新的损失函数SIoU:结合图片和详细代码分块深入理解原理
一、前言
原文地址https://arxiv.org/abs/2205.12740
SIoU进一步考虑了真实框和预测框之间的向量角度,重新定义相关损失函数,具体包含四个部分:角度损失(Angle cost)、距离损失(Distance cost)、形状损失(Shape cost)、IoU损失(IoU cost)。
二、分块分析
1、角度损失(Angle cost)
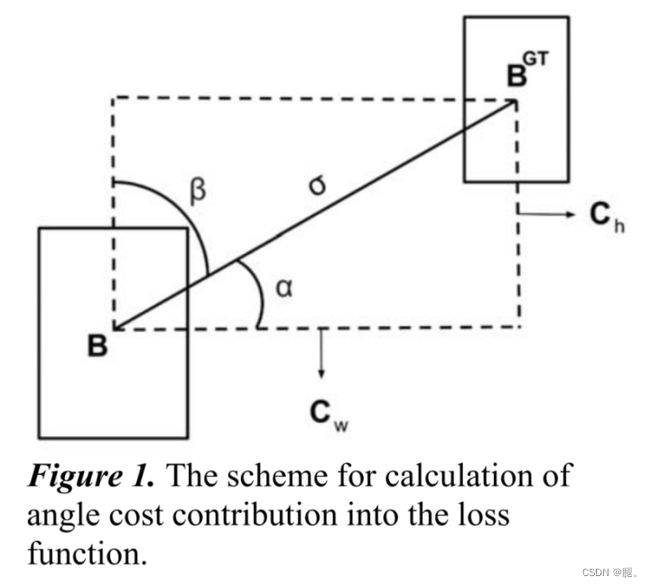

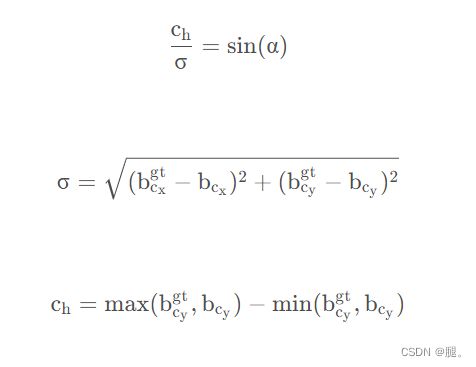
sin( )看公示可以知道,就是直角三角形中的对边比斜边,在训练过程中若α大于45°则取β,否则取α。
)看公示可以知道,就是直角三角形中的对边比斜边,在训练过程中若α大于45°则取β,否则取α。
 为真实框和预测框中心点的距离。
为真实框和预测框中心点的距离。
![]() 为真实框和预测框中心点的高度差,代码中直接使用勾股定理求得。
为真实框和预测框中心点的高度差,代码中直接使用勾股定理求得。
![]() ,
, ![]() 为真实框中心坐标,
为真实框中心坐标,![]() ,
,![]() 为预测框中心坐标
为预测框中心坐标
import torch
import math
# [[x, y, w, h]]
# [[x, y, w, h]] : 中心点坐标和宽高
pred = torch.tensor([[1, 2, 3, 4]])
gt = torch.tensor([[5, 6, 7, 8]])
iou = 0.5 # 这里设置iou为0.5
def siou1():
# --------------------角度损失(Angle cost)------------------------------
gt_p_center_D_value_w = torch.abs((gt[:, 0] - pred[:, 0])) # 真实框和预测框中心点的宽度差
gt_p_center_D_value_h = torch.abs((gt[:, 1] - pred[:, 1])) # 真实框和预测框中心点的高度差
sigma = torch.pow(gt_p_center_D_value_w ** 2 + gt_p_center_D_value_h ** 2, 0.5) # 真实框和预测框中心点的距离
sin_alpha = torch.abs(gt_p_center_D_value_w) / sigma # 真实框和预测框中心点的夹角α
sin_beta = torch.abs(gt_p_center_D_value_h) / sigma # 真实框和预测框中心点的夹角β
threshold = torch.pow(torch.tensor(2.), 0.5) / 2 # 夹角阈值 0.7071068 = sin45° = 二分之根二
# torch.where(condition,a,b)其中
# 输入参数condition:条件限制,如果满足条件,则选择a,否则选择b作为输出。
sin_alpha = torch.where(sin_alpha > threshold, sin_beta, sin_alpha) # α大于45°则考虑优化β,否则优化α
angle_cost = torch.cos(2 * (torch.arcsin(sin_alpha) - math.pi / 4))2、距离损失(Distance cost)
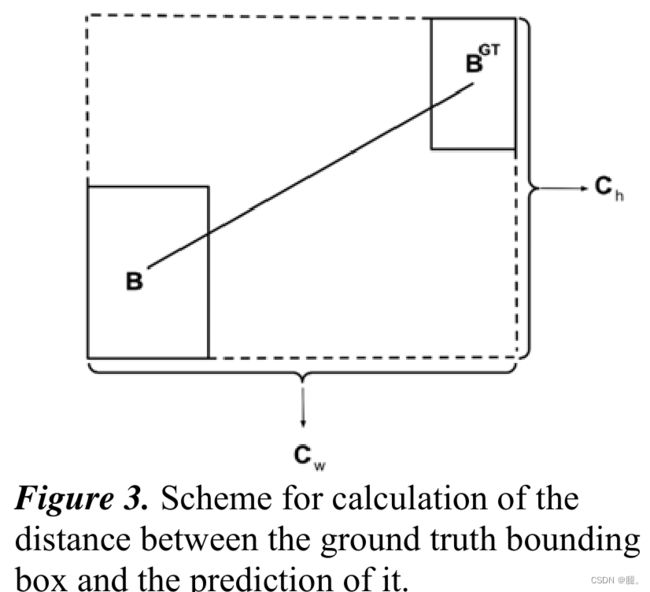
与真实框和预测框的最小外接矩形有关
![]() ,
,![]() 为真实框和预测框最小外接矩形的宽和高
为真实框和预测框最小外接矩形的宽和高
# -----------------距离损失(Distance cost)-----------------------------
# min_enclosing_rec_tl:最小外接矩形左上坐标
# min_enclosing_rec_br:最小外接矩形右下坐标
min_enclosing_rec_tl = torch.min(
(pred[:, :2] - pred[:, 2:] / 2), (gt[:, :2] - gt[:, 2:] / 2))
min_enclosing_rec_br = torch.max(
(pred[:, :2] + pred[:, 2:] / 2), (gt[:, :2] + gt[:, 2:] / 2))
# 最小外接矩形的宽高
min_enclosing_rec_br_w = (min_enclosing_rec_br - min_enclosing_rec_tl)[:, 0]
min_enclosing_rec_br_h = (min_enclosing_rec_br - min_enclosing_rec_tl)[:, 1]
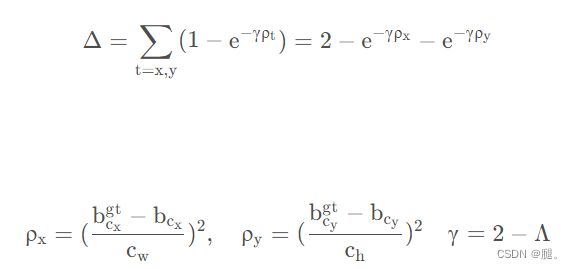
# 真实框和预测框中心点的宽度(高度)差 / 以最小外接矩形的宽(高) 的平方
rho_x = (gt_p_center_D_value_w / min_enclosing_rec_br_w) ** 2
rho_y = (gt_p_center_D_value_h / min_enclosing_rec_br_h) ** 2
gamma = 2 - angle_cost
# 距离损失
distance_cost = 2 - torch.exp(-gamma * rho_x) - torch.exp(-gamma * rho_y)
3、形状损失(Shape cost)
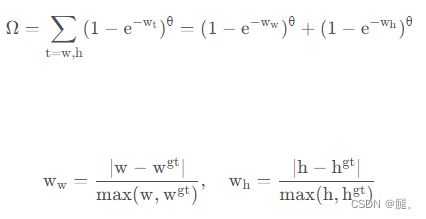
w,h,![]() ,
,![]() 分别为预测框和真实框的宽和高,
分别为预测框和真实框的宽和高, 控制对形状损失的关注程度,为了避免过于关注形状损失而降低对预测框的移动,作者使用遗传算法计算出接近4,因此作者定于参数范围为[2, 6]
控制对形状损失的关注程度,为了避免过于关注形状损失而降低对预测框的移动,作者使用遗传算法计算出接近4,因此作者定于参数范围为[2, 6]
# ----------------形状损失(Shape cost)----------------------
w_pred = pred[:, 2] # 预测框的宽
w_gt = gt[:, 2] # 真实框的宽
h_pred = pred[:, -1] # 预测框的高
h_gt = gt[:, -1] # 真实框的高
# 预测框的宽 - 真实框的宽的绝对值 / 预测框的宽和真实框的宽中的最大值
omiga_w = torch.abs(w_pred - w_gt) / torch.max(w_pred, w_gt)
omiga_h = torch.abs(h_pred - h_gt) / torch.max(h_pred, h_gt)
# 作者使用遗传算法计算出θ接近4,因此作者定于θ参数范围为[2, 6]
theta = 4
# 形状损失
shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), theta) + torch.pow(1 - torch.exp(-1 * omiga_h), theta)
4、IoU损失(IoU cost)
可以看看之前的学习随笔
通过PYTHON画图来理解IOU的计算(学习随笔)
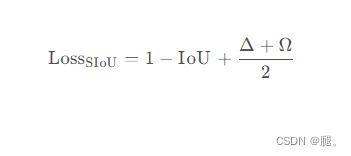
5、最终SIoU损失函数定义如下:
三、完整代码(可直接运行)
import torch
import math
# [[x, y, w, h]]
# [[x, y, w, h]] : 中心点坐标和宽高
pred = torch.tensor([[1, 2, 3, 4]])
gt = torch.tensor([[5, 6, 7, 8]])
iou = 0.5 # 这里设置iou为0.5
def siou1():
# --------------------角度损失(Angle cost)------------------------------
gt_p_center_D_value_w = torch.abs((gt[:, 0] - pred[:, 0])) # 真实框和预测框中心点的宽度差
gt_p_center_D_value_h = torch.abs((gt[:, 1] - pred[:, 1])) # 真实框和预测框中心点的高度差
sigma = torch.pow(gt_p_center_D_value_w ** 2 + gt_p_center_D_value_h ** 2, 0.5) # 真实框和预测框中心点的距离
sin_alpha = torch.abs(gt_p_center_D_value_w) / sigma # 真实框和预测框中心点的夹角β
sin_beta = torch.abs(gt_p_center_D_value_h) / sigma # 真实框和预测框中心点的夹角α
threshold = torch.pow(torch.tensor(2.), 0.5) / 2 # 夹角阈值 0.7071068 = sin45° = 二分之根二
# torch.where(condition,a,b)其中
# 输入参数condition:条件限制,如果满足条件,则选择a,否则选择b作为输出。
sin_alpha = torch.where(sin_alpha > threshold, sin_beta, sin_alpha) # α大于45°则考虑优化β,否则优化α
# angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2) # 角度损失
angle_cost = torch.cos(2 * (torch.arcsin(sin_alpha) - math.pi / 4))
# -----------------距离损失(Distance cost)-----------------------------
# min_enclosing_rec_tl:最小外接矩形左上坐标
# min_enclosing_rec_br:最小外接矩形右下坐标
min_enclosing_rec_tl = torch.min(
(pred[:, :2] - pred[:, 2:] / 2), (gt[:, :2] - gt[:, 2:] / 2))
min_enclosing_rec_br = torch.max(
(pred[:, :2] + pred[:, 2:] / 2), (gt[:, :2] + gt[:, 2:] / 2))
# 最小外接矩形的宽高
min_enclosing_rec_br_w = (min_enclosing_rec_br - min_enclosing_rec_tl)[:, 0]
min_enclosing_rec_br_h = (min_enclosing_rec_br - min_enclosing_rec_tl)[:, 1]
# 真实框和预测框中心点的宽度(高度)差 / 以最小外接矩形的宽(高) 的平方
rho_x = (gt_p_center_D_value_w / min_enclosing_rec_br_w) ** 2
rho_y = (gt_p_center_D_value_h / min_enclosing_rec_br_h) ** 2
gamma = 2 - angle_cost
# 距离损失
distance_cost = 2 - torch.exp(-gamma * rho_x) - torch.exp(-gamma * rho_y)
# ----------------形状损失(Shape cost)----------------------
w_pred = pred[:, 2] # 预测框的宽
w_gt = gt[:, 2] # 真实框的宽
h_pred = pred[:, -1] # 预测框的高
h_gt = gt[:, -1] # 真实框的高
# 预测框的宽 - 真实框的宽的绝对值 / 预测框的宽和真实框的宽中的最大值
omiga_w = torch.abs(w_pred - w_gt) / torch.max(w_pred, w_gt)
omiga_h = torch.abs(h_pred - h_gt) / torch.max(h_pred, h_gt)
# 作者使用遗传算法计算出θ接近4,因此作者定于θ参数范围为[2, 6]
theta = 4
# 形状损失
shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), theta) + torch.pow(1 - torch.exp(-1 * omiga_h), theta)
#------------------loss_siou----------------------------
siou = 1.0 - iou + 0.5 * (distance_cost + shape_cost)
print(siou)
siou1()