LSTM+CNN模型厄尔尼诺事件预测
Background
一、什么是ENSO现象
ENSO(El Niño-Southern Oscillation)是发生于赤道东太平洋地区的风场和海面温度震荡。ENSO是低纬度的海-气相互作用现象,在海洋方面表现为厄尔尼诺-拉尼娜的转变,在大气方面表现为南方涛动。
二、ENSO现象有什么影响
包括厄尔尼诺现象及拉尼娜现象在内的厄尔尼诺-南方涛动现象会造成全球性的气温及降水变化。例如当厄尔尼诺现象发生时,南美洲地区会出现暴雨,而东南亚、澳大利亚则出现干旱。依赖农业和渔业的国家,特别是太平洋附近的发展中国家,通常受影响最大。
三、数据集介绍
Nino3.4指数定义为Nino3.4区(170°W-120°W,5°S-5°N)区域平均海温距平,气候平均值是1981-2010年。可以在美国国家海洋大气管理局网站(https://psl.noaa.gov/data/timeseries/monthly/NINO34/)下载。
MEI.v2指数利用海平面气压、海表温度、地面风的纬向分量、地面风的经向分量、热带太平洋海盆(30°S-30°N和100°E-70°W)上空的长波辐射五个变量计算得到。可在美国国家海洋大气管理局网站(https://psl.noaa.gov/enso/mei/)下载。
基于LSTM+CNN的时间序列预测
Nino指数能够在一定程度上反映厄尔尼诺或者拉尼娜现象,数据表现为一段时间序列。
针对该时间序列数据,我们可以对未来短期的Nino指数变化进行推测。时间序列处理算法按照算法类型大致可分为经典算法、深度学习算法、机器学习算法、启发式算法,按照数据维度可分为频域处理方法、时域处理方法。在本案例中,Nino指数是已经被处理好的数据,且由于数据量较少,经典算法和机器学习算法可能无法给出理想的解决办法。
在数据探索性分析(EDA)和特征工程(FE)之后,我们采用一维卷积神经网络对其进行预测。在设定一个窗口大小后,采用滑动窗口的思想,对原始数据的信息进行学习,得到的结果如下:
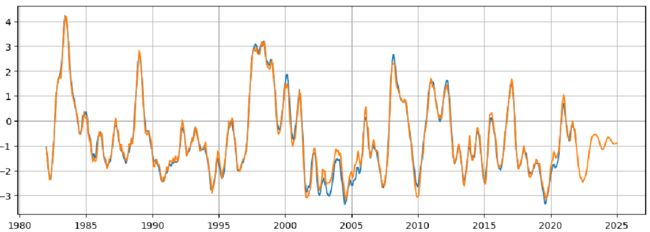
CNN虽然在原始数据集上有着不错的表现,但是在未来数据的预测中,效果却不是那么好。这是由于CNN注重局部特征,而在未来数据的推测中, f [ n ] = C N N ( f [ n − w s − 1 : n − 1 ] ) f[n]=CNN(f[n-ws-1:n-1]) f[n]=CNN(f[n−ws−1:n−1]),数据会倾向于收敛或是震荡。
为了解决模型无法从过往的信息中学习经验的问题,我们引入了LSTM长短期记忆模型,以期过往的经验模式能够为我们的预测提供决策。
基于LSTM模型得到的预测结果如下图所示:
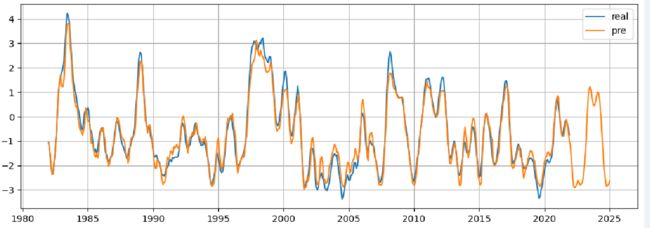
相较于CNN模型,该模型的均方根误差(MSE)较高,拟合效果不如原始CNN,但它在未来趋势上的映射要优于CNN。可以发现,未来三年的特征模式与2010-2012年的模式类似。
既然CNN注重局部信息,LSTM又能保存长期信息,那如果采用CNN+LSTM的方式能不能有一些新的进展呢?
基于这个思想,我们采用了下图的模型作为预测模型。
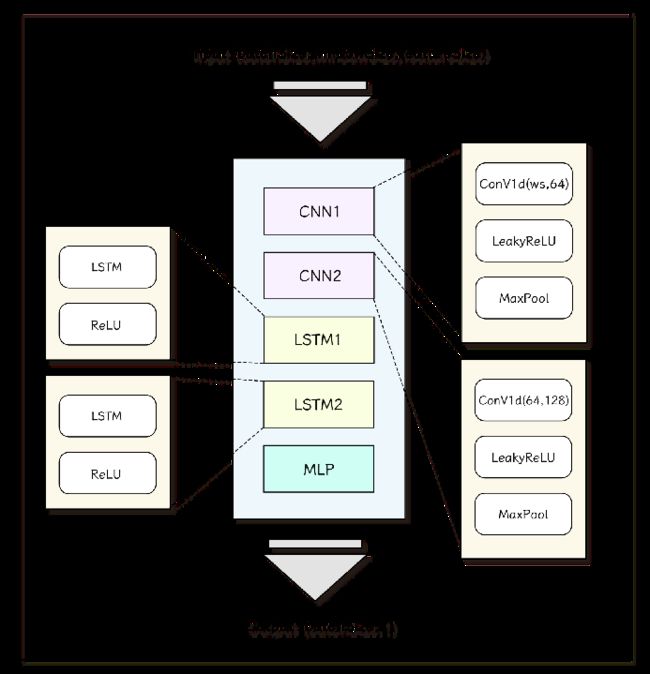
两层CNN用于学习局部特征,两层LSTM用于学习长时间特征。
在激活函数方面,我们注意到原始数据有大量的负值,因而采用了对负值比较友好的LeakyReLu激活函数。
每层卷积之后,添加一个池化层,以期达到减少参数量和增强模型泛化能力(非线性能力)的作用。
最后一层通过多层感知机(MLP)对数据维度进行映射,得到我们的输出结果。
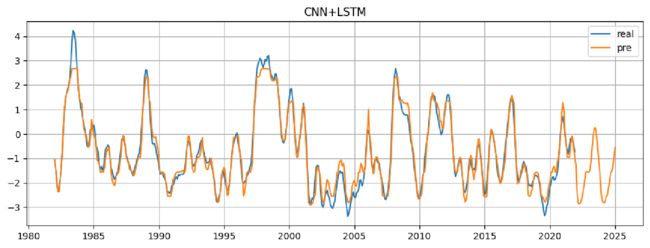
我们发现,该模型在前期的拟合上精度不是那么高,通过测试发现这是由于LeakReLu激活函数引起的现象。但是该模型在后半段已经有着可以接受的精度了。
由于模型比较简单,且训练样本较少,总所周知数据决定了模型的上限,为了解决这个问题,我们可以采用上采样的方式处理原始数据,以期得到更多的数据集。
诶,但是我们就是没有做,因为上采样也是基于该数据的,在误差将会被扩大。
于是我们采用了一种比较偷懒的方法,软投票Soft Voting来对单模进行集成,以期获得更好的学习效果和泛化能力。
我们通过三个模型(CNN、CNN+LSTM(LeakyReLu,三层CNN)、CNN+LSTM(用池化代替CNN的LeakyReLU,两层CNN)进行学习,根据损失误差分别赋予各自权重,最后的结果由三个模型投票得到。
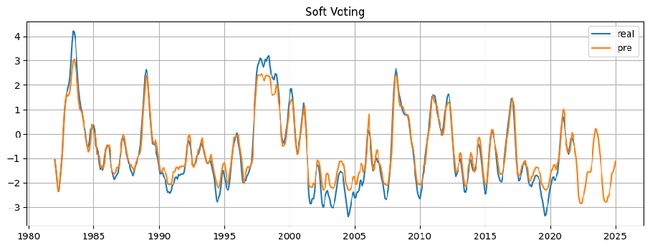
可以发现,在未来,23年~24年有可能会发生拉尼娜现象。
代码实现
1️⃣数据预处理阶段
首先是导入我们的模块,这部分不做过多的赘述~
import torch
import pandas as pd
import numpy as np
import torch.nn as nn
import torch.nn.functional as F
import matplotlib.pyplot as plt
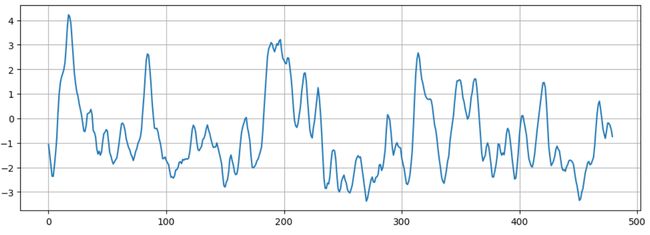
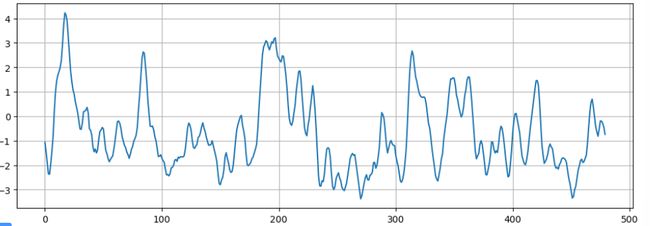
EDA阶段,读取数据并展示,我们选取了1982~2021年共四十年的数据。
data=pd.read_excel(r"data1.xlsx")
data.head()

数据的维度是13*40,第一列并不是我们所需要的。
为了方便处理,可以通过np.ravel()函数对数据进行展平。
data=np.array(data.drop("val",axis=1).values).ravel()
plt.figure(figsize=(12,4))
plt.grid(True)
plt.plot(data)
plt.show()
我们将数据划分为训练集和测试集:
# 划分数据集
test_size=12
train_set=data[:-test_size]
test_set=data[-test_size:]
在下一步的操作中,我们将会对数据进行归一化处理(其实也没有必要啦,因为只有单维度的数据,量纲影响不是那么关键)
from sklearn.preprocessing import MinMaxScaler
# 归一化处理
scaler = MinMaxScaler(feature_range=(-1, 1))
train_norm = scaler.fit_transform(train_set.reshape(-1, 1))
为了能够输入模型,需要构造一个可迭代的数据集!这里可以选择继承DataLoader类,或者自己设定一个数据迭代器!
# 转换成 tensor
train_norm = torch.FloatTensor(train_norm).view(-1)
window_size = 12
def input_data(seq,ws):
out = []
L = len(seq)
for i in range(L-ws):
window = seq[i:i+ws]
label = seq[i+ws]
out.append((window, label))
return out
train_data = input_data(train_norm,window_size)
# 打印一组数据集
train_data[0]
window_size表示了滑动窗口的大小。我们将滑动窗口内的数据作为x,输出结果作为 y ^ \hat y y^,与真实的y进行比较。
(tensor([-0.3926, -0.4976, -0.6175, -0.7325, -0.7338, -0.6180, -0.4849, -0.3253,
-0.0604, 0.1461, 0.2669, 0.3300]),
tensor(0.3674))
总结一下,在EDA阶段,我们做了:
✅ 数据格式处理,筛选出需要的数据
✅ 对数据分布进行探查
✅ 数据归一化
✅ 划分训练集
✅ 构建数据生成器
2️⃣模型准备
在这阶段中,我们采用软投票的方式对多个模型的结果进行修正,具体内容可以见上文。
那我们先介绍模型一!正宗CNN!
class CNN_Net2(nn.Module):
def __init__(self):
super(CNN_Net2, self).__init__()
self.hidden=nn.Sequential(
nn.Conv1d(12,64,1),
nn.AdaptiveAvgPool1d(output_size=32),
nn.Conv1d(64,128,1),
nn.AdaptiveAvgPool1d(output_size=32),
nn.Flatten(),
nn.Linear(128*32,512),
nn.ReLU(),
nn.Linear(512,256),
nn.ReLU(),
nn.Linear(256,1)
)
def forward(self,x):
N, T = x.shape[0], x.shape[1]
x = x.transpose(1, 2)
return self.hidden(x)
一如既往的简洁明快,一维卷积也就是nn.Conv1d要求的输入格式为:[bs,f,n],f为特征维度。而输入nn.Linear()的数据则要求是一维的,因此需要将其展平。
至于x为什么要做个transpose交换第二和第三维度,是因为我们输入的数据格式为[bs,1,ws],这在后面会提到,这里按下不表。
下面是我们的模型二,CNN+LSTM模型。
class CNN(nn.Module):
def __init__(self, output_dim=1):
super(CNN, self).__init__()
self.relu = nn.ReLU(inplace=True)
self.conv1 = nn.Conv1d(12, 64, 1)
self.lr=nn.LeakyReLU(inplace=True)
self.maxpool1 = nn.AdaptiveAvgPool1d(output_size=32)
self.conv2 = nn.Conv1d(64, 128, 1)
self.maxpool2 = nn.AdaptiveAvgPool1d(output_size=32)
self.flatten = nn.Flatten()
self.lstm1 = nn.LSTM(128 * 32, 1024)
self.lstm2 = nn.LSTM(1024, 256)
self.fc = nn.Linear(256, 128)
self.fc1 = nn.Linear(128, 64)
self.fc2 = nn.Linear(64, 32)
self.fc3 = nn.Linear(32, output_dim)
def forward(self, x):
N, T = x.shape[0], x.shape[1]
x = x.transpose(1, 2)
x = self.conv1(x) # torch.Size([1, 64, 1])
x=self.lr(x)
x = self.maxpool1(x) # torch.Size([1, 64, 32])
x = self.conv2(x) # torch.Size([1, 128, 32])
x=self.lr(x)
x = self.maxpool2(x) # torch.Size([1, 128, 32])
# x = self.conv3(x) # torch.Size([32, 300, 298])
# x = self.maxpool3(x) # torch.Size([32, 300, 100])
x = self.flatten(x)
# 注意Flatten层后输出为(N×T,C_new),需要转换成(N,T,C_new)
_, C_new = x.shape
x = x.view(N, T, C_new)
# LSTM部分
x, h = self.lstm1(x)
x, h = self.lstm2(x)
# 注意这里只使用隐层的输出
x, _ = h
x = self.fc(x.reshape(-1,))
x = self.relu(x)
x = self.fc1(x)
x = self.relu(x)
x = self.fc2(x)
x = self.relu(x)
x = self.fc3(x)
return x
池化的操作会让第三维度有所变化,而输入LSTM的模型的数据维度应该是[bs,F,T],其中F表示初始序列长度,T表示特征变化,在这里,经过卷积和池化后的数据维度为:[1,128,32],经过Flatten()操作后,数据的维度变成[bs,F*T]也就是[1,1*128*32],我们还需要将其转化为LSTM模型接受的维度。注意CNN和LSTM接收维度一个是dim=1一个是dim=2。
对于LSTM,在Pytorch中,有如下的输出关系:
y , h = L S T M ( x ) y,h=LSTM(x) y,h=LSTM(x)
我们需要的最终结果是h里的第一个维度,但每次传递的依旧是y(实际上h[0]==y)。
3️⃣网络训练阶段
在本阶段,我们需要设置的有:
- 设备(GPU)
- 损失函数
- 优化器
- 模型存储路径
- 训练参数
- 精度
- 误差值
- 迭代次数等
import time
device="cuda" if torch.cuda.is_available() else "cpu"
torch.manual_seed(101)
model =CNN()
model=model.to(device)
Mloss=100000
path="./best_model.pth"
# 设置损失函数,这里使用的是均方误差损失
criterion = nn.MSELoss()
# 设置优化函数和学习率lr
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
# 设置训练周期
epochs = 100
criterion=criterion.to(device)
model.train()
start_time = time.time()
total_loss=0
检查你的cuda是否可用,如果可用,将损失函数和模型全部搬到cuda上处理。
for epoch in range(epochs):
for seq, y_train in train_data:
# 每次更新参数前都梯度归零和初始化
seq,y_train=seq.to(device),y_train.to(device)
optimizer.zero_grad()
# 注意这里要对样本进行reshape,
# 转换成conv1d的input size(batch size, channel, series length)
y_pred = model(seq.reshape(1,1,-1))
loss = criterion(y_pred, y_train)
loss.backward()
optimizer.step()
total_loss+=loss
if total_loss.tolist()<Mloss:
Mloss=total_loss.tolist()
torch.save(model.state_dict(),path)
Model_Loss[0]=total_loss.tolist()
print("Saving")
total_loss=0
print(f'Epoch: {epoch+1:2} Loss: {loss.item():10.8f}')
print(f'\nDuration: {time.time() - start_time:.0f} seconds')
可以注意到,我们在每次训练的时候,都会从一个迭代器中读取数据,这个迭代器可以是继承自DataLoader的,也可以是自己设定的。将数据搬到device上后,我们就需要按照以下模板训练网络:
1️⃣ 优化器梯度归零
2️⃣ 利用模型对bx进行训练,得到pred
3️⃣ 通过损失函数计算loss(pred,by)
4️⃣ 损失函数反向更新梯度
5️⃣ 更新优化器
6️⃣ 记录误差与精度,并在设定好的规则下存储最优模型参数
我们可以将这个阶段封装
def Train(model,seed=1):
device="cuda" if torch.cuda.is_available() else "cpu"
model=model.to(device)
Mloss=100000
path="./best_model%d.pth"%seed
# 设置损失函数,这里使用的是均方误差损失
criterion = nn.MSELoss()
# 设置优化函数和学习率lr
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
# 设置训练周期
epochs = 100
criterion=criterion.to(device)
model.train()
start_time = time.time()
total_loss=0
for epoch in range(epochs):
for seq, y_train in train_data:
# 每次更新参数前都梯度归零和初始化
seq,y_train=seq.to(device),y_train.to(device)
optimizer.zero_grad()
# 注意这里要对样本进行reshape,
# 转换成conv1d的input size(batch size, channel, series length)
y_pred = model(seq.reshape(1,1,-1))
loss = criterion(y_pred, y_train)
loss.backward()
optimizer.step()
total_loss+=loss
if total_loss.tolist()<Mloss:
Mloss=total_loss.tolist()
torch.save(model.state_dict(),path)
Model_Loss[seed]=total_loss.tolist()
print("Saving")
total_loss=0
print(f'Epoch: {epoch+1:2} Loss: {loss.item():10.8f}')
print(f'\nDuration: {time.time() - start_time:.0f} seconds')
return model
这样,方便我们对每个模型进行训练了。
m2=CNN_Net2()
m2=Train(m2,2)
m1=CNN_Net1()
m1=Train(m1,1)
m0=CNN()
m0=Train(m0,0)
4️⃣结果展示阶段
这个阶段要做的事情,就是让模型调成eval()模式,并且在冻结梯度更新的情况下,对数据进行预测。
我们的工作有:
- 加载最优结果模型
- 根据现有数据计算得到预测曲线
- 根据预测曲线预测未来三年的结果
- 拼接数据并展示
- 对每个数据利用多个模型进行决策
值得注意的是,我们之前做了归一化,最后的结果要返回去。需要借助scaler.inverse_transform函数。
然后我们可以通过np.arange()生成时间序列,作为坐标轴。
def Show(model,title="CNN+LSTM"):
model.eval()
model=model.cpu()
model.state_dict=torch.load(path)
preds=train_norm
PreV=[]
for i in range(480):
seq=torch.FloatTensor(preds[i:i+window_size]).reshape(1,1,-1)
with torch.no_grad():
try:
v=model(seq).item()
except:
break
PreV.append(v)
# 预测未来36个月
preds=PreV[-window_size:]
future=36
for i in range(future):
seq=torch.FloatTensor(preds[i:i+window_size]).reshape(1,1,-1)
with torch.no_grad():
preds.append(model(seq).item())
PreV=train_norm[:window_size ].tolist()+PreV+preds[window_size:]
true_predictions = scaler.inverse_transform(np.array(PreV).reshape(-1, 1))
print(true_predictions.shape)
# 对比真实值和预测值
plt.figure(figsize=(12,4))
plt.grid(True)
x1=np.arange('1982-01-01', '2022-01-01', dtype='datetime64[M]').astype('datetime64[D]')
plt.plot(x1,data,label='real')
x2 = np.arange('1982-01-01', '2025-02-01', dtype='datetime64[M]').astype('datetime64[D]').reshape(-1,1)
plt.plot(x2,true_predictions,label="pre")
plt.legend()
plt.title(title)
plt.show()
在软投票方面,我们只需要做以下修改:
preds=train_norm
PreV=[]
for i in range(480):
seq=torch.FloatTensor(preds[i:i+window_size]).reshape(1,1,-1)
with torch.no_grad():
try:
v=0
for i,m in enumerate(model_list):
v+=m(seq).item()*Model_Loss[i]
except:
break
PreV.append(v)
Model_Loss是三个模型的权重,算法为计算各自占比的逆事件的占比,简单作为权重放上去了。
# 预测未来36个月
preds=PreV[-window_size:]
future=36
for i in range(future):
seq=torch.FloatTensor(preds[i:i+window_size]).reshape(1,1,-1)
with torch.no_grad():
v=0
for i,m in enumerate(model_list):
v+=m(seq).item()*Model_Loss[i]
preds.append(v)
PreV=train_norm[:window_size ].tolist()+PreV+preds[window_size:]
true_predictions = scaler.inverse_transform(np.array(PreV).reshape(-1, 1))