【cs229-Lecture17】离散与维数灾难
主要内容:
- 解决MDP问题的算法:
- 离散化;
- 模型MDP的同化型; (model/similator)
- 拟合值迭代算法;
- Q函数;
- 近似政策迭代;
笔记转自:http://blog.csdn.net/dark_scope/article/details/8252969
连续状态的MDP
之前我们的状态都是离散的,如果状态是连续的,下面将用一个例子来予以说明,这个例子就是inverted pendulum问题
也就是一个铁轨小车上有一个长杆,要用计算机来让它保持平衡(其实就是我们平时玩杆子,放在手上让它一直保持竖直状态)
这个问题需要的状态有:都是real的值
x(在铁轨上的位置)
theta(杆的角度)
x’(铁轨上的速度)
thata'(角速度)
离散化
也就是把连续的值分成多个区间,这是很自然的一个想法,比如一个二维的连续区间可以分成如下的离散值:
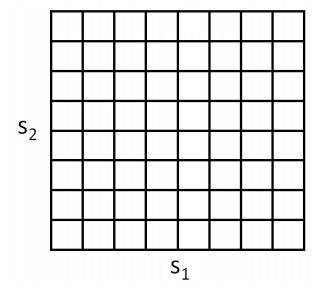
但是这样做的效果并不好,因为用一个离散的去表示连续空间毕竟是有限的离散值。
离散值不好的另一个原因是因为curse of dimension(维度诅咒),因为连续值离散值后会有多个离散值,这样如果维度很大就会造成有非常多状态
从而使需要更多计算,这是随着dimension以指数增长的
simulator方法
也就是说假设我们有一个simulator,输入一个状态s和一个操作a可以输出下一个状态,并且下一个状态是服从MDP中的概率Psa的分布,即:
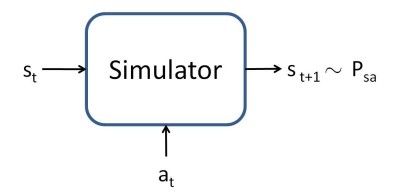
这样我们就把状态变成连续的了,但是如何得到这样一个simulator呢?
①:根据客观事实
比如说上面的inverted pendulum问题,action就是作用在小车上的水平力,根据物理上的知识,完全可以解出这个加速度对状态的影响
也就是算出该力对于小车的水平加速度和杆的角加速度,再去一个比较小的时间间隔,就可以得到S(t+1)了
②:学习一个simulator
这个部分,首先你可以自己尝试控制小车,得到一系列的数据,假设力是线性的或者非线性的,将S(t+1)看作关于S(t)和a(t)的一个函数
得到这些数据之后,你可以通过一个supervised learning来得到这个函数,其实就是得到了simulator了。
比如我们假设这是一个线性的函数:

在inverted pendulum问题中,A就是一个4*4的矩阵,B就是一个4维向量,再加上一点噪音,就变成了:其中噪音服从![]()
![]()
我们的任务就是要学习到A和B
(这里只是假设线性的,更具体的,如果我们假设是非线性的,比如说加一个feature是速度和角速度的乘积,或者平方,或者其他,上式还可以写作:)
![]()
这样就是非线性的了,我们的任务就是得到A和B,用一个supervised learning分别拟合每个参数就可以了
连续状态中得Value(Q)函数
这里介绍了一个fitted value(Q) iteration的算法
在之前我们的value iteration算法中,我们有:

这里使用了期望的定义而转化。fitted value(Q) iteration算法的主要思想就是用一个参数去逼近右边的这个式子
也就是说:令
![]()
其中![]() 是一些基于s的参数,我们需要去得到系数
是一些基于s的参数,我们需要去得到系数![]() 的值,先给出算法步骤再一步步解释吧:
的值,先给出算法步骤再一步步解释吧:
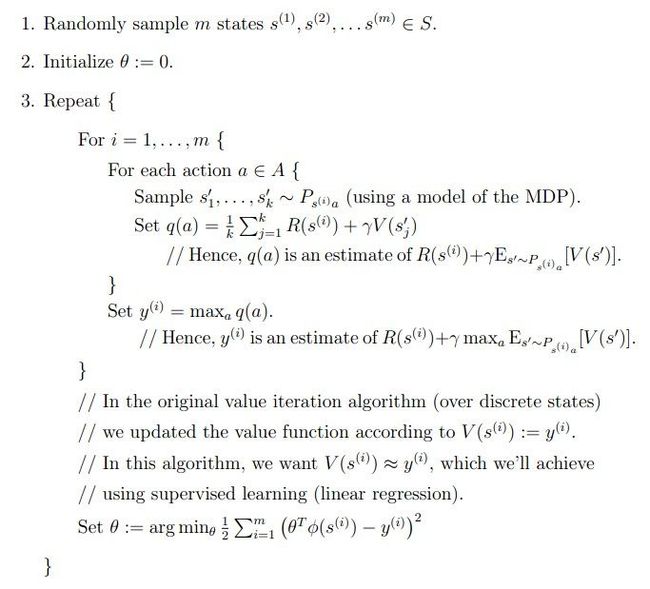
算法步骤其实很简单,最主要的其实就是他的思想:
在对于action的那个循环里,我们尝试得到这个action所对应的![]() ,记作q(a)
,记作q(a)
这里的q(a)都是对应第i个样例的情况
然后i=1……m的那个循环是得到是最优的action对应的Value值,记作y(i),然后用y(i)拿去做supervised learning,大概就是这样一个思路
至于reward函数就比较简单了,比如说在inverted pendulum问题中,杆子比较直立就是给高reward,这个可以很直观地从状态得到衡量奖励的方法
在有了之上的东西之后,我们就可以去算我们的policy了:
确定性的模型
上面讲的连续状态的算法其实是针对一个非确定性的模型,即一个动作可能到达多个状态,有P在影响到达哪个状态
如果在一个确定性模型中,其实是一个简化的问题,得到的样例简化了,计算也简化了
也就是说一个对于一个状态和一个动作,只能到达另一个状态,而不是多个。