综述:生成自动驾驶的高精地图技术(3)
文章:High-Definition Map Generation Technologies for Autonomous Driving
作者:Zhibin Bao, Sabir Hossain, Haoxiang Lang, Xianke Lin
编译:点云PCL
来源:arXiv 2022
本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
本文回顾了最近利用二维和三维地图生成高精地图生成技术,介绍了高精地图的概念及其在自动驾驶中的作用,并对高精地图生成技术进行了详细概述,还将讨论当前高精地图生成技术的局限性,以推动未来的研究。
综述:生成自动驾驶的高精地图技术(1)
综述:生成自动驾驶的高精地图技术(2)
高精地图框架
随着高精地图的日益复杂和需要提取的环境特征数量的增加,有必要使用一定框架形式的软件以充分存储地图中的相关信息,并确保地图的一致性。这里介绍了三种用于创建高精地图的流行的开源框架,包括Lanelet2、OpenDRIVE和Apollo maps。
A
Lanelet2
Lanelet2是为Bertha Drive项目开发的Liblanelet(也称为Lanelet)的扩展和推广,Lanelet2地图采用Lanelet的现有格式,即基于XML(extensible markup language)的OSM(Open Street Map)数据格式,Open Street Map是一种免费的在线地图编辑工具,由全球地图编辑人员不断更新和贡献,然而,只要地图的实际数据格式可以转换为Lanelet2格式而不丢失任何信息,则认为地图的实际数据格式是不相关的和可互换的。
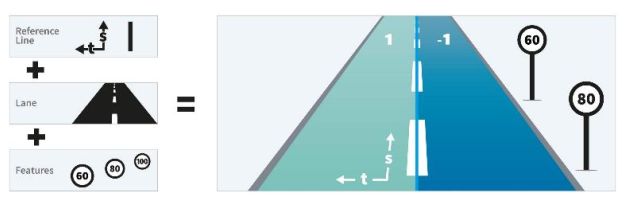
图16 ASAM OpenDRIVE HD地图结构
Lanelet2地图包含三个层:物理层、关系层和拓扑层,如图15所示,这三个层的特征与此处定义的特征相似。第一个物理层由两个元素组成,点和线,点是地图的基本元素,它可以将垂直结构(例如极点)表示为单点,将车道或区域表示为一组点,线串被构造为两个或多个点的有序阵列,其中每两个点之间使用线性插值,顾名思义,物理层定义了可检测的元素,如红绿灯、标线、路沿石等。
第二个关系层由三个元素组成,即车道、区域和交通监管要素元素,车道定义了不同的道路类型,如常规车道、人行横道和轨道,Lanelets还与车道内不变的交通规则相关联,它由恰好一个左行和一个右行字符串定义为两个方向相反的边界,通过将左边框更改为右边框,线串对中的方向可以互换,区域由一个或多个线绳构成,形成封闭的屏障,通常表示静态结构,如建筑物、停车场、操场和草地,顾名思义,交通监管要素定义了交通规则,以监管车辆自身,车道和区域可以有一个或多个交通监管要素,例如速度限制和限制,还可以添加动态规则,例如基于一天中的时间的转弯限制,作为交通监管元素,Lanelet2是一个支持高精地图的简单而强大的框架,它还经常与Autoware 和Auto一起用于为高精地图创建矢量地图,有关Lanelet2框架的更多详细信息,请参见文章中的参考文献。
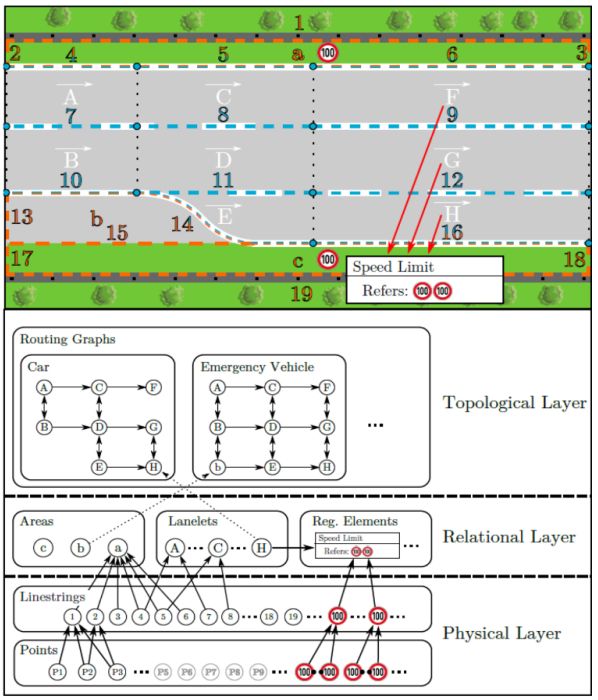
图15 Lanelet2地图结构:物理层定义了由点和线串形成的物理元素,例如杆状物体、标记和边界,关系层定义了区域、车道和交通监管元素,如建筑物、高速公路、行驶方向和交通规则,拓扑层定义了前两层元素之间的拓扑关系,图中的拓扑层显示了正常车辆和应急车辆的路由
B
OpenDRIVE
OpenDRIVE是一个开源框架,用于描述道路网络和创建高精地图,由自动化和测量系统标准化协会(ASAM)开发,它还使用XML文件格式存储地图信息,在ASAM OpenDRIVE地图中,有三个元素/层、参考线/道路、车道和特征,见图16。
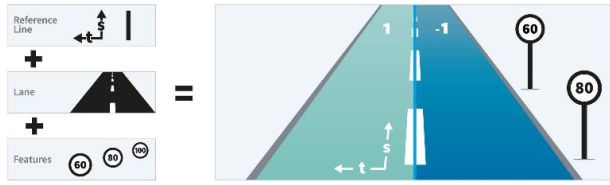
图16 ASAM OpenDRIVE HD地图结构
与使用点来描述和构造高精地图特征的Lanelet2地图不同,OpenDRIVE使用几何图元,包括直线、弧线、圆弧、三次多项式和多项式来描述道路形状和行驶方向,第一个元素为基准线,基准线是每个OpenDRIVE道路网络的关键组成部分,因为所有车道和特征都是沿着基准线构建的。第二个元素是车道线,附加到参考线,表示地图上的可行驶路径,每条道路至少包含一条宽度大于0的车道线,每条道路上的车道数取决于实际交通车道,没有限制,当沿着道路建造车道作为车道编号的参考时,需要宽度为0的中心车道,见图17。
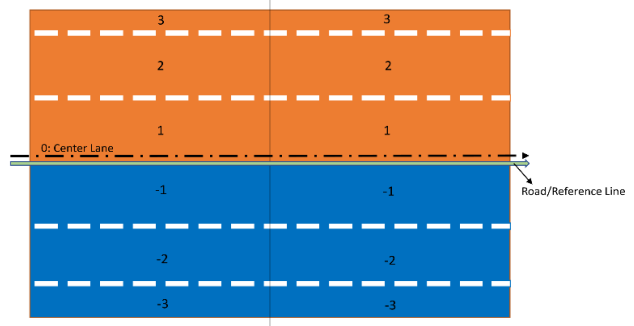
图17 具有不同行驶方向车道的中心车道
中心车道根据道路类型定义两侧的行驶方向,可以是相反方向,也可以是相同方向,在图17中,由于中心车道和基准线之间没有偏移,因此中心车道与基准线重合,最后一个元素Features包含与交通规则相关的对象,例如信号和标志,然而,与Lanelet2不同,动态内容不在ASAM OpenDRIVE的范围内。ASAM提供的有关OpenDRIVE的详细用户指南也可以在相关文件中找到。
C
Apollo地图
Apollo地图是由百度Apollo创建的高精地图,Apollo是中国领先的自动驾驶平台,Apollo高精地图也使用OpenDRIVE格式,但这是专门为Apollo设计的修改版本,与OpenDRIVE不同,Apollo只是使用点,使用诸如直线、弧线和圆弧之类的几何图元来定义道路,与Lanelet2中的点一样,每个点存储纬度和经度值,这些点的列表定义了道路边界,在Apollo高精地图中,通常有五个不同的元素:
1、道路元素包含道路边界、车道类型和车道行驶方向等特征;
2、相交元素具有相交边界;
3、交通信号要素包括交通信号灯和标志;
4、逻辑关系元素包含交通规则;
5、其他要素包括人行横道、路灯和建筑物。
为了构建高精地图,百度Apollo将生成过程分为五个步骤:数据源、数据处理、目标检测、手动验证和地图制作,如图18所示。
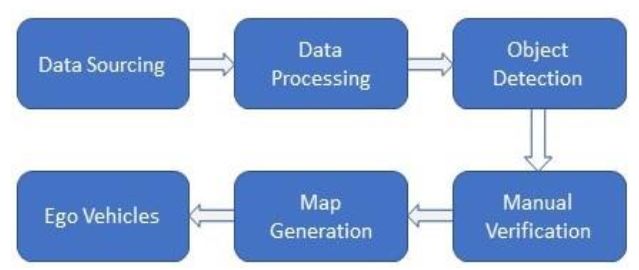
图18 百度apollo地图生成模块
在作者看来,apollo地图是OpenDRIVE的一个更高级、更复杂的版本,apollo地图包含最初不在OpenDRIVE中的元素,例如无停车区和人行横道,apollo地图也需要比OpenDRIVE更多的数据来定义车道,OpenDRIVE只需要指定车道宽度,而Apollo需要点来描述车道边界,为了在Apollo中使用OpenDRIVE地图,可以将OpenDRIVE格式转换为Apollo格式,Lanelet2地图也可以转换为OpenDRIVE地图格式,Carla是一个用于自动驾驶的开源模拟器,它提供了一个PythonAPI,用于将OSM地图转换为OpenDRIVE地图。
局限性和开放性问题
高精地图生成技术近年来得到了快速发展,然而,仍然存在局限性,二维图像上的特征提取可以快速生成使用航空图像的大规模地图的车道线和道路标记等特征,但提取不包含高度或深度信息,通过将道路网GPS数据与收集的GPS数据进行匹配并添加相应的高度,可以手动将高度或高度信息添加到2D地图中,以创建2.5D地图。然而,它仍然缺乏深度信息,这在车辆自定位时绕过障碍物时极为重要,2D高精地图对基础设施的微小变化也不敏感,这将无法使地图保持最新。
MLS 3D点云上的特征提取是向高精地图添加详细道路信息的更常见和更强大的方法,具有提取的三维特征的高精地图提供深度信息和更新的环境信息,但需要昂贵的激光雷达和高计算成本,收集可用的点云数据也很耗时。比如使用众包方法保持高精地图的更新,但众包方法并不总是对个别研究人员可用的解决方案,为城市地图收集点云数据将具有挑战性。这些局限性导致了需要进一步研究和开发的一些挑战性问题:
1,向2D地图添加更多功能,如深度信息,并保持持续更新;
2、提高3D地图生成过程的效率,并使大规模高精地图的3D地图成为可能,而不需要花费太多时间和计算能力。
一种解决方案是集成道路网络和点云以生成高精地图,这可以使用Autoware完成。此外,据作者所知,目前还没有很多针对人行道特征提取的方法,这是至关重要的,也是迫切需要的,因为一些自动驾驶系统要么设计为在人行道上行驶,要么需要在高速公路上测试之前在人行道上进行可行性测试,此外,高精地图的完成度和整合(将所有模块和功能合并到高精地图中)仍然是地图公司开发的商业化方法,这对于学术界和个人研究人员来说仍然是一个悬而未决的问题,需要进一步的研究和结论。
总结
在这篇综述中,分析了最近用于自动驾驶的高精地图生成技术,将高精地图的基本结构概括为三个层次:道路模式,车道线模式,定位模式。
文章将分成三个部分:
(1)比较用于生成高精地图的数据采集,介绍三维点云生成技术。
(2)高精地图的特征提取方法,包括道路网络、道路标记线和杆状物体,并讨论了这些方法的局限性。
(3)介绍支持高精地图的框架,包括Lanelet2、OpenDRIVE和Apollo,还提供了一些用于在三个框架之间转换地图格式的有用工具。
文章中的具体参考文献请查阅原文
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D目标检测:MV3D-Net
三维点云分割综述(上)
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
win下使用QT添加VTK插件实现点云可视化GUI
JSNet:3D点云的联合实例和语义分割
大场景三维点云的语义分割综述
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
基于局部凹凸性进行目标分割
基于三维卷积神经网络的点云标记
点云的超体素(SuperVoxel)
基于超点图的大规模点云分割
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
【开源方案共享】ORB-SLAM3开源啦!
【论文速读】AVP-SLAM:自动泊车系统中的语义SLAM
【点云论文速读】StructSLAM:结构化线特征SLAM
SLAM和AR综述
常用的3D深度相机
AR设备单目视觉惯导SLAM算法综述与评价
SLAM综述(4)激光与视觉融合SLAM
Kimera实时重建的语义SLAM系统
SLAM综述(3)-视觉与惯导,视觉与深度学习SLAM
易扩展的SLAM框架-OpenVSLAM
高翔:非结构化道路激光SLAM中的挑战
SLAM综述之Lidar SLAM
基于鱼眼相机的SLAM方法介绍