返回 >>>>>> PCL-3D点云总目录
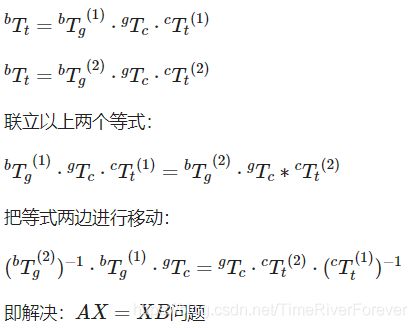
一、手眼标定的原理
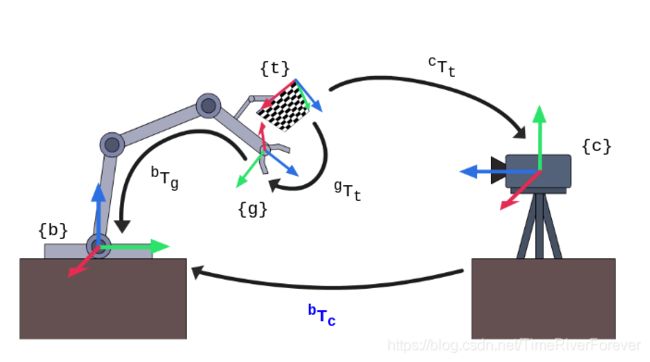
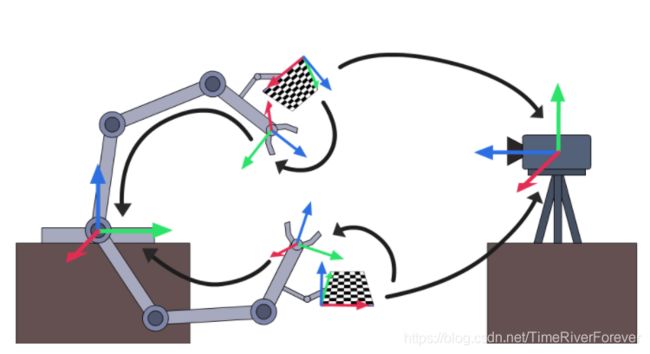
图例说明:
- {b}:base基座标系
- {g}:gripper抓手坐标系
- {t}:target标定板坐标系
- {c}:camera相机坐标系
正交矩阵的特性:
眼在手上
eye in hand,眼在手上,相机移动

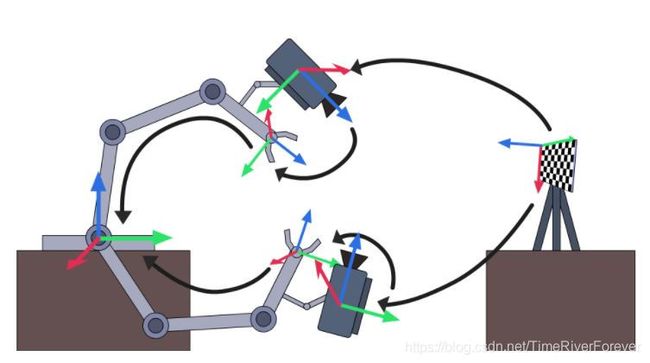
眼在手外
eye to hand,眼在手外,相机固定

二、手眼标定的操作
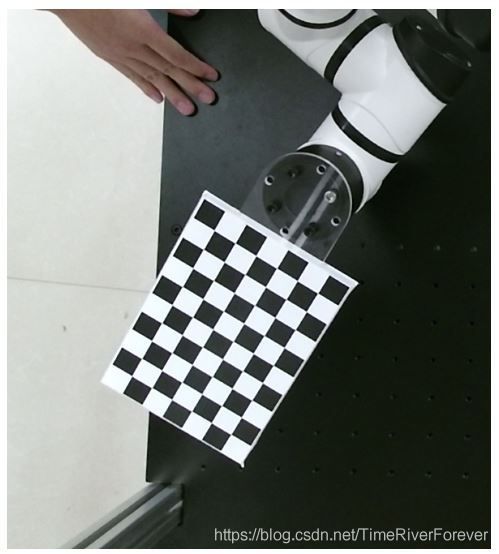
- 将标定板固定在机械臂末端
- 开启机械臂,开启摄像头
- 在距离摄像头40、60、80cm的距离上,在摄像头可见范围内,使用各种角度各拍照15-20张照片,一共45-60张。
- 同时保存照片以及对应拍照时机械臂位姿
- 准备好之前标定的相机内参
- 执行手眼标定API,得到相机在基坐标系的表达(旋转矩阵R+平移向量t)
三、自己动手实现手眼标定及验证
// Created by poplar on 19-7-25.
#include
#include
#include
#include "boost/filesystem.hpp" // includes all needed Boost.Filesystem declarations
#include
#include
#include "tinyxml/tinyxml2.h"
#include
注:以上文字和图片均来源于链接,若有侵权请联系转载方删除。
返回 >>>>>> PCL-3D点云总目录