- 高级 Java 并发:模式和最佳实践
小蜗牛慢慢爬行
java开发语言
并发性是现代软件开发的基石,它使应用程序能够同时执行多个任务并高效利用系统资源。Java是一种多功能且功能强大的编程语言,它已经发展到包含强大的并发支持,使开发人员能够创建高性能、可扩展的应用程序。本文深入介绍了Java中的高级并发模式和最佳实践,使开发人员能够掌握应对复杂并发挑战和优化其应用程序的知识。1.Java并发基础知识基本并发概念Java中的并发性首先要了解基本构建块:线程和Runnab
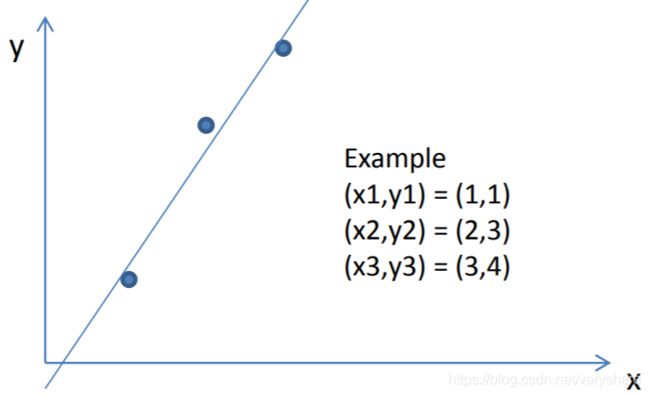
- 线性插值
aisi8242
感觉我正在日益沦为一个搬运工...线性插值是指这样一个问题:给定整数\(n,m\),以及一个\(n\)次多项式\(f\)在\(0,1,2,\dots,n-1\)处的点值,即\(f(0),f(1),f(2),\dots,f(n-1)\),希望能在关于\(n\)的线性时间内求出\(f(m)\)。\(n\leq10^6,m\leq10^{18}\)。利用多项式多点插值并求一次点值可以做到\(O(n\lo
- 掌握 Spring Boot 中的 WebClient:何时以及为何使用它而不是 RestTemplate
小蜗牛慢慢爬行
springboot后端java开发语言spring
在开发SpringBoot应用程序时,与RESTfulWeb服务进行通信是一项常见需求。从历史上看,开发人员已将RestTemplate用于此目的。然而,随着反应式编程的出现和对更高效资源利用的需求,WebClient已成为首选。本文探讨了RestTemplate和WebClient之间的差异,并通过实际示例强调了为什么WebClient更适合现代应用程序。何时使用RestTemplate?Res
- Linux(Centos 7.6)命令详解:file
豆是浪个
linuxcentos运维
1.命令作用查看文件类型(DeterminetypeofFILEs)其他说明:Windows系统是通过文件扩展名来定义文件类型;Linux可通过file命令分析文件头部信息中的标识信息来显示文件类型,通过file一系列测试来确认文件是文本文件、目录、链接、二进制、压缩文件等。2.命令语法Usage:file[OPTION...][FILE...]Usage:file[选项...][文件...]3.
- Linux(Centos 7.6)目录结构详解
豆是浪个
linuxcentos运维
Linux(Centos7.6)是一个操作系统,其核心设计理念是将一切资源抽象为文件,即一切皆文件。比如系统中的硬件设备硬盘、网络接口等都被视为文件。Windows系统一般是分为C、D、E盘。而Linux(Centos7.6)是以斜线"/"作为文件系统的开始目录,我们一般叫"根目录",然后以根目录为起始点成树状图进行分布。1.Linux(Centos7.6)目录结构查看1.1.使用ls/ll命令查
- 小白也能懂的Vite + React组件开发完全指南
前端
学习前端开发,你可能会听说过很多工具和框架,其中Vite和React无疑是炙手可热的明星。Vite凭借其闪电般的速度和优秀的开发体验,迅速成为了许多开发者的首选构建工具;而React,作为目前最流行的JavaScript库之一,以其组件化、声明式编程的特性,简化了复杂的Web应用开发。这篇教程将带你快速掌握AI写代码工具Vite和React组件开发的核心技能,让你从小白也能轻松入门,独立完成简单的
- Python_线性插值
胡小记
python
1、语法解释线性插值主要用到的是numpy中的interp函数interp(x,xp,fp,left=None,right=None,period=None)其中x为要插值点的横坐标,xp为x的坐标值(必须是递增),fp为y的坐标值left是可选择参数,如果x小于xp,则会默认返回xp[0]对应的fp值,right同理。period可设定横坐标的周期,该选项打开时,则忽略left和right。具体
- 如何用selenium来链接并打开比特浏览器进行自动化操作(1)
写python的鑫哥
爬虫实战进阶seleniumpyppeteerpuppeteer比特浏览器比特指纹浏览器链接打开
前言本文是该专栏的第76篇,后面会持续分享python爬虫干货知识,记得关注。本文,笔者将基于“比特浏览器”,通过selenium来实现链接并打开比特浏览器,进行相关的“自动化”操作。值得一提的是,在本专栏之前,笔者有详细介绍过“使用selenium或者pyppeteer(puppeteer)来链接并打开指纹浏览器AdsPower”的方法和详细教程。笔者将相关文章的链接,整理如下(对此领域,感兴趣
- Linux 安装 MySQL 8 数据库(图文详细教程)
格姗知识圈
LinuxMySQLlinuxmysqlcentos
本教程手把手教你如何在Linux安装MySQL数据库,以CentOS7为例。1.下载并安装MySQL官方的YumRepositorywget-i-chttps://repo.mysql.com//mysql80-community-release-el7-1.noarch.rpm使用上面的命令就直接下载了安装用的YumRepository,大概25KB的样子,然后就可以直接yum安装了。yum-y
- 多查询分析中的并发处理实践
FADxafs
python
在进行查询分析时,某些技术可能会生成多个查询。在这种情况下,我们需要记得执行所有查询并合并结果。本文将通过一个简单的示例(使用模拟数据)展示如何实现这一点。技术背景介绍在数据分析和信息检索领域,查询分析技术能够帮助我们生成和优化查询以提高搜索效率。然而,当同时生成多个查询时,处理这些查询并有效地合并结果就显得尤为重要。本次我们将使用langchain库来演示如何处理多查询情况。核心原理解析通过生成
- 为AI聊天工具添加一个知识系统 之40 总纲领和整体设计 之2 三种簿册(账簿/电话簿/户口簿)
一水鉴天
人工语言软件智能智能制造人工智能
本文要点前面给出的是项目式开发的项目“口号”,有点像包治百病的“万金油”。但在原型(原型式开发的一个原型口号)上分别有三个口号--注意:它们的表达和项目口号完全不同。逻辑上:所有模型model都是错的,但某些模型是有用的。数学上:所有程序prcedure严格来讲都是不精确的,但是有些程序非常接近用户的预期;语言上:所有表达expression都是含糊的,但任何语言都具有巨大的表达力。现在剩下的就是
- Elixir语言的软件工程
十二日后
包罗万象golang开发语言后端
Elixir语言的软件工程引言在当今的软件工程领域,选择编程语言和技术栈是一个至关重要的决策。随着分布式系统、实时应用和高并发场景的需求日益增加,Elixir语言应运而生。Elixir是一种基于Erlang虚拟机(BEAM)的编程语言,兼具了Erlang的并发特性和灵活性,同时增加了现代编程语言的一些优雅和简洁的特性。本文将深入探讨Elixir语言在软件工程中的应用,包括其核心特性、生态系统、最佳
- Ruby语言的循环实现
2501_90183952
包罗万象golang开发语言后端
Ruby语言的循环实现深入探讨在程序设计中,循环是一种常见的控制结构,用于重复执行某些代码块。不同的编程语言提供了不同类型的循环结构,以满足不同的需求。Ruby是一种灵活且易于使用的编程语言,其循环实现方式独具一格,本文将深入探讨Ruby语言的循环结构,包括while循环、until循环、for循环、以及使用each方法的迭代器,帮助读者更好地理解循环在Ruby中的应用。一、循环的基本概念在开始讨
- 软件工程的熵减:AI代码生成器如何降低系统复杂度
前端
软件开发的世界,如同一个不断膨胀的宇宙。随着项目规模的增长,代码库日益庞大,系统复杂度也随之水涨船高。维护、扩展和协作的难度成倍增加,这如同物理学中的熵增原理一样,系统朝着混乱无序的方向发展。为了对抗这种“熵增”,我们需要寻找有效的手段,而AI代码生成器的出现,为我们提供了一种强大的武器。在传统的软件开发模式下,开发者花费大量时间处理重复性工作,例如编写大量的样板代码,这不仅效率低下,而且容易引入
- 路径规划:环境适应性路径规划_(7).路径规划的不确定性处理
zhubeibei168
机器人(二)机器人计算机视觉机器人导航人工智能数码相机
路径规划的不确定性处理在路径规划中,不确定性是一个常见的问题,尤其是在动态和复杂的环境中。不确定性可以来源于多种因素,包括传感器误差、环境变化、动态障碍物等。处理不确定性是确保路径规划算法在实际应用中能够稳定、可靠运行的关键。本节将详细探讨路径规划中的不确定性处理方法,包括概率模型、鲁棒优化、重规划策略等。1.不确定性的来源在路径规划中,不确定性主要来源于以下几个方面:1.1传感器误差传感器是路径
- day_03_查找算法、排序算法
幻影maple
数据结构与算法查找算法排序算法
六算法的概念和评价1基本概念2评定标准3描述方式七常用的查找算法1线性查找算法顺序查找算法1算法流程2算法评价2二分查找算法折半查找算法1算法流程2算法评价八常用的排序算法1冒泡排序算法1算法流程2算法评价2插入排序算法1算法流程2算法评价3选择排序算法1算法流程2算法评价4快速排序算法1算法流程2算法评价六、算法的概念和评价1、基本概念算法就是指对解题方案准确而又完整的描述,是一系列解决问题的清
- 咱们继续学Java——高级篇 第一百九十八篇:之Java 2D中的区域与笔划知识详解
一杯年华@编程空间
咱们继续学java高级篇strutsspringbootjava-eejettyjunitlog4jservlet
咱们继续学Java——高级篇第一百九十八篇:之Java2D中的区域与笔划知识详解在Java的学习征程中,每一个知识点都是我们积累经验、提升能力的基石。我写这篇博客的目的,就是希望能与各位一同探索Java编程的奇妙世界,共同在这个领域中取得进步。今天,我们将聚焦于Java2D中的区域和笔划相关知识,深入了解这些概念和操作,相信这会让你在图形绘制方面有更多的技巧和方法。Path2D类的方法介绍java
- Java中的HTTP POST请求详解
华科℡云
pythonhttp
HTTPPOST请求是HTTP协议中的另一种请求方法,通常用于向指定的资源提交数据,以创建或更新资源。与GET请求不同,POST请求会将请求数据包含在请求体中,而不是通过URL参数传递。这使得POST请求特别适合处理大量数据或敏感信息。在Java中,我们可以使用多种方式发送HTTPPOST请求,其中最常用的方法之一是使用java.net.HttpURLConnection类。此外,还有一些流行的第
- PyTorch 基础数据集:从理论到实践的深度学习基石
那年一路北
Pytorch理论+实践深度学习pytorch人工智能
一、引言深度学习作为当今人工智能领域的核心技术,在图像识别、自然语言处理、语音识别等众多领域取得了令人瞩目的成果。而在深度学习的体系中,数据扮演着举足轻重的角色,它是模型训练的基础,如同建筑的基石,决定了模型的性能和泛化能力。PyTorch作为当下最流行的深度学习框架之一,为开发者提供了丰富且强大的工具来处理数据集。本文将深入探讨PyTorch中的基础数据集,从深度学习中数据的重要性出发,详细介绍
- mysql的timestamp类型_MySQL数据库中的timestamp类型与时区
weixin_39758696
MySQL的timestamp类型时间范围between'1970-01-0100:00:01'and'2038-01-1903:14:07',超出这个范围则值记录为'0000-00-0000:00:00',该类型的一个重要特点就是保存的时间与时区密切相关,上述所说的时间范围是UTC(UniversalTimeCoordinated)标准,指的是经度0度上的标准时间,我国日常生活中时区以首都北京所
- 批量作业调度、数据挖掘,这几款应该是今年 “最值得推荐” 的ETL工具了
加菲盐008
taskctlKettlekettleetl批量作业调度数据挖掘taskctl
工具传送门:Taskctl商业付费版(付费)TaskctlWeb商业免费版(永久免费)Kettle(开源免费)Datastage(付费)ETL是数据仓库中的非常重要的一环,是承前启后的必要的一步。ETL负责将分布的、异构数据源中的数据如关系数据、平面数据文件等抽取到临时中间层后进行清洗、转换、集成,最后加载到数据仓库或数据集市中,成为联机分析处理、数据挖掘的基础。下面给大家介绍一下什么是ETL以及
- BP神经网络概述及其预测的Python和MATLAB实现
追蜻蜓追累了
神经网络回归算法深度学习机器学习启发式算法lstmgru
##一、背景###1.1人工神经网络的起源人工神经网络(ArtificialNeuralNetwork,ANN)受生物神经网络的启发,模拟大脑神经元之间的连接和信息处理方式。尽管早在1943年就有学者如McCulloch和Pitts提出了数学模型,但人工神经网络真正被广泛研究是在20世纪80年代。###1.2BP神经网络的兴起反向传播(BackPropagation,简称BP)算法是20世纪80年
- React Hooks 基于 JS 闭包原理实现,但是闭包也会带来很多麻烦
头脑旋风
javascriptreact.js前端reactnative
文章开始之前希望大家支持一下我独立开发的微信小程序“头脑旋风”,或微信扫描我的头像进入,谢谢支持~文章目录1.JS中的闭包2.ReactHooks中的闭包3.过时的闭包4.修复过时闭包的问题5.Hook中过时的闭包总结1.JS中的闭包下面定义了一个工厂函数createIncrement(i),它返回一个increment函数。之后,每次调用increment函数时,内部计数器的值都会增加i。fun
- ReactNative
青岑lw
JS库react-native
接触ReactNative也已经一段时间了,把自己遇到的一些问题总结出来希望能帮助到正在踩坑的人。ListViewListView是RN中的使用频率非常高的组件,问题却也层出不穷,FlatList等列表组件类似。首先是row中的视图不能随着state或Mobx而实时更新,如果把样式绑定到state中使用this.setState()方法更改数据后会发现,更改数据后视图无法更改,只有新渲染的row才
- 机器视觉在医疗影像分析中的应用:助力放射科医生精准诊断
人工智能专属驿站
大数据人工智能计算机视觉
在现代医疗领域,影像学检查如X光、CT扫描和MRI等是诊断疾病的重要手段。随着技术的不断发展,机器视觉算法在医疗影像分析中的应用日益广泛,为放射科医生提供了强大的辅助工具,极大地提高了诊断的准确性和效率。本文将探讨机器视觉在医疗影像分析中的具体应用及其对医疗诊断带来的变革。一、机器视觉算法简介机器视觉是一种模拟人类视觉的科学技术,通过图像处理、模式识别和计算机视觉等技术,使计算机能够“看”懂图像中
- Python中的数字类型
不爱敲代码的小李0812
python二级通关宝典python开发语言后端
目录一、概述二、整数类型三、浮点数四、复数类型一、概述1)Python语言提供三种数字类型:整数类型,浮点数类型和复数类型,分别对应数学中的整数,实数和复数2)1010是整数类型,10.10是一个浮点数类型,10+10j是一个复数类型二、整数类型1)与数学中的整数概念一致,没有取值范围限制。2)整数类型有4种进制表示:十进制,二进制,八进制和十六进制。默认情况,整数采用十进制,其他进制需要增加引导
- 5.modelHandler处理model
uncleqiao
slf4jslf4jlogback
文章目录一、前言二、常用modelHandler解析modelconfiguration标签解析property标签解析conversionRule标签解析appender标签解析root标签解析logger标签解析三、总结一、前言前面的文章主要介绍了logback将logback.xml中的节点路径解析成一个个的model,最后在DefaultProcessor中使用modelHandler对m
- Class相关api介绍
uncleqiao
java基础java
文章目录版本约定api一览1.获取类信息的方法2.获取类成员(字段、方法、构造函数)的方法3.操作类成员的方法4.类型检查和类型转换的方法5.数组相关的方法6.注解相关的方法7.类加载和反射相关的辅助方法api测试isA的判断isSynthetic判断动态类获取泛型类型获取直接继承的泛型父类方法中的本地类构造器中的本地类内部类判断类名称匿名类判断判断本地类判断成员类获取成员类castasSubcl
- M302H-ZN-Hi3798MV300/MV300H-当贝纯净桌面-卡刷固件包
fatiaozhang9527
机顶盒刷机固件魔百盒刷机魔百盒固件移动魔百盒机顶盒ROM盒子ROM
M302H-ZN-Hi3798MV300/MV300H-当贝纯净桌面-卡刷固件包-内有教程特点:1、适用于对应型号的电视盒子刷机;2、开放原厂固件屏蔽的市场安装和u盘安装apk;3、修改dns,三网通用;4、大量精简内置的没用的软件,运行速度提升,多出大量的存储空间;5、去除应用安装限制;6、支持开机自启动、开机密码锁、儿童应用锁、应用隐藏、开机自动进入HDMI等各种花式功能;魔百和M302H-Z
- GarageBand:录制与编辑音频轨道教程_2024-07-17_16-51-15.Tex
chenjj4003
游戏开发2音视频自动化运维游戏unity
GarageBand:录制与编辑音频轨道教程GarageBand基础操作启动GarageBand并创建新项目打开GarageBand在Mac上,点击Dock栏中的GarageBand图标或通过Finder中的应用程序文件夹找到并启动GarageBand。在iOS设备上,从主屏幕找到GarageBand应用并点击打开。创建新项目选择“文件”>“新建”或点击屏幕左上角的“+”按钮。在弹出的窗口中,选择
- ViewController添加button按钮解析。(翻译)
张亚雄
c
<div class="it610-blog-content-contain" style="font-size: 14px"></div>// ViewController.m
// Reservation software
//
// Created by 张亚雄 on 15/6/2.
- mongoDB 简单的增删改查
开窍的石头
mongodb
在上一篇文章中我们已经讲了mongodb怎么安装和数据库/表的创建。在这里我们讲mongoDB的数据库操作
在mongo中对于不存在的表当你用db.表名 他会自动统计
下边用到的user是表明,db代表的是数据库
添加(insert):
- log4j配置
0624chenhong
log4j
1) 新建java项目
2) 导入jar包,项目右击,properties—java build path—libraries—Add External jar,加入log4j.jar包。
3) 新建一个类com.hand.Log4jTest
package com.hand;
import org.apache.log4j.Logger;
public class
- 多点触摸(图片缩放为例)
不懂事的小屁孩
多点触摸
多点触摸的事件跟单点是大同小异的,上个图片缩放的代码,供大家参考一下
import android.app.Activity;
import android.os.Bundle;
import android.view.MotionEvent;
import android.view.View;
import android.view.View.OnTouchListener
- 有关浏览器窗口宽度高度几个值的解析
换个号韩国红果果
JavaScripthtml
1 元素的 offsetWidth 包括border padding content 整体的宽度。
clientWidth 只包括内容区 padding 不包括border。
clientLeft = offsetWidth -clientWidth 即这个元素border的值
offsetLeft 若无已定位的包裹元素
- 数据库产品巡礼:IBM DB2概览
蓝儿唯美
db2
IBM DB2是一个支持了NoSQL功能的关系数据库管理系统,其包含了对XML,图像存储和Java脚本对象表示(JSON)的支持。DB2可被各种类型的企 业使用,它提供了一个数据平台,同时支持事务和分析操作,通过提供持续的数据流来保持事务工作流和分析操作的高效性。 DB2支持的操作系统
DB2可应用于以下三个主要的平台:
工作站,DB2可在Linus、Unix、Windo
- java笔记5
a-john
java
控制执行流程:
1,true和false
利用条件表达式的真或假来决定执行路径。例:(a==b)。它利用条件操作符“==”来判断a值是否等于b值,返回true或false。java不允许我们将一个数字作为布尔值使用,虽然这在C和C++里是允许的。如果想在布尔测试中使用一个非布尔值,那么首先必须用一个条件表达式将其转化成布尔值,例如if(a!=0)。
2,if-els
- Web开发常用手册汇总
aijuans
PHP
一门技术,如果没有好的参考手册指导,很难普及大众。这其实就是为什么很多技术,非常好,却得不到普遍运用的原因。
正如我们学习一门技术,过程大概是这个样子:
①我们日常工作中,遇到了问题,困难。寻找解决方案,即寻找新的技术;
②为什么要学习这门技术?这门技术是不是很好的解决了我们遇到的难题,困惑。这个问题,非常重要,我们不是为了学习技术而学习技术,而是为了更好的处理我们遇到的问题,才需要学习新的
- 今天帮助人解决的一个sql问题
asialee
sql
今天有个人问了一个问题,如下:
type AD value
A
- 意图对象传递数据
百合不是茶
android意图IntentBundle对象数据的传递
学习意图将数据传递给目标活动; 初学者需要好好研究的
1,将下面的代码添加到main.xml中
<?xml version="1.0" encoding="utf-8"?>
<LinearLayout xmlns:android="http:/
- oracle查询锁表解锁语句
bijian1013
oracleobjectsessionkill
一.查询锁定的表
如下语句,都可以查询锁定的表
语句一:
select a.sid,
a.serial#,
p.spid,
c.object_name,
b.session_id,
b.oracle_username,
b.os_user_name
from v$process p, v$s
- mac osx 10.10 下安装 mysql 5.6 二进制文件[tar.gz]
征客丶
mysqlosx
场景:在 mac osx 10.10 下安装 mysql 5.6 的二进制文件。
环境:mac osx 10.10、mysql 5.6 的二进制文件
步骤:[所有目录请从根“/”目录开始取,以免层级弄错导致找不到目录]
1、下载 mysql 5.6 的二进制文件,下载目录下面称之为 mysql5.6SourceDir;
下载地址:http://dev.mysql.com/downl
- 分布式系统与框架
bit1129
分布式
RPC框架 Dubbo
什么是Dubbo
Dubbo是一个分布式服务框架,致力于提供高性能和透明化的RPC远程服务调用方案,以及SOA服务治理方案。其核心部分包含: 远程通讯: 提供对多种基于长连接的NIO框架抽象封装,包括多种线程模型,序列化,以及“请求-响应”模式的信息交换方式。 集群容错: 提供基于接
- 那些令人蛋痛的专业术语
白糖_
springWebSSOIOC
spring
【控制反转(IOC)/依赖注入(DI)】:
由容器控制程序之间的关系,而非传统实现中,由程序代码直接操控。这也就是所谓“控制反转”的概念所在:控制权由应用代码中转到了外部容器,控制权的转移,是所谓反转。
简单的说:对象的创建又容器(比如spring容器)来执行,程序里不直接new对象。
Web
【单点登录(SSO)】:SSO的定义是在多个应用系统中,用户
- 《给大忙人看的java8》摘抄
braveCS
java8
函数式接口:只包含一个抽象方法的接口
lambda表达式:是一段可以传递的代码
你最好将一个lambda表达式想象成一个函数,而不是一个对象,并记住它可以被转换为一个函数式接口。
事实上,函数式接口的转换是你在Java中使用lambda表达式能做的唯一一件事。
方法引用:又是要传递给其他代码的操作已经有实现的方法了,这时可以使
- 编程之美-计算字符串的相似度
bylijinnan
java算法编程之美
public class StringDistance {
/**
* 编程之美 计算字符串的相似度
* 我们定义一套操作方法来把两个不相同的字符串变得相同,具体的操作方法为:
* 1.修改一个字符(如把“a”替换为“b”);
* 2.增加一个字符(如把“abdd”变为“aebdd”);
* 3.删除一个字符(如把“travelling”变为“trav
- 上传、下载压缩图片
chengxuyuancsdn
下载
/**
*
* @param uploadImage --本地路径(tomacat路径)
* @param serverDir --服务器路径
* @param imageType --文件或图片类型
* 此方法可以上传文件或图片.txt,.jpg,.gif等
*/
public void upload(String uploadImage,Str
- bellman-ford(贝尔曼-福特)算法
comsci
算法F#
Bellman-Ford算法(根据发明者 Richard Bellman 和 Lester Ford 命名)是求解单源最短路径问题的一种算法。单源点的最短路径问题是指:给定一个加权有向图G和源点s,对于图G中的任意一点v,求从s到v的最短路径。有时候这种算法也被称为 Moore-Bellman-Ford 算法,因为 Edward F. Moore zu 也为这个算法的发展做出了贡献。
与迪科
- oracle ASM中ASM_POWER_LIMIT参数
daizj
ASMoracleASM_POWER_LIMIT磁盘平衡
ASM_POWER_LIMIT
该初始化参数用于指定ASM例程平衡磁盘所用的最大权值,其数值范围为0~11,默认值为1。该初始化参数是动态参数,可以使用ALTER SESSION或ALTER SYSTEM命令进行修改。示例如下:
SQL>ALTER SESSION SET Asm_power_limit=2;
- 高级排序:快速排序
dieslrae
快速排序
public void quickSort(int[] array){
this.quickSort(array, 0, array.length - 1);
}
public void quickSort(int[] array,int left,int right){
if(right - left <= 0
- C语言学习六指针_何谓变量的地址 一个指针变量到底占几个字节
dcj3sjt126com
C语言
# include <stdio.h>
int main(void)
{
/*
1、一个变量的地址只用第一个字节表示
2、虽然他只使用了第一个字节表示,但是他本身指针变量类型就可以确定出他指向的指针变量占几个字节了
3、他都只存了第一个字节地址,为什么只需要存一个字节的地址,却占了4个字节,虽然只有一个字节,
但是这些字节比较多,所以编号就比较大,
- phpize使用方法
dcj3sjt126com
PHP
phpize是用来扩展php扩展模块的,通过phpize可以建立php的外挂模块,下面介绍一个它的使用方法,需要的朋友可以参考下
安装(fastcgi模式)的时候,常常有这样一句命令:
代码如下:
/usr/local/webserver/php/bin/phpize
一、phpize是干嘛的?
phpize是什么?
phpize是用来扩展php扩展模块的,通过phpi
- Java虚拟机学习 - 对象引用强度
shuizhaosi888
JAVA虚拟机
本文原文链接:http://blog.csdn.net/java2000_wl/article/details/8090276 转载请注明出处!
无论是通过计数算法判断对象的引用数量,还是通过根搜索算法判断对象引用链是否可达,判定对象是否存活都与“引用”相关。
引用主要分为 :强引用(Strong Reference)、软引用(Soft Reference)、弱引用(Wea
- .NET Framework 3.5 Service Pack 1(完整软件包)下载地址
happyqing
.net下载framework
Microsoft .NET Framework 3.5 Service Pack 1(完整软件包)
http://www.microsoft.com/zh-cn/download/details.aspx?id=25150
Microsoft .NET Framework 3.5 Service Pack 1 是一个累积更新,包含很多基于 .NET Framewo
- JAVA定时器的使用
jingjing0907
javatimer线程定时器
1、在应用开发中,经常需要一些周期性的操作,比如每5分钟执行某一操作等。
对于这样的操作最方便、高效的实现方式就是使用java.util.Timer工具类。
privatejava.util.Timer timer;
timer = newTimer(true);
timer.schedule(
newjava.util.TimerTask() { public void run()
- Webbench
流浪鱼
webbench
首页下载地址 http://home.tiscali.cz/~cz210552/webbench.html
Webbench是知名的网站压力测试工具,它是由Lionbridge公司(http://www.lionbridge.com)开发。
Webbench能测试处在相同硬件上,不同服务的性能以及不同硬件上同一个服务的运行状况。webbench的标准测试可以向我们展示服务器的两项内容:每秒钟相
- 第11章 动画效果(中)
onestopweb
动画
index.html
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/
- windows下制作bat启动脚本.
sanyecao2314
javacmd脚本bat
java -classpath C:\dwjj\commons-dbcp.jar;C:\dwjj\commons-pool.jar;C:\dwjj\log4j-1.2.16.jar;C:\dwjj\poi-3.9-20121203.jar;C:\dwjj\sqljdbc4.jar;C:\dwjj\voucherimp.jar com.citsamex.core.startup.MainStart
- Java进行RSA加解密的例子
tomcat_oracle
java
加密是保证数据安全的手段之一。加密是将纯文本数据转换为难以理解的密文;解密是将密文转换回纯文本。 数据的加解密属于密码学的范畴。通常,加密和解密都需要使用一些秘密信息,这些秘密信息叫做密钥,将纯文本转为密文或者转回的时候都要用到这些密钥。 对称加密指的是发送者和接收者共用同一个密钥的加解密方法。 非对称加密(又称公钥加密)指的是需要一个私有密钥一个公开密钥,两个不同的密钥的
- Android_ViewStub
阿尔萨斯
ViewStub
public final class ViewStub extends View
java.lang.Object
android.view.View
android.view.ViewStub
类摘要: ViewStub 是一个隐藏的,不占用内存空间的视图对象,它可以在运行时延迟加载布局资源文件。当 ViewSt