HNSW算法详解
目录
1. 数据结构
2. 添加节点
3. 更新节点
4. 搜索节点
4.1 第0层以上
4.2 第0层
5. 总结
文章略长,建议先收藏,慢慢品~
基于图的向量检索算法在向量检索的评测中性能都是比较优异的。如果比较在乎检索算法的效率,而且可以容忍一定的空间成本,多数场景下比较推荐基于图的检索算法。而HNSW是一种典型的,应用广泛的图算法,很多分布式检索引擎都对HNSW算法进行了分布式改造,以应用于高并发,大数据量的线上查询。本文将结合hnswlib的源码,对HNSW算法进行详细的阐述。
1. 数据结构
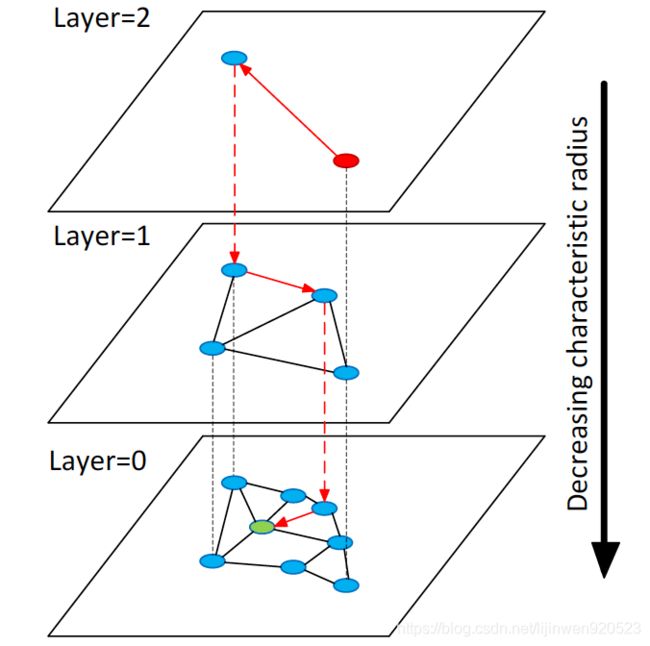 HNSW结构
HNSW结构
HNSW将空间中的向量按上图的形式组织,每一个节点插入时,首先将数据保存在第0层。然后随机一个层数,从该层开始逐层往下遍历,每层都将该节点(以节点内部id代表)插入,并按一定规则(后文介绍)连接M个近邻节点,直至第0层。
HNSW主要用到了两块内存来表示如上图所示的结构。data_level0_memory_以及linkLists_。两者的内部结构如下图所示:
 HNSW内存结构
HNSW内存结构
data_level0_memory_存储节点的数据以及第0层的邻居关系,每个节点的数据主要包括:邻居的数量(size),flag,保留的一个字节,邻居节点的id,自己的data数据,以及一个label(插入节点时可指定的一个代号)。
linkLists_是一个二维数组,其中的每一行代表一个节点从第1层到maxLevel层每一层的邻居关系。每个节点每一层的数据结构主要包括:邻居的数量(size),保留的两个字节,以及该层的邻居的id。
具体的结构代码如下:
size_links_level0_ = maxM0_ * sizeof(tableint) + sizeof(linklistsizeint); //jeven: size of graph link of each element in level 0
size_data_per_element_ = size_links_level0_ + data_size_ + sizeof(labeltype); //jeven: size of each element
offsetData_ = size_links_level0_;
label_offset_ = size_links_level0_ + data_size_;
offsetLevel0_ = 0;
data_level0_memory_ = (char *) malloc(max_elements_ * size_data_per_element_); // jeven: total memory of level 0
if (data_level0_memory_ == nullptr)
throw std::runtime_error("Not enough memory");
linkLists_ = (char **) malloc(sizeof(void *) * max_elements_);
if (linkLists_ == nullptr)
throw std::runtime_error("Not enough memory: HierarchicalNSW failed to allocate linklists");
size_links_per_element_ = maxM_ * sizeof(tableint) + sizeof(linklistsizeint);2. 添加节点
添加节点时,先检查一下该节点的label是否已经存在了,如果存在的话,直接更新节点,下一节会详细介绍。如果不存在,则直接添加节点。主要步骤为:
- 节点id自增加1
- 随机初始化层数 curlevel
- 初始化节点相关数据结构,主要包括:将节点数据以及label拷贝到第0层数据结构(data_level0_memory_)中;为该节点分配存储0层以上的邻居关系的结构,并将其地址存储在linkLists_中
- 如果这是第一个元素,只需将该节点作为HNSW的entrypoint,并将该元素的层数作为当前的最大层。
- 如果不是第一个元素:1)那么从当前图的从最高层逐层往下寻找直至节点的层数+1停止,寻找到离data_point最近的节点,作为下面一层寻找的起始点。2)从curlevel依次开始往下,每一层寻找离data_point最接近的ef_construction_(构建HNSW是可指定)个节点构成候选集,再从候选集中选择M个节点与data_point相互连接。至于如何寻找ef_construction_个候选节点,在后文搜索节点一节中解释。
主要代码如下,注释中均按上面相应的步骤注明:
// jeven: 1. 节点编号id自增,为cur_c
cur_c = cur_element_count;
cur_element_count++;
label_lookup_[label] = cur_c;
// jeven: 2. 随机初始化层数
int curlevel = getRandomLevel(mult_);
element_levels_[cur_c] = curlevel;
// jeven: 3. 初始化节点相关数据结构
memset(data_level0_memory_ + cur_c * size_data_per_element_ + offsetLevel0_, 0, size_data_per_element_);
memcpy(getExternalLabeLp(cur_c), &label, sizeof(labeltype));
memcpy(getDataByInternalId(cur_c), data_point, data_size_);
if (curlevel) {
linkLists_[cur_c] = (char *) malloc(size_links_per_element_ * curlevel + 1);
if (linkLists_[cur_c] == nullptr)
throw std::runtime_error("Not enough memory: addPoint failed to allocate linklist");
memset(linkLists_[cur_c], 0, size_links_per_element_ * curlevel + 1);
}
// jeven: 5.待添加的节点不是第一个元素
if ((signed)currObj != -1) {
if (curlevel < maxlevelcopy) {
dist_t curdist = fstdistfunc_(data_point, getDataByInternalId(currObj), dist_func_param_);
for (int level = maxlevelcopy; level > curlevel; level--) {
// jeven: 5.1 逐层往下寻找直至curlevel+1,找到最近的节点
......
}
}
// jeven: 5.2 从curlevel往下,找一定数量的邻居并连接
for (int level = std::min(curlevel, maxlevelcopy); level >= 0; level--) {
std::priority_queue, std::vector>, CompareByFirst> top_candidates = searchBaseLayer(currObj, data_point, level);
currObj = mutuallyConnectNewElement(data_point, cur_c, top_candidates, level, false); // jeven: 连接节点与邻居
}
} else {
// jeven: 4. 只需更新起始点和最大层
// Do nothing for the first element
enterpoint_node_ = 0;
maxlevel_ = curlevel;
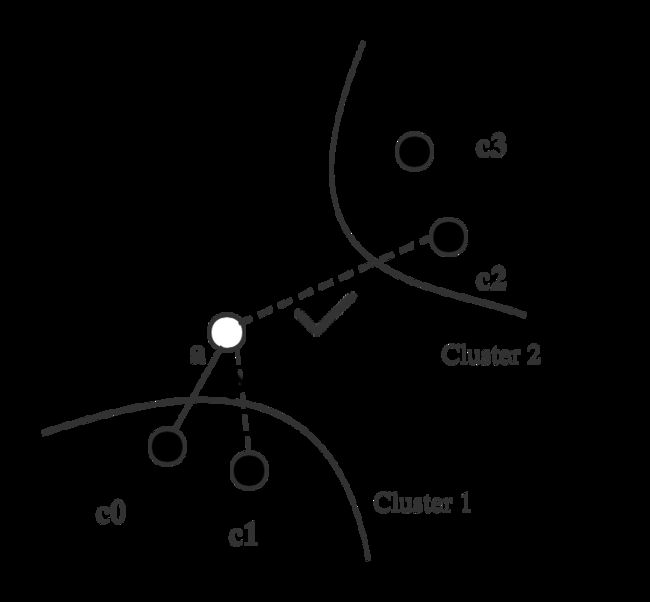
} 这里值得注意的一点是 :若候选集(top_candidates)中节点的数量大于M时,如何从中选择M个节点与data_point相连。首先容易想到的是从候选集中选择最近的M个点。这样有一个问题,就是容易形成孤岛。如下图所示,a点为将要插入的点。假设M为2,如果找寻最近的2个黑色的点与之相连,则黑色的点肯定在cluster1中,这样就造成cluster1与cluster2分裂,最终构成的图也不是连通图,会影响搜索结果。
 启发式搜索
启发式搜索
为了防止cluster分裂,hnswlib采用一种叫启发式搜索的方法。每选择一个节点时,都要看此节点到目标节点a的距离是否比此节点到所有已选中的节点远,如果远,则选中它。上图中先选c0,计算c1时,因为它距离c0比距离a近,所以可能c0和c1属于一个集群,故不选它,而选择c2。 现假设c0~c3都在候选集中,从中选择两个节点相连。详细步骤如下:
- 先将c0~c3按照到a点的距离从近到远排序,为c0, c1,c2,c3,放在队列queue中。
- 从队列中依次取出一个节点,第一次取c0,将c0选为a的邻居,先存在return_list中。
- 再从队列中取出下一个节点c1,计算出c1到a点的距离d1。依次计算return_list中已选中的所有节点(也就是c0)到a点的距离,并与d1相比较,发现c0和c1更近,因此不选c1
- 在从队列中取出一个节点c2,计算出c2到a点的距离d2。依次计算return_list中已选中的所有节点(也就是c0)到a点的距离,并与d2相比较,发现c0和c2更远,选中c2
- 至此,return_list的size为2,结束筛选。
代码如下:
void getNeighborsByHeuristic2(std::priority_queue, std::vector>,
CompareByFirst> &top_candidates, const size_t M) {
if (top_candidates.size() < M) {
return;
}
// jeven:入队列
std::priority_queue> queue_closest;
std::vector> return_list;
while (top_candidates.size() > 0) {
queue_closest.emplace(-top_candidates.top().first, top_candidates.top().second);
top_candidates.pop();
}
while (queue_closest.size()) {
if (return_list.size() >= M)
break;
std::pair curent_pair = queue_closest.top();
dist_t dist_to_query = -curent_pair.first; //jeven: distance between new point and current point
queue_closest.pop();
bool good = true;
// jeven: compare with distances of selected points to current point
for (std::pair second_pair : return_list) {
dist_t curdist =
fstdistfunc_(getDataByInternalId(second_pair.second),
getDataByInternalId(curent_pair.second),
dist_func_param_);;
if (curdist < dist_to_query) { // jeven: 如果当前节点到某一个已选中的节点比到新增节点近,则淘汰掉
good = false;
break;
}
}
if (good) {
return_list.push_back(curent_pair);
}
}
for (std::pair curent_pair : return_list) {
top_candidates.emplace(-curent_pair.first, curent_pair.second);
}
} 3. 更新节点
上一节提到,插入节点时,如果节点的label已经存在了,那么直接更新节点。更新节点主要分为三步:
- 更新节点的数据;
- 从0层逐层往上,直至该节点的最高层,在每一层取待更新节点的部分邻居,更新它们的邻居;
- 从上往下依次更新待更新节点的邻居。
第一步很简单,直接把数据拷贝到0层相应的位置即可:
memcpy(getDataByInternalId(internalId), dataPoint, data_size_);第二步,更新原来的部分邻居的邻居。
std::unordered_set sCand;
std::unordered_set sNeigh; // jeven: store part of original neighbors need to be updated
std::vector listOneHop = getConnectionsWithLock(internalId, layer); // jeven: get original neighbors
if (listOneHop.size() == 0)
continue;
sCand.insert(internalId);
for (auto&& elOneHop : listOneHop) {
sCand.insert(elOneHop); // jeven: store nodes of one hop into sCand
// jeven: choose part of neighbors to update, updateNeighborProbability belongs to [0,1.0], if updateNeighborProbability is 1.0, all neighbors will be updated
if (distribution(update_probability_generator_) > updateNeighborProbability)
continue;
// jeven: store part(0~100%) of original one hops into sNeigh, and get two-hop of them into sCand
sNeigh.insert(elOneHop);
std::vector listTwoHop = getConnectionsWithLock(elOneHop, layer);
for (auto&& elTwoHop : listTwoHop) {
sCand.insert(elTwoHop);
}
}
// jeven: part of one-hops
for (auto&& neigh : sNeigh) {
// if (neigh == internalId)
// continue;
std::priority_queue, std::vector>, CompareByFirst> candidates;
size_t size = sCand.find(neigh) == sCand.end() ? sCand.size() : sCand.size() - 1; // sCand guaranteed to have size >= 1
size_t elementsToKeep = std::min(ef_construction_, size);
for (auto&& cand : sCand) {
if (cand == neigh)
continue;
dist_t distance = fstdistfunc_(getDataByInternalId(neigh), getDataByInternalId(cand), dist_func_param_);
if (candidates.size() < elementsToKeep) {
candidates.emplace(distance, cand);
} else {
if (distance < candidates.top().first) {
candidates.pop();
candidates.emplace(distance, cand);
}
}
}
// Retrieve neighbours using heuristic and set connections.
getNeighborsByHeuristic2(candidates, layer == 0 ? maxM0_ : maxM_);
{
std::unique_lock lock(link_list_locks_[neigh]);
linklistsizeint *ll_cur;
ll_cur = get_linklist_at_level(neigh, layer);
size_t candSize = candidates.size();
setListCount(ll_cur, candSize);
tableint *data = (tableint *) (ll_cur + 1);
for (size_t idx = 0; idx < candSize; idx++) {
data[idx] = candidates.top().second;
candidates.pop();
}
}
} for循环遍历每一层,在for循环里面,首先挑部分原来的邻居,存储在 sNeigh里面, 比例由参数updateNeighborProbability控制。而将待更新节点经过一跳,二跳到达的节点存在sCand里面,供后面更新邻居的时候选择。
然后,对sNeigh中每一个选中的待更新的邻居n,利用启发式搜索(getNeighborsByHeuristic2)在sCand中选出最多M个点,将它们作为n的邻居存储在n的数据结构对应的位置。
第三步,更新待更新节点data_point的邻居。这个与添加节点类似:从当前图的从最高层逐层往下寻找直至节点的层数+1停止,寻找到离data_point最近的节点,作为下面一层寻找的起始点。2)从data_point的最高层依次开始往下,每一层寻找离data_point最接近的ef_construction_(构建HNSW是可指定)个节点构成候选集,再从候选集中利用启发式搜索选择M个节点与data_point相互连接.
4. 搜索节点
当我们构建好HNSW之后,就可以查询了,也就是给定一个向量(目标),搜索最近的k个向量。也就是寻找图中,离目标点最近的k个点。HNSW利用分层的特性,先从最高层的入口点(enterpoint)开始,每一层寻找离目标点最近的点,作为下一层的入口,知道第0层。那么第0层的入口已经离目标向量很近了,所以后面的搜索就快多了。这里分两步来介绍:
- 0层以上,从enterpoint开始,寻找离目标最近的点。
- 0层,寻找最近的k个点。
4.1 第0层以上
0层以上比较简单,从enterpoint开始,遍历它的邻居,从邻居(包括自己)中找到离目标最近的点a。如果点a不是enterpoint,则下一次从点a开始以同样的模式搜索。如果点a和enterpoint是同一个点,也就是说,它的邻居包括自己所有点中,自己是离目标最近的点,则该层搜索结束。
 0层以上搜索
0层以上搜索
以上图为例,假设c0为enterpoint,白色点e为目标。则先计算c0和c0的邻居(c1,c2)到e的距离,找到离e最近的点,是c2。因为c0和c2不是同一个点,那么现在以c2为当前点,计算它的邻居(含c2)中离目标最近的,是c3。现在,以c3为当前点,找寻它的邻居(含c3)中离目标最近的点,是自己。那么这一层搜索结束。c3作为下一层的enterpoint开始继续去下一层搜索。
0层以上的搜索代码如下:
tableint currObj = enterpoint_node_;
dist_t curdist = fstdistfunc_(query_data, getDataByInternalId(enterpoint_node_), dist_func_param_);
for (int level = maxlevel_; level > 0; level--) {
bool changed = true;
while (changed) {
changed = false;
unsigned int *data;
data = (unsigned int *) get_linklist(currObj, level);
int size = getListCount(data);
metric_hops++;
metric_distance_computations+=size;
tableint *datal = (tableint *) (data + 1);
/*
jeven: the for loop finds the nearest node in the current level,
set the nearest obj into currObj, nearest dis to curdist
*/
for (int i = 0; i < size; i++) {
tableint cand = datal[i];
if (cand < 0 || cand > max_elements_)
throw std::runtime_error("cand error");
dist_t d = fstdistfunc_(query_data, getDataByInternalId(cand), dist_func_param_);
if (d < curdist) {
curdist = d;
currObj = cand;
changed = true;
}
}
}
}
// jeven: until here, fins the nearest node, assign to currObj4.2 第0层
经过第0层以上的搜索后,基本0层的入口点离目标比较接近了。那么在第0层,就要从入口点开始,找到离目标最近的不多于ef_construction个点,再从中选择最近的k个点返回。如何寻找最近的ef_construction个点,这个在前面几节多次提到。
简单的思想是:维护一个长度不大于ef_construction的动态list,记为W。每次从动态list中取最近的点,遍历它的邻居节点,如果它的邻居没有被遍历过,那么当结果集小于ef_construction,或者该节点比结果集中最远的点离目标近时,则把它添加到W中,如果该点没有被标记为删除,则添加到结果集。如果添加后结果集数量多于ef_construction,则把最远的pop出来。此种思想有点类似于BFS,只不过不同的是,这里的动态list是一个优先级队列,每次pop的是离目标最近的点。另外,结果集的数量有一个上限,需要不断的更新里面的点。
// jeven: 记录遍历过的节点
visited_array[ep_id] = visited_array_tag;
// jeven: 停止条件:动态list为空,前面把enterpoint已经添加进来了
while (!candidate_set.empty()) {
// jeven:弹出当前最近的点
std::pair current_node_pair = candidate_set.top();
if ((-current_node_pair.first) > lowerBound) {
break;
}
candidate_set.pop();
tableint current_node_id = current_node_pair.second;
int *data = (int *) get_linklist0(current_node_id);
size_t size = getListCount((linklistsizeint*)data);
// jeven: 遍历当前点的邻居
for (size_t j = 1; j <= size; j++) {
int candidate_id = *(data + j);
// 如果当前点已经遍历过,则跳过
if (!(visited_array[candidate_id] == visited_array_tag)) {
// jeven: 将该点标记为遍历过
visited_array[candidate_id] = visited_array_tag;
char *currObj1 = (getDataByInternalId(candidate_id));
dist_t dist = fstdistfunc_(data_point, currObj1, dist_func_param_);
// jeven: 如果结果集的size小于ef,或者该点距离小于结果集中的最大值
if (top_candidates.size() < ef || lowerBound > dist) {
candidate_set.emplace(-dist, candidate_id);
if (!has_deletions || !isMarkedDeleted(candidate_id))
top_candidates.emplace(dist, candidate_id);
if (top_candidates.size() > ef)
top_candidates.pop();
// jeven: 更新当前结果集中离目标最远的距离
if (!top_candidates.empty())
lowerBound = top_candidates.top().first;
}
}
}
}
return top_candidates; 5. 总结
- HNSW采用类似跳表的思想,在高层跳过大量离目标点较远的点,从而快速定位到离目标较近的点,从而缩小搜索范围。
- HNSW在构图时采用启发式搜索选择连接邻居节点,从而防止出现不连通图的情况。
- 搜索过程中维护动态list,从而减少遗漏的情况。
但是HNSW的缺点就是,除了保存数据之外,还需要一定的内存维护图的关系,而且每个节点分配固定的内存,其中有些没有使用而造成一定的浪费。