PyTorch 使用GPU训练
Pytorch 使用GPU训练
使用 GPU 训练只需要在原来的代码中修改几处就可以了。
我们有两种方式实现代码在 GPU 上进行训练
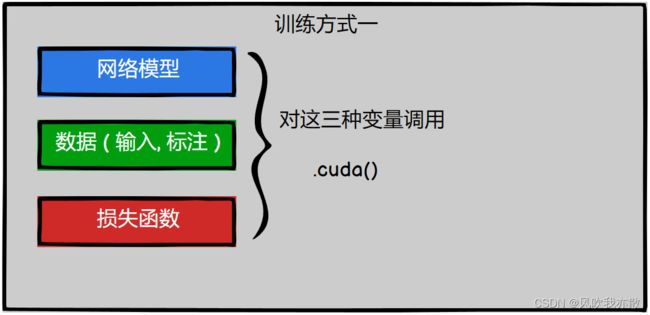
## 方法一 .cuda()
我们可以通过对网络模型,数据,损失函数这三种变量调用 .cuda() 来在GPU上进行训练
# 将网络模型在gpu上训练
model = Model()
model = model.cuda()
# 损失函数在gpu上训练
loss_fn = nn.CrossEntropyLoss()
loss_fn = loss_fn.cuda()
# 数据在gpu上训练
for data in dataloader:
imgs, targets = data
imgs = imgs.cuda()
targets = targets.cuda()
但是如果电脑没有 GPU 就会报错,更好的写法是先判断 cuda 是否可用:
# 将网络模型在gpu上训练
model = Model()
if torch.cuda.is_available():
model = model.cuda()
# 损失函数在gpu上训练
loss_fn = nn.CrossEntropyLoss()
if torch.cuda.is_available():
loss_fn = loss_fn.cuda()
# 数据在gpu上训练
for data in dataloader:
imgs, targets = data
if torch.cuda.is_available():
imgs = imgs.cuda()
targets = targets.cuda()
代码案例:
# 以 CIFAR10 数据集为例,展示一下完整的模型训练套路,完成对数据集的分类问题
import torch
import torchvision
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import time
# 准备数据集
train_data = torchvision.datasets.CIFAR10(root="dataset", train=True, transform=torchvision.transforms.ToTensor(), download=True)
test_data = torchvision.datasets.CIFAR10(root="dataset", train=False, transform=torchvision.transforms.ToTensor(), download=True)
# 获得数据集的长度 len(), 即length
train_data_size = len(train_data)
test_data_size = len(test_data)
# 格式化字符串, format() 中的数据会替换 {}
print("训练数据集及的长度为: {}".format(train_data_size))
print("测试数据集及的长度为: {}".format(test_data_size))
# 利用DataLoader 来加载数据
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 创建网络模型
class Model(nn.Module):
def __init__(self) -> None:
super().__init__()
self.model = nn.Sequential(
nn.Conv2d(3, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, 5, 1, 2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(64*4*4, 64),
nn.Linear(64, 10)
)
def forward(self, input):
input = self.model(input)
return input
model = Model()
if torch.cuda.is_available():
model = model.cuda() # 在 GPU 上进行训练
# 创建损失函数
loss_fn = nn.CrossEntropyLoss()
if torch.cuda.is_available():
loss_fn = loss_fn.cuda() # 在 GPU 上进行训练
# 优化器
learning_rate = 1e-2 # 1e-2 = 1 * (10)^(-2) = 1 / 100 = 0.01
optimizer = torch.optim.SGD(model.parameters(), lr = learning_rate)
# 设置训练网络的一些参数
total_train_step = 0 # 记录训练的次数
total_test_step = 0 # 记录测试的次数
epoch = 10 # 训练的轮数
# 添加tensorboard
writer = SummaryWriter("logs_train")
start_time = time.time() # 开始训练的时间
for i in range(epoch):
print("------第 {} 轮训练开始------".format(i+1))
# 训练步骤开始
for data in train_dataloader:
imgs, targets = data
if torch.cuda.is_available():
imgs = imgs.cuda()
targets = targets.cuda() # 在gpu上训练
outputs = model(imgs) # 将训练的数据放入
loss = loss_fn(outputs, targets) # 得到损失值
optimizer.zero_grad() # 优化过程中首先要使用优化器进行梯度清零
loss.backward() # 调用得到的损失,利用反向传播,得到每一个参数节点的梯度
optimizer.step() # 对参数进行优化
total_train_step += 1 # 上面就是进行了一次训练,训练次数 +1
# 只有训练步骤是100 倍数的时候才打印数据,可以减少一些没有用的数据,方便我们找到其他数据
if total_train_step % 100 == 0:
end_time = time.time() # 训练结束时间
print("训练时间: {}".format(end_time - start_time))
print("训练次数: {}, Loss: {}".format(total_train_step, loss))
writer.add_scalar("train_loss", loss.item(), total_train_step)
# 如何知道模型有没有训练好,即有咩有达到自己想要的需求
# 我们可以在每次训练完一轮后,进行一次测试,在测试数据集上跑一遍,以测试数据集上的损失或正确率评估我们的模型有没有训练好
# 顾名思义,下面的代码没有梯度,即我们不会利用进行调优
total_test_loss = 0
total_accuracy = 0 # 准确率
with torch.no_grad():
for data in test_dataloader: # 测试数据集中取数据
imgs, targets = data
if torch.cuda.is_available():
imgs = imgs.cuda() # 在 GPU 上进行训练
targets = targets.cuda()
outputs = model(imgs)
loss = loss_fn(outputs, targets) # 这里的 loss 只是一部分数据(data) 在网络模型上的损失
total_test_loss = total_test_loss + loss # 整个测试集的loss
accuracy = (outputs.argmax(1) == targets).sum() # 分类正确个数
total_accuracy += accuracy # 相加
print("整体测试集上的loss: {}".format(total_test_loss))
print("整体测试集上的正确率: {}".format(total_accuracy / test_data_size))
writer.add_scalar("test_loss", total_test_loss)
writer.add_scalar("test_accuracy", total_accuracy / test_data_size, total_test_step)
total_test_loss += 1 # 测试完了之后要 +1
torch.save(model, "model_{}.pth".format(i))
print("模型已保存")
writer.close()
方法二 .to(device)
指定 训练的设备
device = torch.device("cpu") # 使用cpu训练
device = torch.device("cuda") # 使用gpu训练
device = torch.device("cuda:0") # 当电脑中有多张显卡时,使用第一张显卡
device = torch.device("cuda:1") # 当电脑中有多张显卡时,使用第二张显卡
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
使用 GPU 训练
model = model.to(device)
loss_fn = loss_fn.to(device)
for data in train_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
代码示例:
# 以 CIFAR10 数据集为例,展示一下完整的模型训练套路,完成对数据集的分类问题
import torch
import torchvision
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import time
# 定义训练的设备
device = torch.device("cuda")
# 准备数据集
train_data = torchvision.datasets.CIFAR10(root="dataset", train=True, transform=torchvision.transforms.ToTensor(), download=True)
test_data = torchvision.datasets.CIFAR10(root="dataset", train=False, transform=torchvision.transforms.ToTensor(), download=True)
# 获得数据集的长度 len(), 即length
train_data_size = len(train_data)
test_data_size = len(test_data)
# 格式化字符串, format() 中的数据会替换 {}
print("训练数据集及的长度为: {}".format(train_data_size))
print("测试数据集及的长度为: {}".format(test_data_size))
# 利用DataLoader 来加载数据
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 创建网络模型
class Model(nn.Module):
def __init__(self) -> None:
super().__init__()
self.model = nn.Sequential(
nn.Conv2d(3, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 32, 5, 1, 2),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, 5, 1, 2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(64*4*4, 64),
nn.Linear(64, 10)
)
def forward(self, input):
input = self.model(input)
return input
model = Model()
model = model.to(device) # 在 GPU 上进行训练
# 创建损失函数
loss_fn = nn.CrossEntropyLoss()
loss_fn = loss_fn.to(device) # 在 GPU 上进行训练
# 优化器
learning_rate = 1e-2 # 1e-2 = 1 * (10)^(-2) = 1 / 100 = 0.01
optimizer = torch.optim.SGD(model.parameters(), lr = learning_rate)
# 设置训练网络的一些参数
total_train_step = 0 # 记录训练的次数
total_test_step = 0 # 记录测试的次数
epoch = 10 # 训练的轮数
# 添加tensorboard
writer = SummaryWriter("logs_train")
start_time = time.time() # 开始训练的时间
for i in range(epoch):
print("------第 {} 轮训练开始------".format(i+1))
# 训练步骤开始
for data in train_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = model(imgs) # 将训练的数据放入
loss = loss_fn(outputs, targets) # 得到损失值
optimizer.zero_grad() # 优化过程中首先要使用优化器进行梯度清零
loss.backward() # 调用得到的损失,利用反向传播,得到每一个参数节点的梯度
optimizer.step() # 对参数进行优化
total_train_step += 1 # 上面就是进行了一次训练,训练次数 +1
# 只有训练步骤是100 倍数的时候才打印数据,可以减少一些没有用的数据,方便我们找到其他数据
if total_train_step % 100 == 0:
end_time = time.time() # 训练结束时间
print("训练时间: {}".format(end_time - start_time))
print("训练次数: {}, Loss: {}".format(total_train_step, loss))
writer.add_scalar("train_loss", loss.item(), total_train_step)
# 如何知道模型有没有训练好,即有咩有达到自己想要的需求
# 我们可以在每次训练完一轮后,进行一次测试,在测试数据集上跑一遍,以测试数据集上的损失或正确率评估我们的模型有没有训练好
# 顾名思义,下面的代码没有梯度,即我们不会利用进行调优
total_test_loss = 0
total_accuracy = 0 # 准确率
with torch.no_grad():
for data in test_dataloader: # 测试数据集中取数据
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = model(imgs)
loss = loss_fn(outputs, targets) # 这里的 loss 只是一部分数据(data) 在网络模型上的损失
total_test_loss = total_test_loss + loss # 整个测试集的loss
accuracy = (outputs.argmax(1) == targets).sum() # 分类正确个数
total_accuracy += accuracy # 相加
print("整体测试集上的loss: {}".format(total_test_loss))
print("整体测试集上的正确率: {}".format(total_accuracy / test_data_size))
writer.add_scalar("test_loss", total_test_loss)
writer.add_scalar("test_accuracy", total_accuracy / test_data_size, total_test_step)
total_test_loss += 1 # 测试完了之后要 +1
torch.save(model, "model_{}.pth".format(i))
print("模型已保存")
writer.close()
【注】对于网络模型和损失函数,直接调用 .cuda() 或者 .to() 即可。但是数据和标注需要返回变量
为了方便记忆,最好都返回变量