GPU blk = nn.Sequential(OrderedDict([ ('bn', nn.BatchNorm2d(in_channels)), ('relu', nn.ReLU()), ('conv1x1', nn.Conv2d(in_channels, out_channels, kernel_size=1)), ('avgpool', nn.AvgPool2d(2)) ])) blk.to(device) return blk(input) def conv_block(in_channels, out_channels, bo=False): """ Dense Block 的基本组件 :param in_channels: :param out_channels: growth rate k :return: """ in_channels_ = out_channels * 2 if bo else in_channels bo_layers = nn.Sequential(OrderedDict([ ('bn0', nn.BatchNorm2d(in_channels)), ('relu0', nn.ReLU()), ('conv1x1', nn.Conv2d(in_channels, in_channels_, kernel_size=1)), ])) basic_blk = nn.Sequential(OrderedDict([ ('bn1', nn.BatchNorm2d(in_channels_)), ('relu1', nn.ReLU()), ('conv3x3', nn.Conv2d(in_channels_, out_channels, kernel_size=3, padding=1)), ])) bottleneck = bo_layers if bo else nn.Sequential() blk = nn.Sequential() blk.add_module('bottleneck', bottleneck) blk.add_module('basic_blk', basic_blk) return blk class DenseBlock(nn.Module): """ 由 conv_blk 组成 :param in_channels: 动态的,由上一个 Dense Block 和过渡层决定 :param out_channels: growth rate k :param dense_blk_num: 由多少 conv_blk 组成一个 Dense Block """ def __init__(self, in_channels, out_channels, conv_blk_num=4, bo=False, transition=True): super(DenseBlock, self).__init__() self.transition = transition self.net = nn.Sequential() for i in range(conv_blk_num): # 要多少就加多少 in_channels_ = in_channels + i * out_channels self.net.add_module(f'conv_blk_{i}', conv_block(in_channels_, out_channels, bo)) def forward(self, x): for blk in self.net: y = blk(x) x = torch.cat((x, y), dim=1) if self.transition: out_channels = x.shape[1] x = transition_layer(x, out_channels, out_channels // 2) print(x.shape) return x class DenceNet(nn.Module): """ 由 Dense Block 组成 :param in_channels: 3-cifar-10, 1-mnist :param out_channels: growth rate k :param dense_blk_num: 由多少 Dense Block 组成 """ def __init__(self, in_channels=16, out_channels=12, conv_blk_num=4, dense_blk_num=3, bo=False, transition=True): super(DenceNet, self).__init__() self.bn0 = nn.BatchNorm2d(3) self.conv0 = nn.Conv2d(3, 16, kernel_size=3, padding=1) self.dense_net = nn.Sequential() in_channels_ = in_channels for i in range(dense_blk_num): # 计算通道数,有点绕,想搞清楚可以手动遍历 in_channels_ += conv_blk_num * out_channels if i > 0 else 0 in_channels_ = in_channels_ // 2 if i > 0 else in_channels_ print("in_channels_:", in_channels_) if transition: self.is_transition = dense_blk_num - 1 - i # 最后一个 dense Block 不用接过渡层 self.dense_net.add_module(f"dense_blk_{i}", DenseBlock(in_channels_, out_channels, conv_blk_num=conv_blk_num, bo=bo, transition=self.is_transition)) self.aap = nn.AdaptiveAvgPool2d(10) # 全局平均池化,输出 10×10 self.fc = nn.Linear(8800, 10) def forward(self, x): batch_size = x.size(0) x = self.conv0(F.relu(self.bn0(x))) # N,16,, x = self.dense_net(x) x = self.aap(x) x = x.view(batch_size, -1) # batch×通道数×10×10=8800 x = F.softmax(self.fc(x)) return x if __name__ == '__main__': # 模拟数据输入网络 in_channels, k = 16, 12 model = DenceNet(in_channels=in_channels, out_channels=k, conv_blk_num=4, # 每个Dense Block中的3×3卷积个数 dense_blk_num=3, # 每个DenseNet包含的Dense Block个数 bo=False, transition=True ) print(model) input = torch.randn(1, 3, 32, 32) output = model(input) print("final x shape:", output.shape)
Tips:在不知道全连接层接收的参数到底为多少的情况下(比如,这里的8800),我们可以注释掉
self.fc()的调用,然后构造和训练数据集一个 mini-batch 相同大小的数据作为 input,得到的输出很轻易能告诉你答案。
六、实验结果
完整代码参见:dense_net.py
DenseNet 参数量不大,相同深度比 ResNet 的参数还少,这是参数共享的好处,但不断堆叠的特征导致了内存消耗很大,训练要很久。
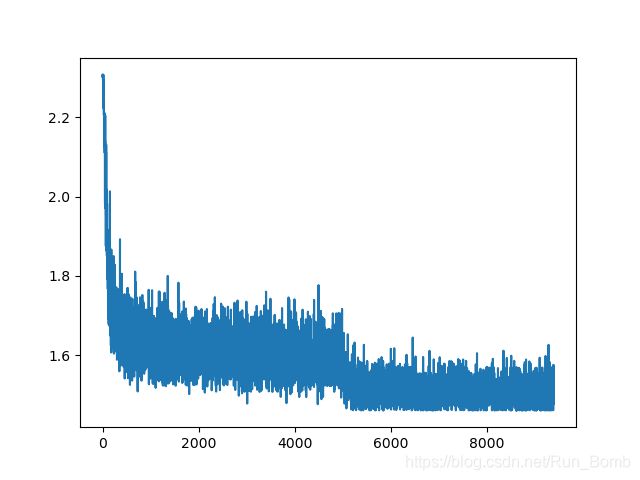
下面是我用 Tesla T4 GPU 在 MNIST 数据集上训练 10 个 epochs 的实验结果,训练精度 0.96,后面的在测试集上的测试精度也是 0.96,至少说明没有过拟合,盲猜再多训练 10 个 epochs 能达到最佳。
-
训练精度和 loss 曲线

-
预测结果

Huang, Gao, et aI. “Densely Connected Convolutional Networks.” IEEE Conference on Computer Vision Pattern Recognition (2017): 2261-69. ↩︎
DenseNet算法详解 ↩︎