ROS中Navigation功能包里路径规划A*算法详解
一、下载编译功能包
cd ~/catkin_ws/src
sudo apt-get install https://github.com/ros-planning/navigation
cd ..
catkin_make
二、功能包里涵盖的文件

| 功能包 | 功能 |
|---|---|
| acml | 定位算法 |
| move_base | navigation中最主要的框架 |
| base_local_planner | 局部路径规划器 |
| dwa_local_planner | dwa算法局部路径规划实现 |
| global_planner | 全局路径规划 |
| navfn | 全局路径规划,旧版本的,有bug |
| carrot_planner | 一个简单的全局路径规划器 |
| clear_costmap_recovery | 清除代价地图的恢复行为 |
| costmap_2d | 实现2d代价地图 |
| fake_localization | acml的API接口 |
| map_server | 提供地图数据,yaml或者是image |
| move_slow_and_clear | 缓慢移动修复机制,会限制机器人速度 |
| nav_core | 路径规划接口类 |
| rotate_recovery | 旋转恢复 |
| voxel_grid | 三维代价地图 |
全局规划器有 3 个:
(1)carrot_planner
carrot_planner 检查需要到达的目标是不是一个障碍物,如果是一个障碍物,它就将目标点替换成一个附近可接近的点。因此,这个模块其实并没有做任何全局规划的工作。在复杂的室内环境中,这个模块并不实用。
(2)navfn
navfn使用 Dijkstra 算法找到最短路径。
(3)global planner
global planner是navfn的升级版。
它相对于navfn增加了更多的选项:支持 A* 算法;可以切换二次近似;切换网格路径;
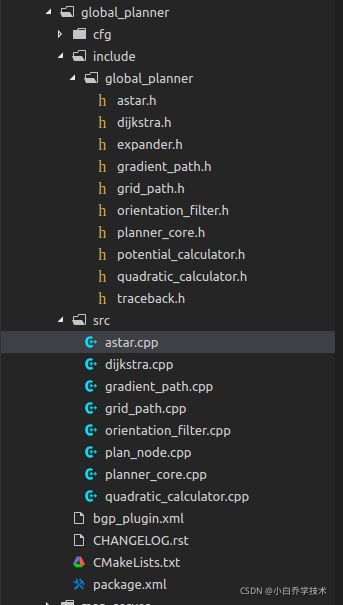
三、Global Planner 全局路径规划
该文件下的内容:10个头文件,8个源文件
看其中A*算法的文件
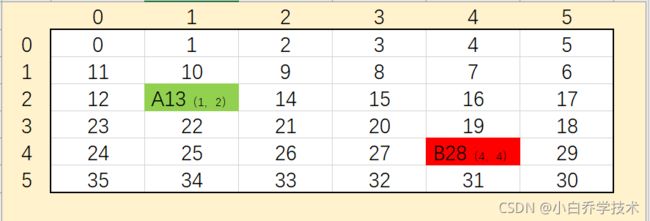
先做一个算例,结合算例理解
以下文件会包含其他文件,需要整体看,这里先整理三个文件,其他的慢慢来
1、astar.h
#ifndef _ASTAR_H
#define _ASTAR_H
#include 2、astar.cpp
#include3、potential_calculate.h
neutral_cost_ 设定的一个默认值,为50
calculatePotential()计算根据use_quadratic的值有下面两个选择:
若为TRUE, 则使用二次曲线计算
若为False, 则采用简单方法计算, return prev_potential + cost。即:costs[next_i] + neutral_cost_+ prev_potential
地图代价+单格距离代价(初始化为50)+之前路径代价为G
#ifndef _POTENTIAL_CALCULATOR_H
#define _POTENTIAL_CALCULATOR_H
#include