三种图像内插法(最近邻内插法、双线性内插法、双三次内插法)的做法 & 代码实现
参考博客
数字图像处理学习笔记(四)——数字图像的内插、度量、表示与质量_闭关修炼——暂退的博客-CSDN博客
数字图像处理学习笔记(七)——用Pycharm及MATLAB实现三种图像内插法(最近邻内插法、双线性内插法、双三次内插法)_闭关修炼——暂退的博客-CSDN博客
数字图像的内插
内插是在诸如放大、收缩、旋转和几何校正等任务中广泛应用的基本工具。
从根本上看,内插是用已知数据来 估计未知位置的数值的处理。
实现图像内插的方法有三种: 最近邻内插法、双线性内插法、双三次内插法 。
最近邻内插法
理解:在原图像中寻找最接近的像素,并把该像素的灰度赋给加想要创建大小的网格中的新像素。
当我们完成对网格中覆盖的所有点的灰度赋值后,就把图像扩展到原来规定的大小,得到放大后的图像。
本方法不常用是因为会产生不希望的人为缺陷的倾向(如某些直边缘的严重失真)。
双线性内插法
赋于点(x,y)灰度值公式:v(x,y)=ax+by+cxy+d
注:与该方法名称相反的是,双线性内插不是一种线性内插方法,因为其中包含有xy项。
4个系数可由4个用(x,y)点最近邻点写出的未知方程确定(四个未知数四个方程)。
双线性内插法给出了比最近邻内插好得多的结果,但随之而来的是计算量的增加。
双三次内插法
赋于点(x,y)灰度值公式:
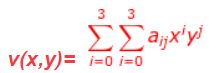
注:双三次内插包括16个最近邻点。
16个系数可由16个用(x,y)点最近邻点写出的未知方程式确定。
如果求和的上下限为1和0时,那么就变成了双线性内插v(x,y)=ax+by+cxy+d公式的形式。
通常,双三次内插在保持细节方面比双线性内插相对较好,但其计算量非常大。
双三次内插是商业图像编辑程序的标准内插方法。
数字图像的度量
关于数字图像的度量,有欧氏距离、曼哈顿距离、切比雪夫距离之分。
对于坐标分别为(x,y),(s,t),(v,w)的像素p,q,z。
欧几里得(欧式)距离:

注:距点(x,y)的距离小于等于某个值r的像素是中心在(x,y)且半径为r的圆平面。
D4(又称城市街区、曼哈顿)距离:

注:距点(x,y)的距离小于等于某个值r的像素形成一个中心在(x,y)的菱形.
例如距中心点(x,y)的距离小于等于2的像素,形成固定距离的如右图轮廓,其中=1的像素是(x,y)的4领域。:

D8(又称切比雪夫、棋盘)距离:
![]()
注:距点(x,y)的距离小于等于某个值r的像素形成一个中心在(x,y)的方形。
例如距中心点(x,y)的距离小于等于2的像素,形成固定距离的如右图轮廓,其中=1的像素是(x,y)的8领域。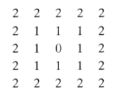
数字图像的表示
二维离散亮度函数——f(x,y):
x,y说明图像像素的空间坐标;
函数值 f 代表了在点(x,y)处像素的灰度值。
二维矩阵——A[m,n]:
m,n说明图像的宽和高;
矩阵元素a(i,j)的值,表示图像在第 i 行,第 j 列的像素的灰度值(i,j表示几何位置)。
图像描述信息:如图像高度和宽度等信息。
图像数据:顺序存放的连续数据。
注:1字节=8位;
对于2色位图,1位表示一个像素颜色(2=), 所以一个字节表示8个像素;
对于16色位图,4位表示一个像素颜色(16=), 所以一个字节表示2个像素;
对于256色位图,8位表示一个像素颜色(256=),所以1个字节表示1个像素;
对于真彩色图,3个字节表示一个像素(因为真彩图有R、G、B三个通道)。
数字图像的质量
灰度级:表示像素明暗程度的整数量。
例如:像素的取值范围为0-255,就称该图像为256个灰度级的图像。
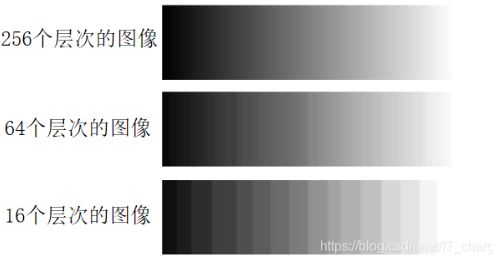
层次:表示图像实际拥有的灰度级的数量。
例如:具有32种不同取值的图像,可称该图像具有32个层次。
图像数据的实际层次越多,视觉效果就越好。
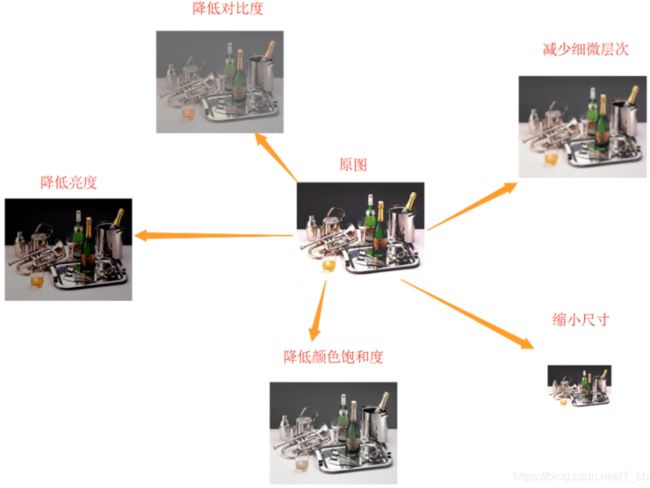
对比度:指一幅图像中灰度反差的大小 。
对比度 = 最大亮度 / 最小亮度(即最大像素值/最小像素值)
清晰度:与清晰度相关的主要因素:亮度、对比度、尺寸大小、细微层次、颜色饱和度。
python实现
from PIL import Image
import matplotlib.pyplot as plt
import numpy as np
import math
def NN_interpolation(img,dstH,dstW):
scrH,scrW,_=img.shape
retimg=np.zeros((dstH,dstW,3),dtype=np.uint8)
for i in range(dstH):
for j in range(dstW):
scrx=round((i+1)*(scrH/dstH))
scry=round((j+1)*(scrW/dstW))
retimg[i,j]=img[scrx-1,scry-1]
return retimg
def BiLinear_interpolation(img,dstH,dstW):
scrH,scrW,_=img.shape
img=np.pad(img,((0,1),(0,1),(0,0)),'constant')
retimg=np.zeros((dstH,dstW,3),dtype=np.uint8)
for i in range(dstH):
for j in range(dstW):
scrx=(i+1)*(scrH/dstH)-1
scry=(j+1)*(scrW/dstW)-1
x=math.floor(scrx)
y=math.floor(scry)
u=scrx-x
v=scry-y
retimg[i,j]=(1-u)*(1-v)*img[x,y]+u*(1-v)*img[x+1,y]+(1-u)*v*img[x,y+1]+u*v*img[x+1,y+1]
return retimg
def BiBubic(x):
x=abs(x)
if x<=1:
return 1-2*(x**2)+(x**3)
elif x<2:
return 4-8*x+5*(x**2)-(x**3)
else:
return 0
def BiCubic_interpolation(img,dstH,dstW):
scrH,scrW,_=img.shape
#img=np.pad(img,((1,3),(1,3),(0,0)),'constant')
retimg=np.zeros((dstH,dstW,3),dtype=np.uint8)
for i in range(dstH):
for j in range(dstW):
scrx=i*(scrH/dstH)
scry=j*(scrW/dstW)
x=math.floor(scrx)
y=math.floor(scry)
u=scrx-x
v=scry-y
tmp=0
for ii in range(-1,2):
for jj in range(-1,2):
if x+ii<0 or y+jj<0 or x+ii>=scrH or y+jj>=scrW:
continue
tmp+=img[x+ii,y+jj]*BiBubic(ii-u)*BiBubic(jj-v)
retimg[i,j]=np.clip(tmp,0,255)
return retimg
im_path='/home/jovyan/img/earth.jpg'
image=np.array(Image.open(im_path))
image1=NN_interpolation(image,image.shape[0]*2,image.shape[1]*2)
image1=Image.fromarray(image1.astype('uint8')).convert('RGB')
image1.save('/home/jovyan/img/NNEarth.jpg')
image2=BiLinear_interpolation(image,image.shape[0]*2,image.shape[1]*2)
image2=Image.fromarray(image2.astype('uint8')).convert('RGB')
image2.save('/home/jovyan/img/BiLinearEarth.jpg')
image3=BiCubic_interpolation(image,image.shape[0]*2,image.shape[1]*2)
image3=Image.fromarray(image3.astype('uint8')).convert('RGB')
image3.save('/home/jovyan/img/BiCubicEarth.jpg')
Matlab代码实现
①最近邻插值
% 最近邻插值
% 输入图像文件及放大率
% 输出根据放大率变化后的新图像
function nearest_neighbor = nearest_neighbor(filename,R)
% 初始化,读入图像,图像数据为m*n*color
img = imread('E:\earth.GIF');
% 变化后图像
[row,col,color] = size(img); % 获得图像的行列数及色板数
row = round(row*0.8); % 新图像行
col = round(col*0.8); % 新图像列
% 新图像初始化
% 使用class获得原图像的数据类型,使得新图像数据类型与原图像保持一致
img_new = zeros(row,col,color,class(img));
% 对新图像的行、列、色板赋值
for i = 1:row
for j = 1:col
for n = 1:color
x = round(i/0.8);
y = round(j/0.8);
% 为了避免x和y等于0而报错,采取+1处理即可
if x == 0
x = x+1;
end
if y == 0
y = y+1;
end
img_new(i,j,n) = img(x,y,n);
end
end
end
% 显示原图像
figure;
imshow(img);
title("Original Image");
% 显示新图像
figure;
imshow(img_new);
title("New Image");
end
②双线性插值
% 双线性插值
% 输入图像文件及放大率
% 输出根据放大率变化后的新图像
function bilinear_interpolation = bilinear_interpolation(filename,R)
% 初始化,读入图像,图像数据为m*n*color
img = imread('H:\earth.JPG');
% 变化后图像
[row,col,color] = size(img); % 获得图像的行列数及色板数
row = round(row*0.8); % 新图像行
col = round(col*0.8); % 新图像列
% 新图像初始化
% 使用class获得原图像的数据类型,使得新图像数据类型与原图像保持一致
img_new = zeros(row,col,color,class(img));
% 对新图像的行、列、色板赋值
for i = 1:row
for j = 1:col
for n = 1:color
x = round(i/0.8);
y = round(j/0.8);
if x == 0
x = x+1;
end
if y ==0
y = y+1;
end
u = i/0.8-floor(i/0.8); %求取水平方向上的权重
v = j/0.8-floor(j/0.8); %求取垂直方向上的权重
% 此处需要对图像边缘进行例外处理
% 本例对图像右边缘及下边缘用最近邻插值计算
if i >= row-0.8 || j >= col-0.8
img_new(i,j,n) = img(x,y,n);
else
img_new(i,j,n) = u*v*img(x,y,n)+(1-u)*v*img(x+1,y,n)+u*(1-v)*img(x,y+1,n)+(1-u)*(1-v)*img(x+1,y+1,n);
end
end
end
end
% 显示原图像
figure;
imshow(img);
title("Original Image");
% 显示新图像
figure;
imshow(img_new);
title("New Image");
③双三次插值
% 双三次插值
tic; % calculate running time
% read original image I
I = imread('G:\earth.GIF');
I = double(I);
[oh,ow,od] = size(I);
zmf = 2; %缩放因子
% initial target image TI
th = round(oh*zmf);
tw = round(ow*zmf);
TI = zeros(th,tw,od); %预分配内存提高计算速度
% add original image with 2 rows and 2 cols
% expand the border to prevent calculation overflow
a = I(1,:,:); b = I(oh,:,:);
temp_I = [a;a;I;b;b];
c = temp_I(:,1,:); d = temp_I(:,ow,:);
FI = [c,c,temp_I,d,d];
% fill target image with new pixels
for w = 1:tw
j = floor(w/zmf)+2; v = rem(w,zmf)/zmf;
for h = 1:th
i = floor(h/zmf)+2; u = rem(h,zmf)/zmf;
A = [s(u+1),s(u),s(u-1),s(u-2)];
C = [s(v+1);s(v);s(v-1);s(v-2)];
for d = 1:od % image's 3 channels
B = FI(i-1:i+2,j-1:j+2,d);
TI(h,w,d) = A*B*C;
end
end
end
figure;
imshow(uint8(TI));
toc;
% 插值核函数
function w = s(wx)
wx = abs(wx);
if wx<1
w = 1 - 2*wx^2 + wx^3;
elseif wx>=1 && wx<2
w = 4 - 8*wx + 5*wx^2 - wx^3;
else
w = 0;
end
end