手眼标定学习总结:原理、Tsai方法和Matlab代码
本文仅用于记录自己学习手眼标定过程的一些总结。
目录
- 手眼标定基本原理
- 求解AX=XB
- Tsai方法
- Tsai的Matlab代码实现
- 后记
- 参考文献
手眼标定基本原理
符号统一:
T x y T_x^y Txy或T_y_x表示将一个点从x系的坐标转移到y系的坐标,后面一律用T_y_x形式,方便编辑。
T_c_t:从target(棋盘格)坐标系到camera坐标系,从图像计算得到
T_g_c:从camera到gripper(机械臂末端坐标系),这是手眼标定需要求的参数
T_b_g:从gripper到base(机械臂基底坐标系),从机械臂运动学方程得到
T_b_t:从target到base,一般是未知无法计算的
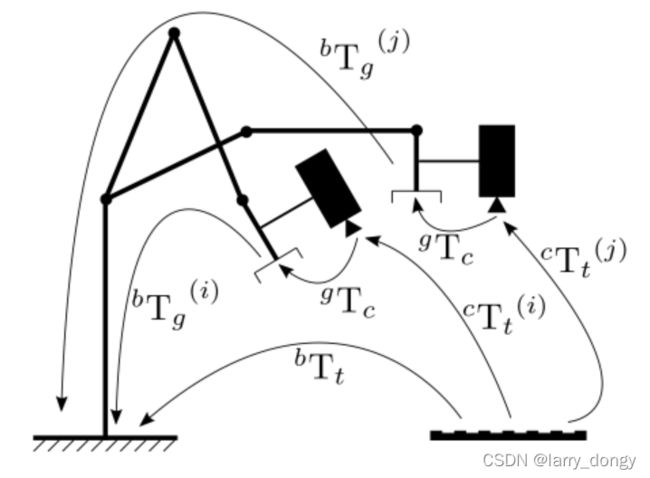 计算时,由于T_b_t未知,所以无法直接求出T_g_c。但如果考虑增量(见下图),图中Hgij为G_ij,即gripper从第 i 个位置到 j 个位置,Hcij为C_ij,相机位置的增量(此图来自于参考文献[1],H表示的是Homogeneous Transformation Matrix。且图中的Hcg为从camera到gripper,对应本文中的T_g_c)。红色和黄色最终表示同一个变换,所以此时有等式: G i j ∗ T g c = T g c ∗ C i j G_{ij} * T_g^c=T_g^c*C_{ij} Gij∗Tgc=Tgc∗Cij
计算时,由于T_b_t未知,所以无法直接求出T_g_c。但如果考虑增量(见下图),图中Hgij为G_ij,即gripper从第 i 个位置到 j 个位置,Hcij为C_ij,相机位置的增量(此图来自于参考文献[1],H表示的是Homogeneous Transformation Matrix。且图中的Hcg为从camera到gripper,对应本文中的T_g_c)。红色和黄色最终表示同一个变换,所以此时有等式: G i j ∗ T g c = T g c ∗ C i j G_{ij} * T_g^c=T_g^c*C_{ij} Gij∗Tgc=Tgc∗Cij

最终camera和gripper达到多个位置后,得到多组 ij 对应关系,得到终极表达式: A X = X B AX=XB AX=XB
需要注意的是,X的含义与给的A和B有关。本文中,X为:T_g_c,A/B分别为G和C组成的 4 ∗ ( 4 ∗ N ) 4*(4*N) 4∗(4∗N)二维矩阵,即每4列为一个ij对应: G i = G ( 1 : 4 , i ∗ 4 − 3 : i ∗ 4 ) G_i = G(1:4, i*4-3:i*4) Gi=G(1:4,i∗4−3:i∗4)(matlab写法)。
求解AX=XB
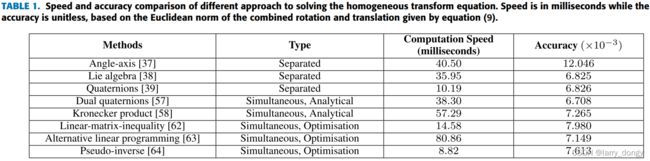
下面就是求解AX=XB这个方程。根据综述文[2],求解主要有:seperated、simultaneous两种思路。
seperated方法
前者是首先计算出旋转量R,然后再计算t。将等式写成:
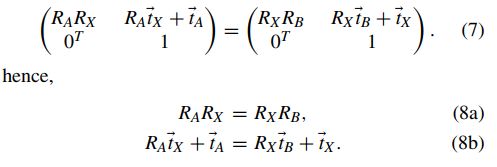
求解出Rx再计算tx。计算Rx时,又由于采用的旋转表示方式不同,又分为轴角、李代数、四元数等不同的解法。
simultaneous方法
seperated方法的问题是,R计算的误差,会传递给t。且理论上R和t是耦合的,分开计算不合理。所以有同时计算两个参数的方法,或解析的、或优化的求解 m i n ∣ ∣ A X − X B ∣ ∣ min ||AX-XB|| min∣∣AX−XB∣∣。
详细内容请参考[2]综述。
Tsai方法
Tsai方法是seperated的轴角表示方法,详见论文[1]。这里不做推导,只给出计算方法:
- 计算出Gij和Cij
- Gij和Cij对应的轴角表示方法,记作Pgij, Pcij
- 根据公式: ( s k e w ( P g i j + P c i j ) ∗ P c g ′ = P c i j − P g i j ) (skew(Pgij+Pcij)*Pcg' = Pcij-Pgij) (skew(Pgij+Pcij)∗Pcg′=Pcij−Pgij)计算出 P c g ′ Pcg' Pcg′
- 由 P c g ′ Pcg' Pcg′计算出R_g_c
- 由 ( ( R g i j − I ) ∗ t c g = R c g ∗ t c i j − t g i j ((R_{gij}-I)*t_c^g=R_{cg}*t_{cij}-t_{gij} ((Rgij−I)∗tcg=Rcg∗tcij−tgij计算出平移量t_g_c
- 最终得到T_g_c = [R_g_c, t_g_c; 0,0,0, 1]
Tsai的Matlab代码实现
忘了从哪里找了一个代码(想起来补出处),对着论文公式,确定认了方法有效。并进行了验证。
完整代码的github链接:https://github.com/LarryDong/HandEye-Tsai
function X = tsai(A,B)
% Calculates the least squares solution of
% AX = XB
%
% A New Technique for Fully Autonomous and Efficient 3D Robotics Hand/Eye Calibration. Lenz Tsai
% Mili Shah July 2014
% checked, modified and commented by LarryDong 2021.12.28
%
% Input: A/B: (4,4N) matrix (homogeneous transformation matrix, (R, t | 0, 1) )
% Output: X: (4,4), AX = XB
%
% For hand-eye calibration,
% X: T_g_c, transform a point from camera to gripper
% A(4, i*4-3:i*4): homogeneous transformation from gripper_i to gripper_j
% B(4, i*4-3:i*4): homogeneous transformation from camera_i to camera_j
% The equation `AX=XB` is based on rigid body transformation assumption.
[m,n] = size(A); n = n/4;
S = zeros(3*n,3);
v = zeros(3*n,1);
%% Calculate best rotation R
for i = 1:n
A1 = logm(A(1:3,4*i-3:4*i-1)); % 计算旋转对应的反对称矩阵:exp(\phi^)=Aij,其中\phi^是旋转轴\phi的反对称矩阵,即下面的a
B1 = logm(B(1:3,4*i-3:4*i-1)); % calculate the skew matrix of a rotation: exp(\phi^)=Aij, where \phi& is the skew matrix of aixs-rotation \phi (is `a` in next lines)
a = [A1(3,2) A1(1,3) A1(2,1)]'; a = a/norm(a); % 计算旋转向量增量 a_ij
b = [B1(3,2) B1(1,3) B1(2,1)]'; b = b/norm(b); % calculate the rotation vector (axis) increasement a_ij
S(3*i-2:3*i,:) = skew(a+b); % 对应论文的公式(12)中的Skew(Pgij+Pcij) Eq.12 in reference paper, Skew(Pgij+Pcij)
v(3*i-2:3*i,:) = a-b; % 对应论文的公式(12)中的Pcij-Pgij Eq.12 in reference paper, Pcij-Pgij
end
x = S\v; % x is Pcg' in Eq.12
theta = 2*atan(norm(x));
eps = 0.0000000001; % avoid divide-by-zero. Added by LarryDong
x = x/(norm(x)+eps);
R = (eye(3)*cos(theta) + sin(theta)*skew(x) + (1-cos(theta))*x*x')'; % Rodrigues. (Eq.10)
%% Calculate best translation t
% This paper first calculate R then t, in a seperate procedure. Eq. 15
C = zeros(3*n,3);
d = zeros(3*n,1);
I = eye(3);
for i = 1:n
C(3*i-2:3*i,:) = I - A(1:3,4*i-3:4*i-1); % C is (Rgij-I) in Eq. 15 (Negative on both side)
d(3*i-2:3*i,:) = A(1:3,4*i)-R*B(1:3,4*i); % d is (RcgTcij - Tgij) in Eq. 15
end
t = C\d;
X = [R t;0 0 0 1];
end
%% other functions.
function Sk = skew( x )
Sk = [0,-x(3),x(2);x(3),0,-x(1);-x(2),x(1),0];
end
验证思路如下:随机给定(或通过image计算出)一些列的T_c_t,然后假设T_g_c是某个数值,计算出理论的T_b_g。然后再用T_b_g和T_c_t通过手眼标定计算T_g_c看是否与给定的相同。这可以避免T_b_g采集时和T_c_t计算错误的情况。
验证代码如下:
clc;clear;
%% load data
fid = fopen('target2cam.csv', 'r');
A = textscan(fid, '%f,%f,%f,%f,%f,%f,%f');
rvecx = A{2};
rvecy = A{3};
rvecz = A{4};
tvecx = A{5};
tvecy = A{6};
tvecz = A{7};
%% set data
% T_b_t can be any value. No effection on results
R_b_t = [1, 0, 0;
0, 1, 0;
0, 0, 1];
t_b_t = [0, 0, 0]';
T_b_t = [R_b_t, t_b_t;
0,0,0, 1];
% give "T_c_g" (or T_g_c) to generate the T_b_g
theta_x = pi/5;
theta_y = pi/6;
theta_z = pi/9;
rotX = [1, 0, 0;
0, cos(theta_x), sin(theta_x);
0, -sin(theta_x), cos(theta_x)];
rotY = [cos(theta_y), 0, -sin(theta_y);
0, 1, 0;
sin(theta_y), 0, cos(theta_y)];
rotZ = [cos(theta_z), sin(theta_z), 0;
-sin(theta_z), cos(theta_z), 0;
0, 0, 1];
R_c_g = rotZ * rotY * rotX;
t_c_g = [1, 2, 3]';
T_c_g = [R_c_g, t_c_g;
0,0,0, 1];
T_g_c = inv(T_c_g);
%% generate grigper2base
N = 16;
T_b_g_list = zeros(4, 4, N);
T_t_c_list = zeros(4, 4, N);
for i = 1:N
% fprintf("%d\n", i);
r_c_t = [rvecx(i), rvecy(i), rvecz(i)]';
t_c_t = [tvecx(i), tvecy(i), tvecz(i)]';
R_c_t = Rodrigues(r_c_t); % matlab貌似没有这个函数,需要自己实现
T_c_t = [R_c_t, t_c_t;
0,0,0, 1];
T_t_c = inv(T_c_t);
T_b_g = T_b_t * T_t_c * T_c_g; % generate T_b_g based on chain mul.
T_t_c_list(:,:,i) = T_t_c;
T_b_g_list(:,:,i) = T_b_g;
end
%% calculate Gij and Cij
Gij_list = [];
Cij_list = [];
i_idx = [1,2,3,4,5,6];
j_idx = [7,10,11,12,13,14];
for k = 1:length(i_idx)
i = i_idx(k);
j = j_idx(k);
Gij = inv(T_b_g_list(:,:,i)) * T_b_g_list(:,:,j);
Cij = inv(T_t_c_list(:,:,i)) * T_t_c_list(:,:,j);
Gij_list = [Gij_list, Gij];
Cij_list = [Cij_list, Cij];
end
X = tsai(Gij_list, Cij_list);
% X is T_g_c when given GX = XC
X
T_g_c
Error = norm(X - T_g_c)
运行结果:计算值和理论值相相同:

后记
最开始用python写,手眼标定的结果总是不正确。无奈之下,采用“验证”中的方法,给定了T_g_c真值,生成模拟的数据,然后再验证。但使用OpenCV的CalibrateHandEye函数,计算结果始终不正确,逻辑也查过了没有问题,故换成了Matlab,认真学习了手眼标定的原理,看了几篇论文,复现了Tsai方法,最终验证了正确。也不知道是不是python代码写的有问题,还是OpenCV的库有问题(OpenCV v4.5)。
参考文献
[1] R. Y. Tsai and R. K. Lenz, “A new technique for fully autonomous and efficient 3D robotics hand/eye calibration,” in IEEE Transactions on Robotics and Automation, vol. 5, no. 3, pp. 345-358, June 1989, doi: 10.1109/70.34770.
[2] I. Enebuse, M. Foo, B. S. K. K. Ibrahim, H. Ahmed, F. Supmak and O. S. Eyobu, “A Comparative Review of Hand-Eye Calibration Techniques for Vision Guided Robots,” in IEEE Access, vol. 9, pp. 113143-113155, 2021, doi: 10.1109/ACCESS.2021.3104514.