SIPEED MAIX BIT K210使用MaixHub(新版)在线训练石头剪刀布手势识别模型并部署
这是在线训练的网址
MaixHub网址
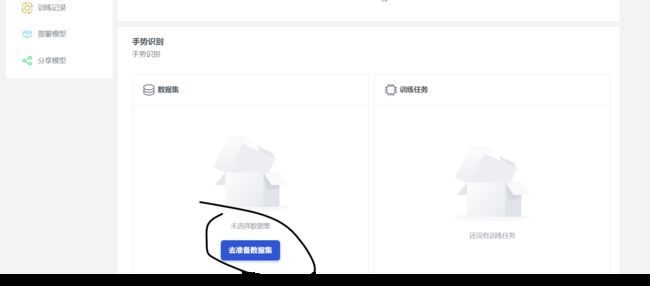
然后点击模型训练
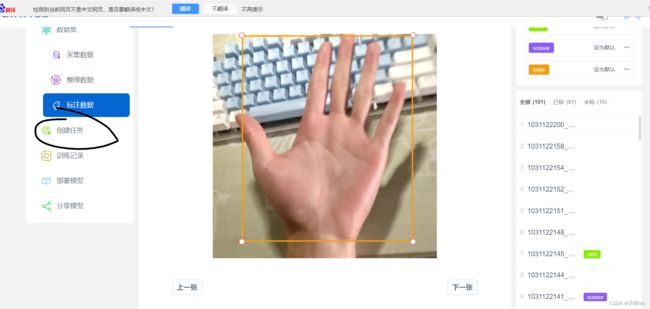
创建一个任务
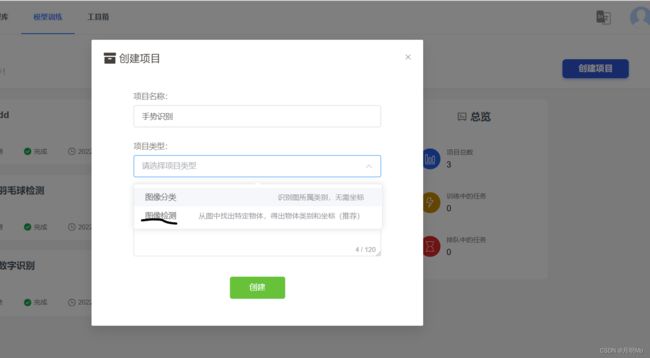
这里我们创建一个目标检测的任务,目标检测会返回坐标以及框出来,分类任务不会。
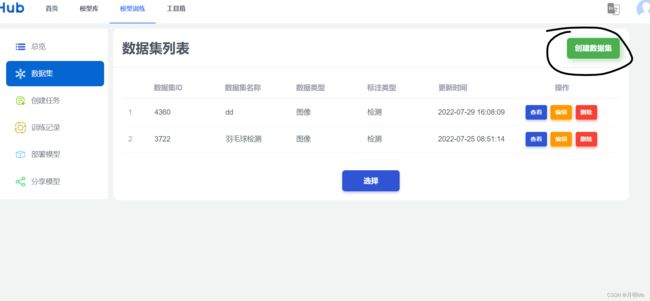
创建数据集。
选择刚刚创建的数据集。
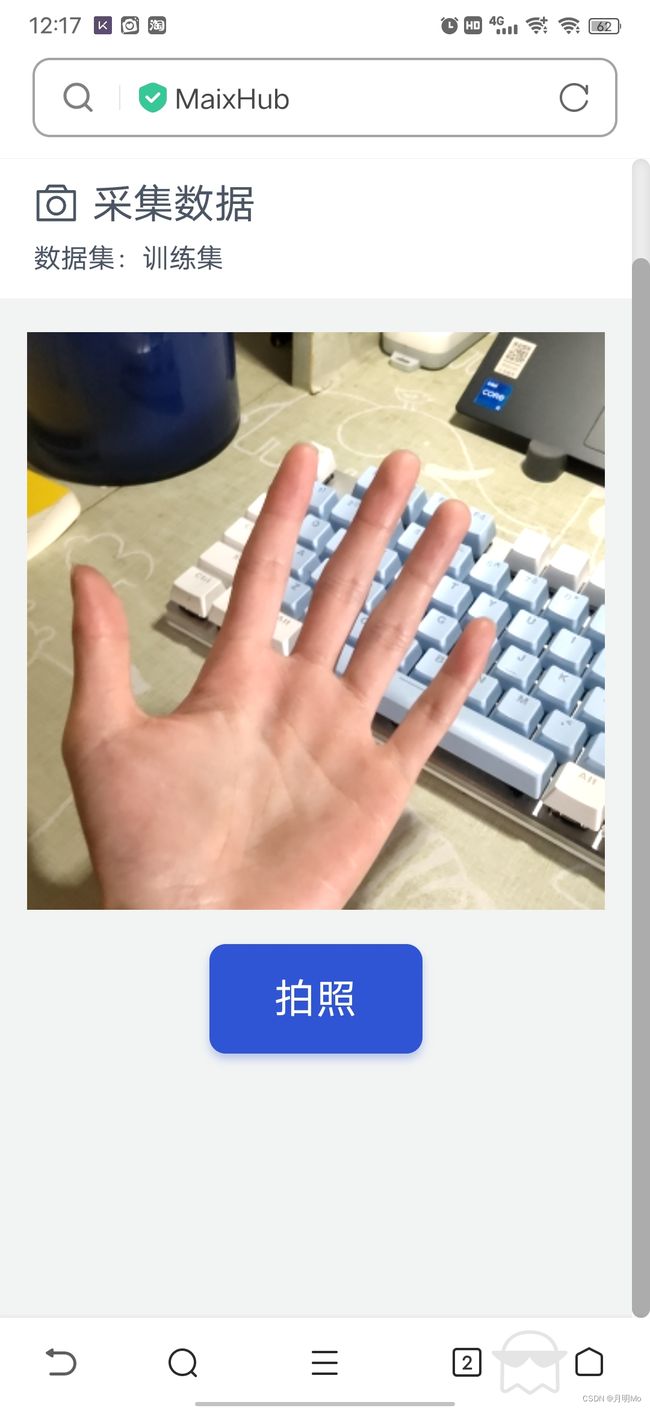
然后先采集训练集。
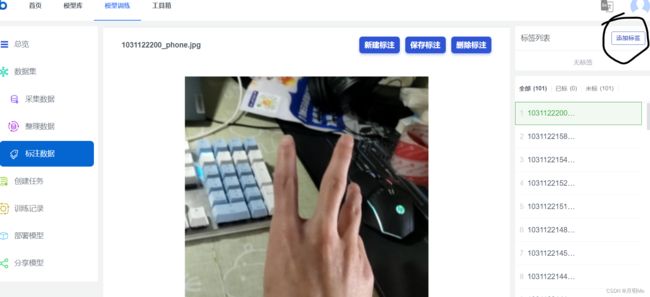
这里我使用手机进行采集,非常的方便。

采集完成后开始标注数据集。
注意:在采集数据集的时候可以采集负样本(图片中不含要检测的物体),或者和要检测的物体很像的物体,在标注的时候只需要不进行标注就行,也可以一张图片多个检测的目标。
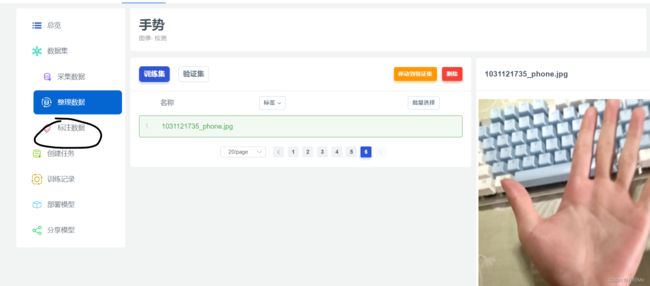
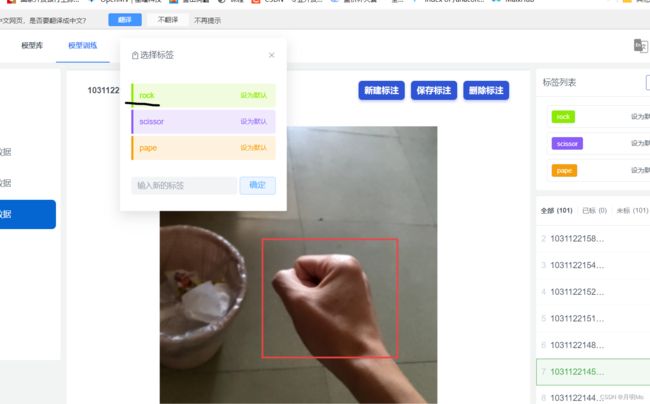
先添加石头剪刀布的标签。

然后进行标注。
按下W是标注,标注好了选择标签按下D就自动保存到了下一张。
全部标注好了就可以采集验证集然后进行标注,验证集占1/5就差不多,如果你的训练集足够的化是不需要采集验证集,会自动划分验证集。
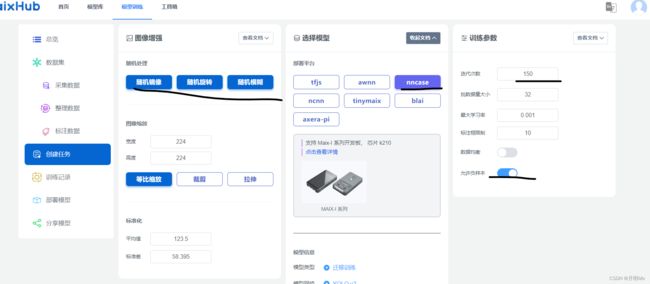
然后可以开始创建训练任务。
选择K210的模型。
这是我训练的过程,右边可以看到acc(正确率)和loss(错误率)的曲线,loss不断下降,acc不断上升就是正常的,如果acc没达到要求。可以增加迭代次数或者增加数据集来实现。(val_acc是测试集的正确率)

训练完成后可以开始部署模型。


然后下载解压会得到这三个文件。
其中kmodel就是模型文件了,将他保存到k210的sd卡中。
然后打开MaixPy的IDE来运行,将解压后的main.py文件复制到IDE运行就可以了。
# generated by maixhub, tested on maixpy3 v0.4.8
# copy files to TF card and plug into board and power on
import sensor, image, lcd, time
import KPU as kpu
import gc, sys
input_size = (224, 224)
labels = ['pape', 'rock', 'scissor']
anchors = [3.94, 4.22, 3.52, 3.38, 4.41, 4.97, 2.56, 3.0, 5.72, 5.97]
def lcd_show_except(e):
import uio
err_str = uio.StringIO()
sys.print_exception(e, err_str)
err_str = err_str.getvalue()
img = image.Image(size=input_size)
img.draw_string(0, 10, err_str, scale=1, color=(0xff,0x00,0x00))
lcd.display(img)
def main(anchors, labels = None, model_addr="/sd/m.kmodel", sensor_window=input_size, lcd_rotation=0, sensor_hmirror=False, sensor_vflip=False):
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_windowing(sensor_window)
sensor.set_hmirror(sensor_hmirror)
sensor.set_vflip(sensor_vflip)
sensor.run(1)
lcd.init(type=1)
lcd.rotation(lcd_rotation)
lcd.clear(lcd.WHITE)
if not labels:
with open('labels.txt','r') as f:
exec(f.read())
if not labels:
print("no labels.txt")
img = image.Image(size=(320, 240))
img.draw_string(90, 110, "no labels.txt", color=(255, 0, 0), scale=2)
lcd.display(img)
return 1
try:
img = image.Image("startup.jpg")
lcd.display(img)
except Exception:
img = image.Image(size=(320, 240))
img.draw_string(90, 110, "loading model...", color=(255, 255, 255), scale=2)
lcd.display(img)
try:
task = None
task = kpu.load(model_addr)
kpu.init_yolo2(task, 0.5, 0.3, 5, anchors) # threshold:[0,1], nms_value: [0, 1]
while(True):
img = sensor.snapshot()
t = time.ticks_ms()
objects = kpu.run_yolo2(task, img)
t = time.ticks_ms() - t
if objects:
for obj in objects:
pos = obj.rect()
img.draw_rectangle(pos)
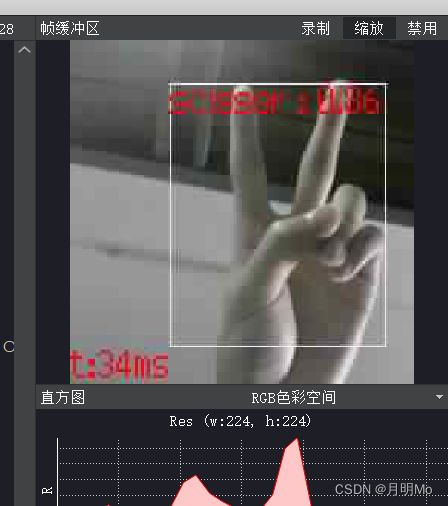
img.draw_string(pos[0], pos[1], "%s : %.2f" %(labels[obj.classid()], obj.value()), scale=2, color=(255, 0, 0))
img.draw_string(0, 200, "t:%dms" %(t), scale=2, color=(255, 0, 0))
lcd.display(img)
except Exception as e:
raise e
finally:
if not task is None:
kpu.deinit(task)
if __name__ == "__main__":
try:
# main(anchors = anchors, labels=labels, model_addr=0x300000, lcd_rotation=0)
#把xxx.kmodel改成自己的model名字
main(anchors = anchors, labels=labels, model_addr="/sd/xxx.kmodel")
except Exception as e:
sys.print_exception(e)
lcd_show_except(e)
finally:
gc.collect()
效果如下: