yolov5s模型转tensorrt+deepstream检测+CSI和USB摄像头检测
软硬件版本
ubuntu 18.04
Jetson Nano 4G
JP 4.5.1
CUDA 10.2
TensorRT 7.1.3.0
python 3.6
前言
把自己训练好的yolov5s.pt转为tensorrt模型是为了实现推理加速,过程也非常简单,不过有一点就是网上的教程很多但是yolov5的代码版本也有很多,所以导致很多操作有一些不同,所以建议直接去大佬的开源看他的readme,下面我就来说一下我yolov5-5.0的转换过程
以下步骤都是在jetson nano上进行
一、安装pycuda
sudo pip3 install pycuda
这里我直接安装出现了错误

安装不上,于是我们只能进行自己编译安装
安装前先配置环境
$ sudo nano ~/.bashrc
export PATH=/usr/local/cuda-10.2/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH
export CUDA_HOME=$CUDA_HOME:/usr/local/cuda-10.2
$ sudo source ~/.bashrc
$ nvcc -V 检测一下是否配置成功
我们首先下载https://files.pythonhosted.org/packages/5e/3f/5658c38579b41866ba21ee1b5020b8225cec86fe717e4b1c5c972de0a33c/pycuda-2019.1.2.tar.gz
然后进行解压安装一系列操作
我这里是在电脑上解压的然后把解压出来的文件夹传到了nano上
cd pycuda-2019.1.2/ #这一步是进入解压出来的文件夹里面
python3 configure.py --cuda-root=/usr/local/cuda-10.2 #下面这两步是进行编译安装
sudo python3 setup.py install
安装成功显示

详细步骤大家也可以参考:
jetson nano安装pycuda!!!_帅的发光发亮的博客-CSDN博客
二、克隆tensorrtx源码和yolov5源码
git clone https://github.com/wang-xinyu/tensorrtx.git
git clone -b v5.0 https://github.com/ultralytics/yolov5.git三、生成yolov5s.wts文件
1.进入tensorrtx文件夹下的yolov5文件再,找到gen_wts.py,并把它复制到我们刚才下载的yolov5-5.0中
2.
cd yolov5-5.0 #进入这个文件夹下3.把我们训练好的best.pt尽量改名为yolov5s.pt并复制到yolov5-5.0根目录下
输入如下命令生成wts文件
sudo python3 gen_wts.py -w yolov5s.pt -o yolov5s.wts现在就在yolov5-5.0中生成一个yolov5s.wts文件
四、生成engine文件
1.进入tenorrtx/yolov5文件夹中进行编译
先将yololayer.h里的CLASS_NUM修改成你的。因为官方用的是coco数据集,所以默认是80。
然后开始编译
mkdir build #创建build文件夹
将第三步生成的.wts文件复制到tensorrtx/yolov5/build里。
cd build
cmake .. #一定要注意是cmake空格..
make #每次修改为CLASS_NUM都要make一次

make成功

2. 将第三步生成的.wts文件复制到tensorrtx/yolov5里。
3.生成.engine文件(我用的是yolov5s,所以结尾用s)
sudo ./yolov5 -s yolov5s.wts yolov5s.engine s4.用它自带的图片测试一下
sudo ./yolov5 -d yolov5s.engine ../samples接下来进行yolov5s.engine的调用USB摄像头检测(不使用deepstream)!!!
1.我们上面已经生成了yolov5s.engine,现在对yolov5.cpp进行魔改(注意是先要原来的yolo.cpp生成engine文件,然后再修改编译调用USB)
以下代码的借用这位大哥改好的,Jetson nano + yolov5 + TensorRT加速+调用usb摄像头_hahasl555的博客-CSDN博客
打开yolov5.cpp

2.把下面这个代码直接替换原来的yolov5.cpp
#include
#include
#include "cuda_utils.h"
#include "logging.h"
#include "common.hpp"
#include "utils.h"
#include "calibrator.h"
#define USE_FP16 // set USE_INT8 or USE_FP16 or USE_FP32
#define DEVICE 0 // GPU id
#define NMS_THRESH 0.4
#define CONF_THRESH 0.5
#define BATCH_SIZE 1
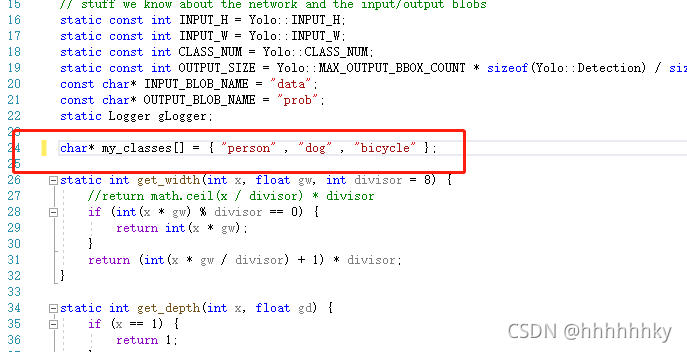
// stuff we know about the network and the input/output blobs
static const int INPUT_H = Yolo::INPUT_H;
static const int INPUT_W = Yolo::INPUT_W;
static const int CLASS_NUM = Yolo::CLASS_NUM;
static const int OUTPUT_SIZE = Yolo::MAX_OUTPUT_BBOX_COUNT * sizeof(Yolo::Detection) / sizeof(float) + 1; // we assume the yololayer outputs no more than MAX_OUTPUT_BBOX_COUNT boxes that conf >= 0.1
const char* INPUT_BLOB_NAME = "data";
const char* OUTPUT_BLOB_NAME = "prob";
static Logger gLogger;
char* my_classes[] = { "person" , "dog" , "bicycle" };
static int get_width(int x, float gw, int divisor = 8) {
//return math.ceil(x / divisor) * divisor
if (int(x * gw) % divisor == 0) {
return int(x * gw);
}
return (int(x * gw / divisor) + 1) * divisor;
}
static int get_depth(int x, float gd) {
if (x == 1) {
return 1;
}
else {
return round(x * gd) > 1 ? round(x * gd) : 1;
}
}
ICudaEngine* build_engine(unsigned int maxBatchSize, IBuilder* builder, IBuilderConfig* config, DataType dt, float& gd, float& gw, std::string& wts_name) {
INetworkDefinition* network = builder->createNetworkV2(0U);
// Create input tensor of shape {3, INPUT_H, INPUT_W} with name INPUT_BLOB_NAME
ITensor* data = network->addInput(INPUT_BLOB_NAME, dt, Dims3{ 3, INPUT_H, INPUT_W });
assert(data);
std::map weightMap = loadWeights(wts_name);
/* ------ yolov5 backbone------ */
auto focus0 = focus(network, weightMap, *data, 3, get_width(64, gw), 3, "model.0");
auto conv1 = convBlock(network, weightMap, *focus0->getOutput(0), get_width(128, gw), 3, 2, 1, "model.1");
auto bottleneck_CSP2 = C3(network, weightMap, *conv1->getOutput(0), get_width(128, gw), get_width(128, gw), get_depth(3, gd), true, 1, 0.5, "model.2");
auto conv3 = convBlock(network, weightMap, *bottleneck_CSP2->getOutput(0), get_width(256, gw), 3, 2, 1, "model.3");
auto bottleneck_csp4 = C3(network, weightMap, *conv3->getOutput(0), get_width(256, gw), get_width(256, gw), get_depth(9, gd), true, 1, 0.5, "model.4");
auto conv5 = convBlock(network, weightMap, *bottleneck_csp4->getOutput(0), get_width(512, gw), 3, 2, 1, "model.5");
auto bottleneck_csp6 = C3(network, weightMap, *conv5->getOutput(0), get_width(512, gw), get_width(512, gw), get_depth(9, gd), true, 1, 0.5, "model.6");
auto conv7 = convBlock(network, weightMap, *bottleneck_csp6->getOutput(0), get_width(1024, gw), 3, 2, 1, "model.7");
auto spp8 = SPP(network, weightMap, *conv7->getOutput(0), get_width(1024, gw), get_width(1024, gw), 5, 9, 13, "model.8");
/* ------ yolov5 head ------ */
auto bottleneck_csp9 = C3(network, weightMap, *spp8->getOutput(0), get_width(1024, gw), get_width(1024, gw), get_depth(3, gd), false, 1, 0.5, "model.9");
auto conv10 = convBlock(network, weightMap, *bottleneck_csp9->getOutput(0), get_width(512, gw), 1, 1, 1, "model.10");
auto upsample11 = network->addResize(*conv10->getOutput(0));
assert(upsample11);
upsample11->setResizeMode(ResizeMode::kNEAREST);
upsample11->setOutputDimensions(bottleneck_csp6->getOutput(0)->getDimensions());
ITensor* inputTensors12[] = { upsample11->getOutput(0), bottleneck_csp6->getOutput(0) };
auto cat12 = network->addConcatenation(inputTensors12, 2);
auto bottleneck_csp13 = C3(network, weightMap, *cat12->getOutput(0), get_width(1024, gw), get_width(512, gw), get_depth(3, gd), false, 1, 0.5, "model.13");
auto conv14 = convBlock(network, weightMap, *bottleneck_csp13->getOutput(0), get_width(256, gw), 1, 1, 1, "model.14");
auto upsample15 = network->addResize(*conv14->getOutput(0));
assert(upsample15);
upsample15->setResizeMode(ResizeMode::kNEAREST);
upsample15->setOutputDimensions(bottleneck_csp4->getOutput(0)->getDimensions());
ITensor* inputTensors16[] = { upsample15->getOutput(0), bottleneck_csp4->getOutput(0) };
auto cat16 = network->addConcatenation(inputTensors16, 2);
auto bottleneck_csp17 = C3(network, weightMap, *cat16->getOutput(0), get_width(512, gw), get_width(256, gw), get_depth(3, gd), false, 1, 0.5, "model.17");
// yolo layer 0
IConvolutionLayer* det0 = network->addConvolutionNd(*bottleneck_csp17->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.24.m.0.weight"], weightMap["model.24.m.0.bias"]);
auto conv18 = convBlock(network, weightMap, *bottleneck_csp17->getOutput(0), get_width(256, gw), 3, 2, 1, "model.18");
ITensor* inputTensors19[] = { conv18->getOutput(0), conv14->getOutput(0) };
auto cat19 = network->addConcatenation(inputTensors19, 2);
auto bottleneck_csp20 = C3(network, weightMap, *cat19->getOutput(0), get_width(512, gw), get_width(512, gw), get_depth(3, gd), false, 1, 0.5, "model.20");
//yolo layer 1
IConvolutionLayer* det1 = network->addConvolutionNd(*bottleneck_csp20->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.24.m.1.weight"], weightMap["model.24.m.1.bias"]);
auto conv21 = convBlock(network, weightMap, *bottleneck_csp20->getOutput(0), get_width(512, gw), 3, 2, 1, "model.21");
ITensor* inputTensors22[] = { conv21->getOutput(0), conv10->getOutput(0) };
auto cat22 = network->addConcatenation(inputTensors22, 2);
auto bottleneck_csp23 = C3(network, weightMap, *cat22->getOutput(0), get_width(1024, gw), get_width(1024, gw), get_depth(3, gd), false, 1, 0.5, "model.23");
IConvolutionLayer* det2 = network->addConvolutionNd(*bottleneck_csp23->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.24.m.2.weight"], weightMap["model.24.m.2.bias"]);
auto yolo = addYoLoLayer(network, weightMap, "model.24", std::vector{det0, det1, det2});
yolo->getOutput(0)->setName(OUTPUT_BLOB_NAME);
network->markOutput(*yolo->getOutput(0));
// Build engine
builder->setMaxBatchSize(maxBatchSize);
config->setMaxWorkspaceSize(16 * (1 << 20)); // 16MB
#if defined(USE_FP16)
config->setFlag(BuilderFlag::kFP16);
#elif defined(USE_INT8)
std::cout << "Your platform support int8: " << (builder->platformHasFastInt8() ? "true" : "false") << std::endl;
assert(builder->platformHasFastInt8());
config->setFlag(BuilderFlag::kINT8);
Int8EntropyCalibrator2* calibrator = new Int8EntropyCalibrator2(1, INPUT_W, INPUT_H, "./coco_calib/", "int8calib.table", INPUT_BLOB_NAME);
config->setInt8Calibrator(calibrator);
#endif
std::cout << "Building engine, please wait for a while..." << std::endl;
ICudaEngine* engine = builder->buildEngineWithConfig(*network, *config);
std::cout << "Build engine successfully!" << std::endl;
// Don't need the network any more
network->destroy();
// Release host memory
for (auto& mem : weightMap)
{
free((void*)(mem.second.values));
}
return engine;
}
ICudaEngine* build_engine_p6(unsigned int maxBatchSize, IBuilder* builder, IBuilderConfig* config, DataType dt, float& gd, float& gw, std::string& wts_name) {
INetworkDefinition* network = builder->createNetworkV2(0U);
// Create input tensor of shape {3, INPUT_H, INPUT_W} with name INPUT_BLOB_NAME
ITensor* data = network->addInput(INPUT_BLOB_NAME, dt, Dims3{ 3, INPUT_H, INPUT_W });
assert(data);
std::map weightMap = loadWeights(wts_name);
/* ------ yolov5 backbone------ */
auto focus0 = focus(network, weightMap, *data, 3, get_width(64, gw), 3, "model.0");
auto conv1 = convBlock(network, weightMap, *focus0->getOutput(0), get_width(128, gw), 3, 2, 1, "model.1");
auto c3_2 = C3(network, weightMap, *conv1->getOutput(0), get_width(128, gw), get_width(128, gw), get_depth(3, gd), true, 1, 0.5, "model.2");
auto conv3 = convBlock(network, weightMap, *c3_2->getOutput(0), get_width(256, gw), 3, 2, 1, "model.3");
auto c3_4 = C3(network, weightMap, *conv3->getOutput(0), get_width(256, gw), get_width(256, gw), get_depth(9, gd), true, 1, 0.5, "model.4");
auto conv5 = convBlock(network, weightMap, *c3_4->getOutput(0), get_width(512, gw), 3, 2, 1, "model.5");
auto c3_6 = C3(network, weightMap, *conv5->getOutput(0), get_width(512, gw), get_width(512, gw), get_depth(9, gd), true, 1, 0.5, "model.6");
auto conv7 = convBlock(network, weightMap, *c3_6->getOutput(0), get_width(768, gw), 3, 2, 1, "model.7");
auto c3_8 = C3(network, weightMap, *conv7->getOutput(0), get_width(768, gw), get_width(768, gw), get_depth(3, gd), true, 1, 0.5, "model.8");
auto conv9 = convBlock(network, weightMap, *c3_8->getOutput(0), get_width(1024, gw), 3, 2, 1, "model.9");
auto spp10 = SPP(network, weightMap, *conv9->getOutput(0), get_width(1024, gw), get_width(1024, gw), 3, 5, 7, "model.10");
auto c3_11 = C3(network, weightMap, *spp10->getOutput(0), get_width(1024, gw), get_width(1024, gw), get_depth(3, gd), false, 1, 0.5, "model.11");
/* ------ yolov5 head ------ */
auto conv12 = convBlock(network, weightMap, *c3_11->getOutput(0), get_width(768, gw), 1, 1, 1, "model.12");
auto upsample13 = network->addResize(*conv12->getOutput(0));
assert(upsample13);
upsample13->setResizeMode(ResizeMode::kNEAREST);
upsample13->setOutputDimensions(c3_8->getOutput(0)->getDimensions());
ITensor* inputTensors14[] = { upsample13->getOutput(0), c3_8->getOutput(0) };
auto cat14 = network->addConcatenation(inputTensors14, 2);
auto c3_15 = C3(network, weightMap, *cat14->getOutput(0), get_width(1536, gw), get_width(768, gw), get_depth(3, gd), false, 1, 0.5, "model.15");
auto conv16 = convBlock(network, weightMap, *c3_15->getOutput(0), get_width(512, gw), 1, 1, 1, "model.16");
auto upsample17 = network->addResize(*conv16->getOutput(0));
assert(upsample17);
upsample17->setResizeMode(ResizeMode::kNEAREST);
upsample17->setOutputDimensions(c3_6->getOutput(0)->getDimensions());
ITensor* inputTensors18[] = { upsample17->getOutput(0), c3_6->getOutput(0) };
auto cat18 = network->addConcatenation(inputTensors18, 2);
auto c3_19 = C3(network, weightMap, *cat18->getOutput(0), get_width(1024, gw), get_width(512, gw), get_depth(3, gd), false, 1, 0.5, "model.19");
auto conv20 = convBlock(network, weightMap, *c3_19->getOutput(0), get_width(256, gw), 1, 1, 1, "model.20");
auto upsample21 = network->addResize(*conv20->getOutput(0));
assert(upsample21);
upsample21->setResizeMode(ResizeMode::kNEAREST);
upsample21->setOutputDimensions(c3_4->getOutput(0)->getDimensions());
ITensor* inputTensors21[] = { upsample21->getOutput(0), c3_4->getOutput(0) };
auto cat22 = network->addConcatenation(inputTensors21, 2);
auto c3_23 = C3(network, weightMap, *cat22->getOutput(0), get_width(512, gw), get_width(256, gw), get_depth(3, gd), false, 1, 0.5, "model.23");
auto conv24 = convBlock(network, weightMap, *c3_23->getOutput(0), get_width(256, gw), 3, 2, 1, "model.24");
ITensor* inputTensors25[] = { conv24->getOutput(0), conv20->getOutput(0) };
auto cat25 = network->addConcatenation(inputTensors25, 2);
auto c3_26 = C3(network, weightMap, *cat25->getOutput(0), get_width(1024, gw), get_width(512, gw), get_depth(3, gd), false, 1, 0.5, "model.26");
auto conv27 = convBlock(network, weightMap, *c3_26->getOutput(0), get_width(512, gw), 3, 2, 1, "model.27");
ITensor* inputTensors28[] = { conv27->getOutput(0), conv16->getOutput(0) };
auto cat28 = network->addConcatenation(inputTensors28, 2);
auto c3_29 = C3(network, weightMap, *cat28->getOutput(0), get_width(1536, gw), get_width(768, gw), get_depth(3, gd), false, 1, 0.5, "model.29");
auto conv30 = convBlock(network, weightMap, *c3_29->getOutput(0), get_width(768, gw), 3, 2, 1, "model.30");
ITensor* inputTensors31[] = { conv30->getOutput(0), conv12->getOutput(0) };
auto cat31 = network->addConcatenation(inputTensors31, 2);
auto c3_32 = C3(network, weightMap, *cat31->getOutput(0), get_width(2048, gw), get_width(1024, gw), get_depth(3, gd), false, 1, 0.5, "model.32");
/* ------ detect ------ */
IConvolutionLayer* det0 = network->addConvolutionNd(*c3_23->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.33.m.0.weight"], weightMap["model.33.m.0.bias"]);
IConvolutionLayer* det1 = network->addConvolutionNd(*c3_26->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.33.m.1.weight"], weightMap["model.33.m.1.bias"]);
IConvolutionLayer* det2 = network->addConvolutionNd(*c3_29->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.33.m.2.weight"], weightMap["model.33.m.2.bias"]);
IConvolutionLayer* det3 = network->addConvolutionNd(*c3_32->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.33.m.3.weight"], weightMap["model.33.m.3.bias"]);
auto yolo = addYoLoLayer(network, weightMap, "model.33", std::vector{det0, det1, det2, det3});
yolo->getOutput(0)->setName(OUTPUT_BLOB_NAME);
network->markOutput(*yolo->getOutput(0));
// Build engine
builder->setMaxBatchSize(maxBatchSize);
config->setMaxWorkspaceSize(16 * (1 << 20)); // 16MB
#if defined(USE_FP16)
config->setFlag(BuilderFlag::kFP16);
#elif defined(USE_INT8)
std::cout << "Your platform support int8: " << (builder->platformHasFastInt8() ? "true" : "false") << std::endl;
assert(builder->platformHasFastInt8());
config->setFlag(BuilderFlag::kINT8);
Int8EntropyCalibrator2* calibrator = new Int8EntropyCalibrator2(1, INPUT_W, INPUT_H, "./coco_calib/", "int8calib.table", INPUT_BLOB_NAME);
config->setInt8Calibrator(calibrator);
#endif
std::cout << "Building engine, please wait for a while..." << std::endl;
ICudaEngine* engine = builder->buildEngineWithConfig(*network, *config);
std::cout << "Build engine successfully!" << std::endl;
// Don't need the network any more
network->destroy();
// Release host memory
for (auto& mem : weightMap)
{
free((void*)(mem.second.values));
}
return engine;
}
void APIToModel(unsigned int maxBatchSize, IHostMemory** modelStream, float& gd, float& gw, std::string& wts_name) {
// Create builder
IBuilder* builder = createInferBuilder(gLogger);
IBuilderConfig* config = builder->createBuilderConfig();
// Create model to populate the network, then set the outputs and create an engine
ICudaEngine* engine = build_engine(maxBatchSize, builder, config, DataType::kFLOAT, gd, gw, wts_name);
assert(engine != nullptr);
// Serialize the engine
(*modelStream) = engine->serialize();
// Close everything down
engine->destroy();
builder->destroy();
config->destroy();
}
void doInference(IExecutionContext& context, cudaStream_t& stream, void** buffers, float* input, float* output, int batchSize) {
// DMA input batch data to device, infer on the batch asynchronously, and DMA output back to host
CUDA_CHECK(cudaMemcpyAsync(buffers[0], input, batchSize * 3 * INPUT_H * INPUT_W * sizeof(float), cudaMemcpyHostToDevice, stream));
context.enqueue(batchSize, buffers, stream, nullptr);
CUDA_CHECK(cudaMemcpyAsync(output, buffers[1], batchSize * OUTPUT_SIZE * sizeof(float), cudaMemcpyDeviceToHost, stream));
cudaStreamSynchronize(stream);
}
bool parse_args(int argc, char** argv, std::string& engine) {
if (argc < 3) return false;
if (std::string(argv[1]) == "-v" && argc == 3) {
engine = std::string(argv[2]);
}
else {
return false;
}
return true;
}
int main(int argc, char** argv) {
cudaSetDevice(DEVICE);
//std::string wts_name = "";
std::string engine_name = "";
//float gd = 0.0f, gw = 0.0f;
//std::string img_dir;
if (!parse_args(argc, argv, engine_name)) {
std::cerr << "arguments not right!" << std::endl;
std::cerr << "./yolov5 -v [.engine] // run inference with camera" << std::endl;
return -1;
}
std::ifstream file(engine_name, std::ios::binary);
if (!file.good()) {
std::cerr << " read " << engine_name << " error! " << std::endl;
return -1;
}
char* trtModelStream{ nullptr };
size_t size = 0;
file.seekg(0, file.end);
size = file.tellg();
file.seekg(0, file.beg);
trtModelStream = new char[size];
assert(trtModelStream);
file.read(trtModelStream, size);
file.close();
// prepare input data ---------------------------
static float data[BATCH_SIZE * 3 * INPUT_H * INPUT_W];
//for (int i = 0; i < 3 * INPUT_H * INPUT_W; i++)
// data[i] = 1.0;
static float prob[BATCH_SIZE * OUTPUT_SIZE];
IRuntime* runtime = createInferRuntime(gLogger);
assert(runtime != nullptr);
ICudaEngine* engine = runtime->deserializeCudaEngine(trtModelStream, size);
assert(engine != nullptr);
IExecutionContext* context = engine->createExecutionContext();
assert(context != nullptr);
delete[] trtModelStream;
assert(engine->getNbBindings() == 2);
void* buffers[2];
// In order to bind the buffers, we need to know the names of the input and output tensors.
// Note that indices are guaranteed to be less than IEngine::getNbBindings()
const int inputIndex = engine->getBindingIndex(INPUT_BLOB_NAME);
const int outputIndex = engine->getBindingIndex(OUTPUT_BLOB_NAME);
assert(inputIndex == 0);
assert(outputIndex == 1);
// Create GPU buffers on device
CUDA_CHECK(cudaMalloc(&buffers[inputIndex], BATCH_SIZE * 3 * INPUT_H * INPUT_W * sizeof(float)));
CUDA_CHECK(cudaMalloc(&buffers[outputIndex], BATCH_SIZE * OUTPUT_SIZE * sizeof(float)));
// Create stream
cudaStream_t stream;
CUDA_CHECK(cudaStreamCreate(&stream));
cv::VideoCapture capture(1);
//cv::VideoCapture capture("../overpass.mp4");
//int fourcc = cv::VideoWriter::fourcc('M','J','P','G');
//capture.set(cv::CAP_PROP_FOURCC, fourcc);
if (!capture.isOpened()) {
std::cout << "Error opening video stream or file" << std::endl;
return -1;
}
int key;
int fcount = 0;
while (1)
{
cv::Mat frame;
capture >> frame;
if (frame.empty())
{
std::cout << "Fail to read image from camera!" << std::endl;
break;
}
fcount++;
//if (fcount < BATCH_SIZE && f + 1 != (int)file_names.size()) continue;
for (int b = 0; b < fcount; b++) {
//cv::Mat img = cv::imread(img_dir + "/" + file_names[f - fcount + 1 + b]);
cv::Mat img = frame;
if (img.empty()) continue;
cv::Mat pr_img = preprocess_img(img, INPUT_W, INPUT_H); // letterbox BGR to RGB
int i = 0;
for (int row = 0; row < INPUT_H; ++row) {
uchar* uc_pixel = pr_img.data + row * pr_img.step;
for (int col = 0; col < INPUT_W; ++col) {
data[b * 3 * INPUT_H * INPUT_W + i] = (float)uc_pixel[2] / 255.0;
data[b * 3 * INPUT_H * INPUT_W + i + INPUT_H * INPUT_W] = (float)uc_pixel[1] / 255.0;
data[b * 3 * INPUT_H * INPUT_W + i + 2 * INPUT_H * INPUT_W] = (float)uc_pixel[0] / 255.0;
uc_pixel += 3;
++i;
}
}
}
// Run inference
auto start = std::chrono::system_clock::now();
doInference(*context, stream, buffers, data, prob, BATCH_SIZE);
auto end = std::chrono::system_clock::now();
//std::cout << std::chrono::duration_cast(end - start).count() << "ms" << std::endl;
int fps = 1000.0 / std::chrono::duration_cast(end - start).count();
std::vector> batch_res(fcount);
for (int b = 0; b < fcount; b++) {
auto& res = batch_res[b];
nms(res, &prob[b * OUTPUT_SIZE], CONF_THRESH, NMS_THRESH);
}
for (int b = 0; b < fcount; b++) {
auto& res = batch_res[b];
//std::cout << res.size() << std::endl;
//cv::Mat img = cv::imread(img_dir + "/" + file_names[f - fcount + 1 + b]);
for (size_t j = 0; j < res.size(); j++) {
cv::Rect r = get_rect(frame, res[j].bbox);
cv::rectangle(frame, r, cv::Scalar(0x27, 0xC1, 0x36), 2);
std::string label = my_classes[(int)res[j].class_id];
cv::putText(frame, label, cv::Point(r.x, r.y - 1), cv::FONT_HERSHEY_PLAIN, 1.2, cv::Scalar(0xFF, 0xFF, 0xFF), 2);
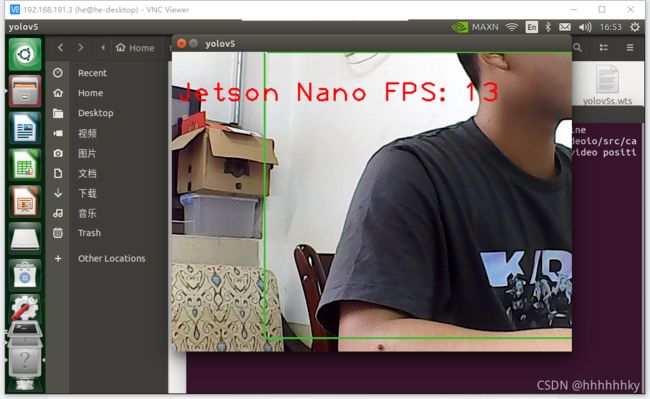
std::string jetson_fps = "Jetson Nano FPS: " + std::to_string(fps);
cv::putText(frame, jetson_fps, cv::Point(11, 80), cv::FONT_HERSHEY_PLAIN, 3, cv::Scalar(0, 0, 255), 2, cv::LINE_AA);
}
//cv::imwrite("_" + file_names[f - fcount + 1 + b], img);
}
cv::imshow("yolov5", frame);
key = cv::waitKey(1);
if (key == 'q') {
break;
}
fcount = 0;
}
capture.release();
// Release stream and buffers
cudaStreamDestroy(stream);
CUDA_CHECK(cudaFree(buffers[inputIndex]));
CUDA_CHECK(cudaFree(buffers[outputIndex]));
// Destroy the engine
context->destroy();
engine->destroy();
runtime->destroy();
return 0;
}
把原来的yolov5.cpp里面的内容删除掉,把这个直接贴进去
主要修改的地方有两点:
①标签类别
②摄像头编号,我的是1,之前源代码是0,我调用的时候是绿屏

3.再次编译,进行测试
cd build
make
sudo ./yolov5 -v yolov5s.engine
4.结果
下面开始deepstream检测(以下过程都是在jetson nano上进行)!!!
一、安装deepstream
1.先安装需要的软件包
sudo apt install \
libssl1.0.0 \
libgstreamer1.0-0 \
gstreamer1.0-tools \
gstreamer1.0-plugins-good \
gstreamer1.0-plugins-bad \
gstreamer1.0-plugins-ugly \
gstreamer1.0-libav \
libgstrtspserver-1.0-0 \
libjansson4=2.11-1
2.下载DeepStream SDK deepstream_sdk_v5.1.0_jetson.tbz2
注意:deepstream5.1是和tensorrt7版本相对于的,我的是tensorrt7.1.3
输入以下命令以提取并安装DeepStream SDK:
sudo tar -jxvf deepstream_sdk_v5.1.0_jetson.tbz2 -C /
cd /opt/nvidia/deepstream/deepstream-5.1/
sudo ./install.sh
sudo ldconfig
3.测试deepstream安装情况
deepstream-app --version-all
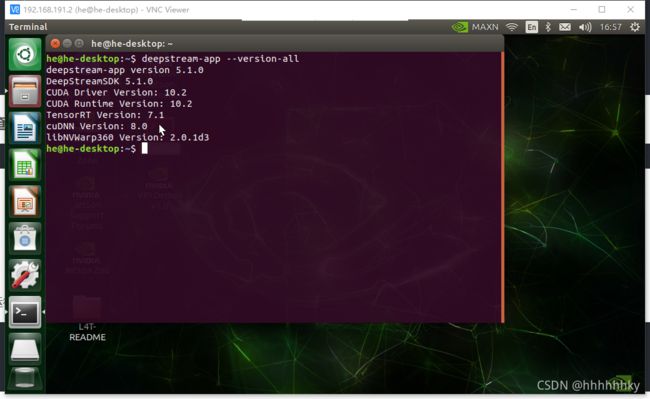
安装成功
4.输入命令测试一下文件夹自带的视频
cd /opt/nvidia/deepstream/deepstream-5.1/samples/configs/deepstream-app/
deepstream-app -c source8_1080p_dec_infer-resnet_tracker_tiled_display_fp16_nano.txt 成功显示
二、将yolov5s.engine部署到deepstream上
1.下载代码
git clone https://github.com/DanaHan/Yolov5-in-Deepstream-5.0.git 2.进入进入Yolov5-in-Deepstream-5.0/Deepstream 5.0/nvdsinfer_custom_impl_Yolo/目录下,修改nvdsparsebbox_Yolo.cpp文件中的类型数量
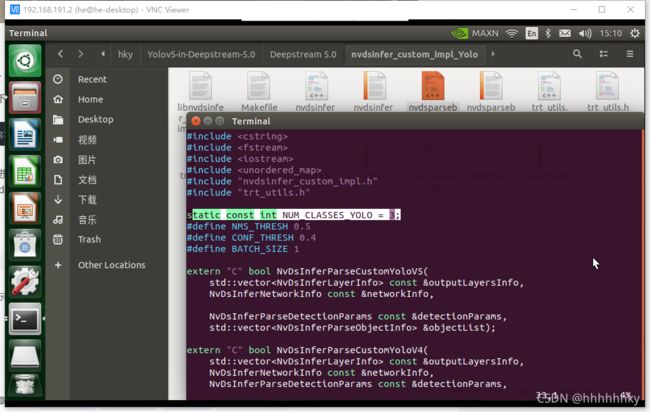 保存之后在nvdsinfer_custom_impl_Yolo目录下进行make编译
保存之后在nvdsinfer_custom_impl_Yolo目录下进行make编译


编译成功
3.将我之前tensorrtx生成的yolov5s.engine文件和libmyplugins.so放到Yolov5-in-Deepstream-5.0/Deepstream 5.0
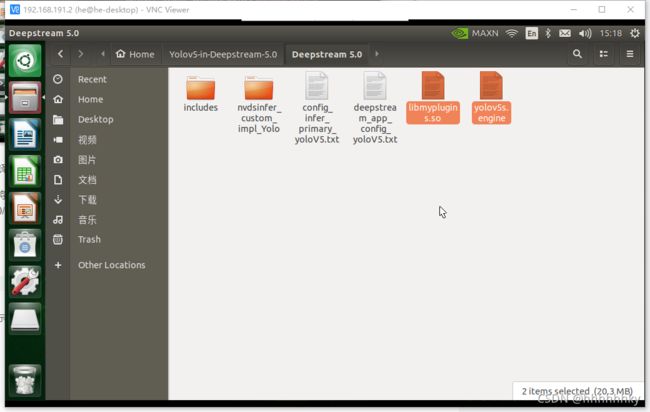
4.在 Yolov5-in-Deepstream-5.0/Deepstream 5.0文件夹下创建文本labels.txt,里面写入自己识别的种类名

5.修改deepstream_app_config_yoloV5.txt (改三个地方)

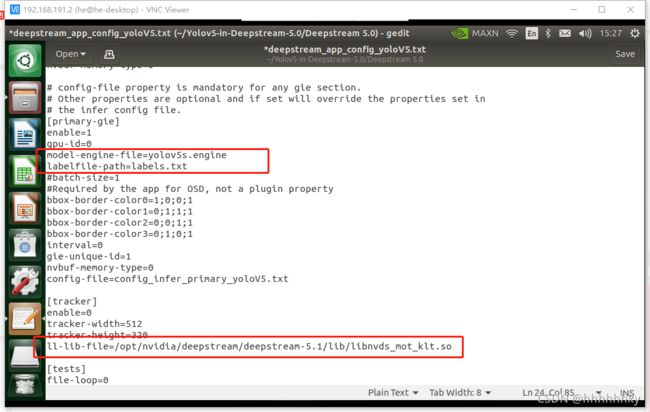
source0:这一块是检测mp4视频的路径,这里修改的地方是将deepstream-5.0改为deepstream-5.1,因为我的deepstream的版本的5.1
primary-gie这一块的填写权重和识别种类名字的路径,按自己名字修改,我这是原始的名字
tracker:将5.0改为5.1
5.修改config_infer_primary_yoloV5.txt文件
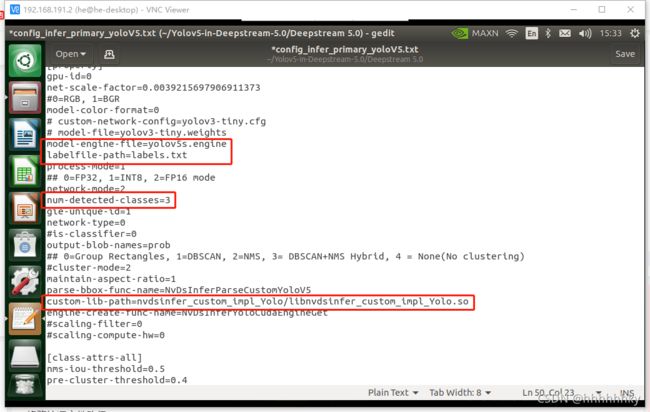
修改权重路径
labels文件路径的配置
修改识别类型数量,原本为80
修改编译文件路径
6.测试mp4视频
在Yolov5-in-Deepstream-5.0/Deepstream 5.0目录下运行
LD_PRELOAD=./libmyplugins.so deepstream-app -c deepstream_app_config_yoloV5.txt
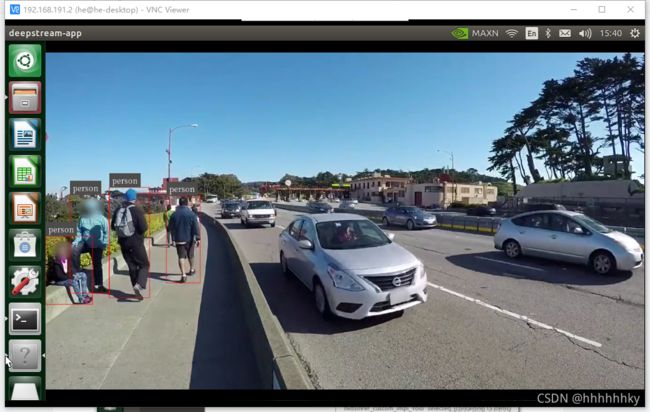
输入1080P的视频帧率大概是13-14左右
7.使用CSI摄像头测试
修改deepstream_app_config_yoloV5.txt

当enable=0时意思是这一项关闭,大概就是这个意思,1为开启
在Yolov5-in-Deepstream-5.0/Deepstream 5.0目录下运行
LD_PRELOAD=./libmyplugins.so deepstream-app -c deepstream_app_config_yoloV5.txt

帧率13-14
以上就是yolov5s.pt经过tensorrt转换,并部署到deepstream使用csi检测的过程
我没有进行deepstream的USB摄像头检测,因为我没有部署成功
参考博文:
Jetson nano上部署自己的Yolov5模型(TensorRT加速)_ailaier的专栏-CSDN博客_jetson yolov5
Jetson nano从烧录系统到DeepStream+TensorRT+yolov5检测CSI摄像头视频 - 哔哩哔哩